 三相永磁电机的矢量控制
三相永磁电机的矢量控制

《三相永磁电机的矢量控制》由会员分享,可在线阅读,更多相关《三相永磁电机的矢量控制(13页珍藏版)》请在装配图网上搜索。
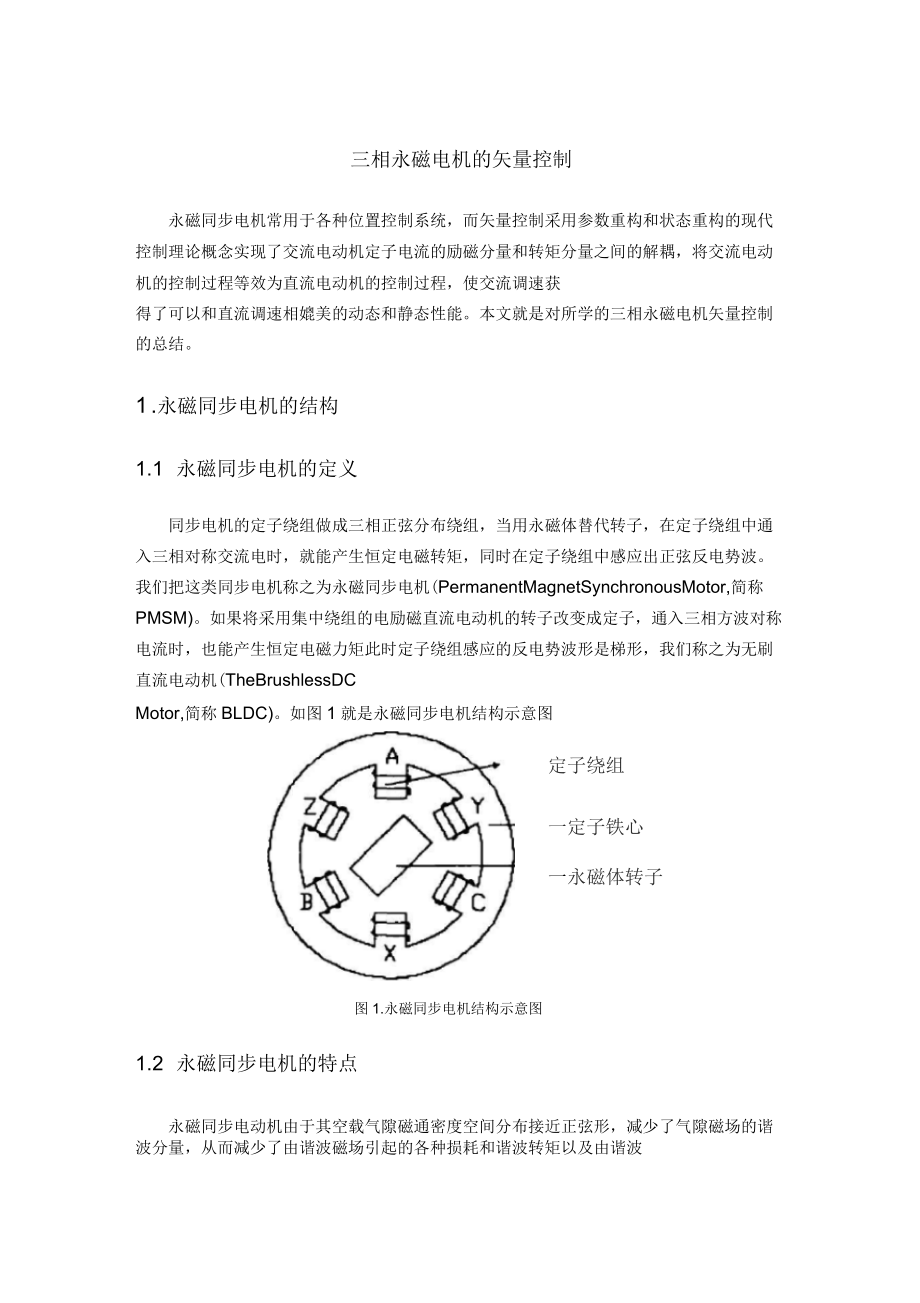
1、三相永磁电机的矢量控制永磁同步电机常用于各种位置控制系统,而矢量控制采用参数重构和状态重构的现代控制理论概念实现了交流电动机定子电流的励磁分量和转矩分量之间的解耦,将交流电动机的控制过程等效为直流电动机的控制过程,使交流调速获得了可以和直流调速相媲美的动态和静态性能。本文就是对所学的三相永磁电机矢量控制的总结。1 .永磁同步电机的结构1.1 永磁同步电机的定义同步电机的定子绕组做成三相正弦分布绕组,当用永磁体替代转子,在定子绕组中通入三相对称交流电时,就能产生恒定电磁转矩,同时在定子绕组中感应出正弦反电势波。我们把这类同步电机称之为永磁同步电机(PermanentMagnetSynchrono
2、usMotor,简称PMSM)。如果将采用集中绕组的电励磁直流电动机的转子改变成定子,通入三相方波对称电流时,也能产生恒定电磁力矩此时定子绕组感应的反电势波形是梯形,我们称之为无刷直流电动机(TheBrushlessDC图1.永磁同步电机结构示意图Motor,简称BLDC)。如图1就是永磁同步电机结构示意图定子绕组一定子铁心一永磁体转子1.2 永磁同步电机的特点永磁同步电动机由于其空载气隙磁通密度空间分布接近正弦形,减少了气隙磁场的谐波分量,从而减少了由谐波磁场引起的各种损耗和谐波转矩以及由谐波转矩引起的电磁振动,提高了电机的效率,并且使得电机在运行时转动更加平稳,噪声也得到了降低。同时,正弦
3、波永磁同步电动机可根据多种矢量控制方法来构成变频调速系统,实现高性能、高精度的传动。与交流异步电机相比,永磁同步电机具有下列优点:由于没有笼型转子,稀土永磁同步电机与异步电动机相比,具有较低的惯性,对于一定的电动机转矩就有较快的响应,即转矩/惯性比异步电动机的高;永磁同步电动机无转子损耗,所以效率更高;异步电动机需要定子励磁电流,而永磁同步电动机已存在于转子,对于同等容量输出,异步电动机效率低,需要更大功率的整流器、逆变器;异步电动机控制要比永磁同步电动机复杂;永磁同步电动机功率密度较高。永磁同步电机是一个多变量、非线性、高祸合的系统,其输出转矩与定子电流不成正比,而是复杂的函数关系,因此要得
4、到好的控制性能,必需进行磁场解祸,这种特点恰好适于应用矢量变换控制技术。而且在永磁同步电机的矢量控制过程中没有感应电机中的转差频率电流而且受转子参数的影响小,所以在永磁同步电机上更容易实现矢量控制。1.3 永磁电机转子结构分类永磁同步电机的种类根据永磁体在转子上安装的位置不同可以分为两类面装式和内埋式,而面装式又可分为面装凸出式、面装嵌入式,如图2所示。对于稀土永磁电机来说,由于永磁材料的相对回复磁导率接近,所以面装凸出式在电磁性能上属于隐极转子结构,面装嵌入式相邻的两个永磁磁极间有磁导率很大的永磁材料,故在电磁性能上属于凸极转子结构;面装凸出式结构的永磁电机结构简单、制造成本低、转动惯量小,
5、在正弦波永磁电机中得到了广泛应用。内埋式转子结构是将永磁体装在转子铁心内部,特点是机械强度高、磁路气隙小;与面装式转子相比,更适用于弱磁运行。为了便于控制,永磁同步电机的定子绕组一般都采用短距分布绕组,气隙磁场设计为正弦波,以产生正弦波反电势。面装凸出式面装ISt入式内埋式图2,永磁同步电机转子结构分类2 .永磁同步电机矢量控制系统2.1 永磁同步电机的数学模型永磁同步电机运转时其定子和转子处于相对运动状态,永久磁极与定子绕组、定子绕组与绕组之间的相互影响,导致永磁同步电机内部的电磁关系十分复杂,再加上磁路饱和和非线性因素,给建立永磁同步电机的精确数学模型带来了困难。在不影响研究效果的前提下需
6、简化永磁同步电机的数学模型,通常作以下假设:1 .忽略磁路中铁芯的磁饱和,不计铁芯的涡流和磁滞损耗;2 .转子上没有阻尼绕组,永磁体也没有阻尼作用;3 .永久磁铁在气隙中产生的磁势为正弦分布,无高次谐波;4 .永磁材料的电导率为零。图3.永磁同步电机的物理模型永磁同步电机的基本方程包括电压方程、磁链方程、转矩方程和运动方程,这些方程是永磁同步电机数学模型的基础。2.1.1 定子电压方程永磁同步电机定子电压方程为UAQaPA(2-1)UBRsiBpBUCQcpC式中:Rs为定子每相绕组电阻;A, B, C为三相绕组交链的磁链;P ddt为微分算子2.1.2 磁链方程和转矩方程永磁同步电机每相绕组
7、的磁链是它本身的自感磁链和其他绕组对它互感磁链之和。则磁链方程为AAABBABBCALCBLaclbcLCCiAfAfBfCA, B, C为三相绕组的磁链;LAB(2-2)LBA , LAC , LCA , LBC ,LCB 为定子各相之间的互感;fA的磁链。由于定子三相绕组互为fB,fC为永磁励磁磁场链过A, B, C绕组产生120,且认为每相间的互感是对称的,则有LabLba , Lac Lca , LbcLcb。与电励磁三相隐极同步电机一样,因电机气隙均匀,故A, BC绕组的自感和互感都与转子位置无关,均为常值。于是有式中,Ls另有Lsl LAA LBB LCC LsLml分别为相绕组的
8、漏电感和励磁电感。Lmi(2-3)L LABLBCLACLml CoS 231L-Lml2(2-4)另外,永磁磁通链过定子侧产生的磁链为fAf cosrAfBf cosrAfCf cosrA2323(2-5)式中,f为转子磁链。交流永磁电动机运行时,电动机的磁场储能1Wm- ik k2 k(k=A、B、C)(2-6)电流不变时,磁场储能对机械角速度m的偏导就是电磁转矩:(2-7)则转矩方程为TePn f iASin 殖iBSin rAic sinrA 3(2-8)2.2 坐标变换在A-B-C坐标系中,同步电机转子在电、磁结构上不对称,所以交流电机在三相静止坐标系中的数学模型很复杂,它是一个高阶
9、、非线性、强耦合的多变量系统,难于采用传统的控制方法进行交流调速,因此有必要采用矢量控制,即通过坐标变换将其数学模型做尽可能的简化,使其数学模型类似于直流电机的数学模型。2.2.1 坐标变换的基本思路三相正弦电流ia,ib,ic输入到交流电机的三相绕组里面时,会产生同步旋转的正弦合成电动势,不管采用哪种坐标系解析磁动势,其结果应该是相同的。(c)旋转的直流绕组(a)三相交流绕组 (b)两相交流绕组图4.交流电机绕组在三相静止、两相静止和两相旋转坐标系下的物理模型图4中的c图中,对于绕组而言,两个垂直且对等的绕组d和q在输入id和id后产生的合成磁动势F的位置是不变的。但是以一定速度将铁芯旋转后
10、磁动势F就可以等效为图4中a图和b图中的旋转磁动势。绕组q作为电枢绕组,d相则作为励磁绕组。综上所述,i、i和id、iq与ia,ic一样都可以产生等效的旋转磁动势。那么可以通过坐标变换将三相静止、两相静止及两相旋转这三种坐标系相互转换。2.2.2 两相静止坐标系统下电机方程坐标系的坐标变换称为定子静止三相ABC坐标系到定子静止两相Clark变换,变换公式TClark定子两相静止坐标系下磁链方程TClark0定子两相静止坐标下电压方程uuUo11122(3033屈22LAALABLACi AfLBALBB_ 1.LBC TClarki BfLCALCBLCCiC0faTClark fb fciR
11、s i Pio0(2-9)(2-10)(2-11)2.2.3 d、q坐标下电机方程dq0坐标系是随定子磁场同步旋转的坐标系,将d轴固定在转子励磁磁通f的方向上q轴为逆时针旋转方向超前d轴900电角度。图5.永磁同步电机dq0坐标系图取逆时针方向为转速的正方向。f为每极下永磁励磁磁链空间矢量,方向与磁极磁场轴线一致,d、q轴随同转子以电角速度(电角频率)一起旋转,它的空间坐标以d轴与参考坐标轴as间的电角度来确定,为定子三相基波合成旋转磁场轴线与永磁体基波励磁磁场轴线间的空间电角度,称为转矩角。三相永磁同步电机在dq0轴转子坐标系的定子电压方程为UdRsid(2-12)UqRsiq式中,Ud(2
12、-13)结合表面式永磁同步电机有Ld 的电压方程为Lq L ,在正弦稳态情况下,永磁同步电机Uq为定子电压矢量的d,q轴分量;id、iq为定子电流矢量的d,q轴分量;d、q为定子磁链的d,q轴分量可将(2-12)表示为UdRsidLdTWrLqiqdtdiqUqRsiqLqWLdidWrfdt(2-14)UdRsidWrLqiqUqRsiqWrLdidWrf磁链方程(2-15)dLdidfqLqiq转矩方程Tepnd i qqi d(2-16)2.3 永磁同步电机矢量控制原理2.3.1 矢量控制的基本原理矢量控制理论的提出从根本上解决了交流电动机转矩的高性能控制问题。基本思想是在三相交流电机上
13、模拟直流电机转矩控制的规律,在磁场定向坐标上,将定子电流矢量分解成产生磁通的励磁电流分量和产生转矩的转矩电流分量,并使两分量互相垂直,彼此独立,然后分别进行调节,实现转矩控制。因此,矢量控制的关键仍是对电流矢量的幅值和空间位置的控制。矢量控制一般是通过检测或估计电机转子磁通的位置及幅值来控制定子电流或电压,这样电机的转矩便只和磁通、电流有关,与直流电机的控制方法相似,可以得到很高的控制性能。对于永磁同步电机,转子磁通位置与转子机械位置相同,这样通过检测转子实际位置就可以得知电机转子磁通位置,从而使永磁同步电机的矢量控制比起异步电机的矢量控制大大简化。矢量控制是当前高性能交流调速系统一种典型的控
14、制方案。根据矢量控制原理,在不同的应用场合可选择不同的磁链矢量作为定向坐标轴,目前存在四种磁场定向控制方式转子磁链定向控制,定子磁链定向控制,气隙磁链定向控制和阻尼磁链定向控制。对于主要采用转子磁链定向方式,该方式对交流伺服系统等小容量驱动场合特别适合。按照控制目标可以分为:id0控制、cos1控制、总磁链恒定控制、最大转矩/电流控制、最大输出功率控制、转矩线性控制、直接转矩控制等。它们各有各的特点:id0控制最为简单,cos1控制可以降低与之匹配的变频器容量,恒磁链控制可以增大电动机的最大输出转矩等。2.3.2 励磁电流id0控制为转子磁极d轴的空间位置角,为定子电流矢量is与转子永磁磁链矢
15、量f间的夹角。定子电流d、q轴分量可写为(2-17)idiscosiqissin又有式(2-15)可得TPndiqqidPnLmdifsin1LdLqi:sin2(2-18)2PnfiqLdLqidiq当采用id0控制时,定子电流只有交轴分量,定子磁势空间矢量s与永磁体磁场空间矢量正交f,90,电磁转矩TTmPnfis,即只有永磁转矩分量。这种控制方式下单位定子电流可以获最大转矩,或是在产生所要求的转矩条件下所需定子电流最小,定子铜耗也最小,效率高。这也是表面式永磁同步电机常用id0控制的原因。2.3.3 功率因数cos1控制cos1控制是使电动机的功率因数包为1,即定子电流矢量is与电机端电
16、压矢量Us同相位。此时电动机矢量图如图6所示图6.cos1控制时永磁同步电机空间矢量图在COS1控制中,定子电流、电压与永磁同步电机电动势夹角相同,内功率角与的关系如下:一(2-19)2在这种控制方式下,电动机相对电网作单位功率因数运行,功率因数及效率等运行指标最好,变频器容量也省。但由于永磁同步电机的转子励磁无法调节,当负载变化时,电枢绕组的总磁链不为定值,因此,电枢电流与转矩无法保持线性关系。2.3.4 最大转矩/电流控制最大转矩/电流控制也称单位电流输出转矩最大控制,是在电动机输出给定转矩时,控制定子电流最小的电流控制策略。它是凸极永磁同步电机用的较多的一种控制策略,而对于隐极永磁同步电
17、机而言,实际上就是id0控制。采用最大最大转矩/电流控制时,其核心思想是寻求d、q轴电流的最优组合,使得给定转矩下的定子电流幅值最小。由于逆变器需要的输出电流小,适合选用较小的逆变器,能在电机输出转矩满足要求的条件下,使定子电流最小,减小了电机的铜耗,有利于降低系统损耗,降低系统运行成本,提高系统效率。在该方案的基础上,再采用适当的弱磁控制,可以改善电机高速运行时的性能。但是随着输出转矩的增大功率因数下降比较多。2.3.5 弱磁控制转矩增加之后,感应电动势也会随着增大,但是id0控制适合基速以下,还得给电动机更大的输入电压,电动机在电压达到最大时会达到额定转速,电压就不会再升高。如此,则需要弱
18、磁包功率运行,类似普通直流电动机。调节id和iq才能在逆变器达到电压的输出极限后继续增加转速。减小q轴电流分量及增加qd轴电流分量就能在保持电压平衡的基础上完成弱磁。由于电机相电流有极限,增加id保持相电流大小就得降低iq所以一般实现弱磁增速的方法是增加去磁电流。id的大小和去磁作用成正比,同时iq的大小和输出转矩成正比,所以弱磁控制调节电机速度时在基速度ne以上的表现为恒功率,基速以下认为恒转矩2.4 空间电压矢量调制(SVPWM技术空间电压矢量PWM与传统的正弦PWM不同,它是从三相输出电压的整体效果出发,着眼于如何使电机获得理想圆形磁链轨迹。SVPWM技术与SPWM相比较,绕组电流波形的
19、谐波成分小,使得电机转矩脉动降低,旋转磁场更逼近圆形,而且使直流母线电压的利用率有了很大提高,且更易于实现数字化。交流电动机绕组的电压、电流、磁链等物理量都是随时间变化的,分析时常用时间相量来表示,但如果考虑到它们所在绕组的空间位置,也可以如图7所示,定义定子三相电压空间矢量Uao,Ubo,Uc。它们的方向始终处于各相绕组的轴线上,而大小则随时间按正弦规律脉动,时间相位互相错开的角度也是120。BuC图7.电压空间矢量由三相定子电压空间矢量相加合成的空间矢量U是一个旋转的空间矢量,它的幅值不变,是每相电压值的3/2倍。当电源频率不变时,合成空间矢量U以电源角频率为电气角速度作恒速旋转。当某一相
20、电压为最大值时,合成电压矢量U就落在该相的轴线上。用公式表示有:UUaoUboUco(2-20)与定子电压空间矢量相仿,可以定义定子电流和磁链的空间矢量UA。和so三相的电压平衡方程式相加,即得用合成空间矢量表示的定子电压方程式为:URIs(2-20)sdt当电动机转速不是很低时,忽略定子电阻R上的压降,则上式可简化为:dtUdt(2-21)(2-22)当电动机由三相平衡正弦电压供电时,电动机定子磁链幅值恒定,其空间矢量以恒速旋转,磁链矢量顶端的运动轨迹呈圆形。这样的定子磁链旋转矢量可表示为:smej1t(2-23)该式说明,当磁链幅值m一定时,U的大小与Wi成正比,或者说供电电压与频率成正比
21、,其方向是磁链圆轨迹的切线方向,如图8所示。当磁链矢量在空间旋转一周时,电压矢量也连续地按磁链圆的切线方向运动2冗弧度,其运动轨迹与磁链圆重合。这样,电动机旋转磁场的形状问题就可转化为电压空间矢量运动轨迹的形状问题来讨论。图8.旋转磁场与电压空间矢量的运动轨迹图9.三相电压源逆变器电路图9为一种典型的三相电压源逆变器的结构。图中的逆变器采用上、下管换流,功率开关器件共有八种工作状态,即VT6、VT1、VT2导通,VT1、VT2、VT3导通,vt2、vt3、vt4导通,vt3、vt4、vt5导通,vt4、vt5、vt6导通,vt5、VT6、VT1导通,VT1、VT3、VT5导通和VT2、VT4、
22、丁6导通八种状态。如把上桥臂器件导通用数字“1”表示,下桥臂器件导通用数字“0”表示,则可得逆变器的八种开关模式对应于八种电压空间矢量,这八种电压空间矢量称为基本电压空间矢量。在这八种开关状态中,有六种开关状态对应于矢量幅值为2Udc/3的非零电压空间矢量;另外两种开关状态则对应于矢量幅值为零的零电压空间矢量。当零电压空间矢量作用于电机时并不形成磁链矢量,非零电压空间矢量作用于电机时,在电机中将会形成与之相对应的磁链矢量。其中,逆变器必须满足如下条件,即:在任何时刻必须有三个开关管是导通状态,而另外三个开关管是关断状态,同一桥臂上、下两个开关管不能同时导通。六个非零的基本电压空间矢量将逆变器的
23、一个工作周期分成六个区域,称为扇区,如图10所示。每个扇区对应的时间均为九/3在常规的六拍逆变器中一个扇区仅包含两个开关工作状态,实现SVPWM控制就是要把每一扇区再分成若干个对应时间Tpwm的小区间。根据不同电压矢量在不同时间作用下的线性组合可以得到所需相位的磁链增量,插入若干个线性组合的新电压空间矢量U以获得逼近圆形的磁链旋转磁场,这就是SVPWM调制的主要思想。图10.电压空间矢量的放射形式和六个扇区3.结语本文是对现代电机控制技术的一篇心得体会,由于,现代电机控制技术这门课程包含的知识有很多,因此,我就以三相永磁同步电机的矢量控制这章的内容为主完成了以上的汇报。通过本门课程的学习,我了
24、解到三相永磁电机的数学模型的建立以及相关的矢量控制,特别是SVPWM,在所看的相关的文章中有不少是介绍SVPWM的,可见其研究之广之深。本文只是对三相永磁电机矢量控制方面的一些大概的叙述,但通过学习,对三相永磁电机矢量控制有了更深的认识,并且在MATLAB/SIMULINK中做出了相应的仿真,使在本门课程学习的知识能够得到学以致用,得到了一定的实践。然而,由于本人在电机方面的知识水平以及时间上的所限制,故而,文中可能会出现一些问题,还望老师能够多多包涵。最后,非常感谢辛小南老师对我们认真的教学!参考文献1 庄伟.基于dsPIC的永磁同步电机矢量控制系统D.大连理工大学,2007.2 李骥.基于DSP的永磁同步电机矢量控制系统的研究D.武汉理工大学,2008.3 周马山.基于DSP的多相永磁同步电机矢量控制系统D.湖南大学,2004.4 周恒.基于空间矢量PWM控制的永磁同步电机驱动系统的研究D.华南理工大学,2012.5 龙明贵.永磁同步电机矢量控制分析D.西南交通大学,2012.6 汤新舟.永磁同步电机的矢量控制系统D.浙江大学,2005.7 张少华.永磁同步电机矢量控制策略研究与控制器实现D.中南大学,2008.
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
