 哈工大机械原理考研例题精解
哈工大机械原理考研例题精解

《哈工大机械原理考研例题精解》由会员分享,可在线阅读,更多相关《哈工大机械原理考研例题精解(36页珍藏版)》请在装配图网上搜索。
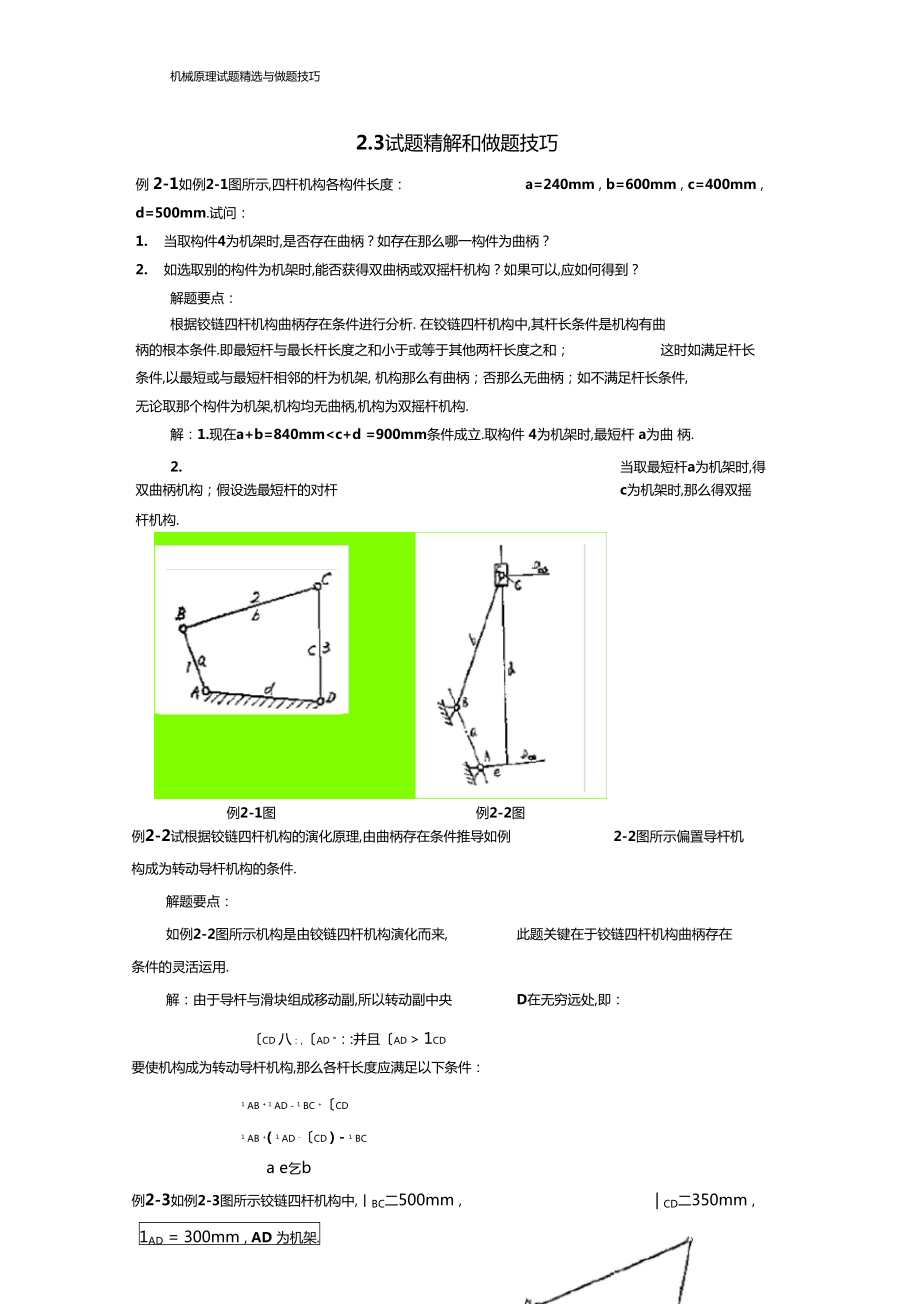
1、机械原理试题精选与做题技巧2.3试题精解和做题技巧例 2-1如例2-1图所示,四杆机构各构件长度:a=240mm , b=600mm , c=400mm ,d=500mm.试问:1. 当取构件4为机架时,是否存在曲柄?如存在那么哪一构件为曲柄?2. 如选取别的构件为机架时,能否获得双曲柄或双摇杆机构?如果可以,应如何得到?解题要点:根据铰链四杆机构曲柄存在条件进行分析. 在铰链四杆机构中,其杆长条件是机构有曲 柄的根本条件.即最短杆与最长杆长度之和小于或等于其他两杆长度之和;这时如满足杆长条件,以最短或与最短杆相邻的杆为机架, 机构那么有曲柄;否那么无曲柄;如不满足杆长条件, 无论取那个构件为
2、机架,机构均无曲柄,机构为双摇杆机构.解:1.现在a+b=840mm 1CD要使机构成为转动导杆机构,那么各杆长度应满足以下条件:1 AB + 1 AD - 1 BC +CD1 AB +( 1 AD -CD ) - 1 BCa e乞b例2-3如例2-3图所示铰链四杆机构中,丨BC二500mm ,| CD二350mm ,1AD = 300mm , AD 为机架.试问:1假设此机构为曲柄摇杆机构,且AB为曲柄,求Iab的最大值;2. 假设此机构为双曲柄机构,求Iab的最小值;3. 假设此机构为双摇杆机构,求Iab的的取值范围.解题要点:在铰链四杆机构由曲柄的条件中,其杆长条件是机构例2-3图有曲柄
3、的根本条件.假设满足杆长条件,以最短杆或与最短杆相邻的杆为机架, 机构那么有曲柄; 否那么无曲柄;假设不满足杆长条件,无论取哪个构件为机架, 机构均无曲柄,即为双摇杆机构.解:1.因AD为机架,AB为曲柄,故AB为最短杆,有Iab_Icd Iad - Ibc = 350300 - 500 = 150mmlABmax =15mm2. 因AD为机架,AB及CD均为曲柄,故 AD杆必为最短杆,有以下两种情况:假设 BC 为最长杆,那么 1 AB 1 BC - 500,且 1 AD 1 BC - 1 AB lCD故 Iab -Iad Ibc -Icd = 300 500 - 350 = 450mm得
4、45 0即AB 50 0假设 AB 为最长杆,那么 l AB l BC = 500 ,且 l ad l AB - l BC l CD故 lAB eIbc -Icd -Iad =500350 -300 = 550mm得 5 0 0: l AB 550l AB = 450mmmin3. 如果机构尺寸不满足杆长条件,那么机构必为双摇杆机构.假设l AB为最短杆,那么l AB l BC l CD l AD故lABlCDlAD lBc=350300 -500 = 150mmlA= 150mm假设1 AB为最长杆,那么1 AD 1 AB 1 BC lCD故IabIbcIbc -Iad= 500350 -
5、300 = 550mm假设Iab即不是最短杆,也不是最长杆,那么I AD + l BC A Iab * l CD故 lAB :Iad Ibc Tcd = 300500 - 350 = 450mm假设要保证机构成立,那么应有lAB :lBC Icd Iad =500 350300 =1150mm故当该机构为双摇杆机构时,| AB的取值范围为150mm A丄BC/ BCkr丄BCJab ;n _2 I二 3 lBC选作图.其中:aB2aB3B2 二 2 3 VB3B2 ,其方向为由 VB3B2 的aE由加速度影像法求出aD ,即taEDPd7=anaED大小?2 .4 l BD?方向水平E D丄E
6、D如例2-8(c)图所示为加速度图.矢量沿-.3的方向转过90.BCo- aB3 / l B - n:3b3 / l根据同一构件上加速度关系有顺时针方向a5 二 aE 二 ped方向如下图例2-9如例2-9图所示六杆机构中, lAB =140mm,lBc = Icd 二 420mm,Li = L3=420mm , L2 = 180mm,=20rad/s,BS2二S2C.试用相对运动图解法求机构在图示位置时:1. B,C,E及S2各点的速度和加速度;2 .构件2和构件3的角速度和角加速度.(a)(b)(c)例2-9图解题要点:41机械原理试题精选与做题技巧应用相对运动图解法对平面杆机构运动进行分
7、析.解:选取比例尺 7=0.01m/mm作机构运动简图,如图例2-9(a)图所示.1. 求B, C, E及S各点的速度和加速度(1)速度分析Vb = i Iab = 20 .14 = 2.8m / sVc二 VbVcb大小?方向丄CD丄AB丄BC1选取 =.1m s-/mm作速度多边形如例 2-9(b)图所示,在应用速度影像法求得E?和S?点,然后根据下式大小方向VE4:?/ EF二 VE2呀2?/ EC作图:,于是由例2-9(b)图可求得Vc =:% pc 二0.1 26=2.6m/s(沿pc方向)Ve =:% pe47110.5 =1.05m/s(沿pe4方向)VS2 :=% ps2712
8、3.7 二 2.37m/s(沿pq方向)加速度分析na - aB2lW1 1 AB2=2020.14 =56m/saC 二nactacn二aBacBa:B大小?方向C D丄 CD B A C B 丄CB式中aCB 二vCB/lBC = A2bc2/lBC =0.12 262/0.42 = 16.1m/s2n 222aC = vC /lCD =2.6 /0.42 =16.1m/s选取 叮=2m s2/mm作加速度多边形如解例2-9(c)图所示,再用加速度影像法求得e2和s2.又根据aE =aE4=二aE2+kaE4E2araE4E2大小?方向/ EF/ EC式中k2 be2262aE4E2 =
9、2 2VE4E2 = 2%e2e 2 0.121.3 = 26.4m/s 其方向为将4 24 2 lBC0.42vE4e2沿2的方向顺时针方向转过90的方向,作图如例2 9c图,由图可求得2ac 二apc=2 28= 56m/s沿 p c 方向2aE-ape4 =2 32.7 =65.4m/s 沿 pe4方向2ag = Ja p s 2 24 = 48m/s沿 p s2 方向2. 求构件2和构件3的角速度及加速度.由如例2 9a图及例2 9c图可求得%bc1 BCVc0.1 260.42二 6.2rad /s1 BC2.60.42= 6.2rad /s逆时针逆时针naCBJaccBC1BC2
10、25.2 =120rad/s0.42taC _ c c1 CD1CD2 24.8 =118.1rad /s0.42顺时针逆时针例2-10在例2-10图所示中,各构件的尺寸及机构的位置,各转动副处的摩擦圆如图中虚线圆,移动副及凸轮高副处的摩擦角为;:,凸轮顺时针转动,作用在构件4上的工作阻力为Q.试求该图示位置:1. 各运动副的反力各构件的重力和惯性力均忽略不计;2. 需施加于凸轮1上的驱动力矩 M1 ;3. 机构在图示位置的机械效率.例 2-1043机械原理试题精选与做题技巧解题要点:考虑摩擦时进行机构力的分析, 关键是确定运动副中总反力的方向.为了确定总反力的方向,应先分析各运动副元素之间的
11、相对运动,并标出它们相对运动的方向; 然后再进行各构件的受力分析,先从二力构件开始,在分析三力构件.解:选取长度比例尺(m/mm)作机构运动简图.1. 确定各运动副中总反力的方向.如例2-10(a)图,根据机构的运动情况和力的平衡条件,先确定凸轮高副处的总反力的方向,该力方向与接触点B处的相对速度VB2B1的方向成90 角.再由R51应切于运动副A处的摩擦圆,且对 A之矩的方向与-M方向相反,同 时与Ri2组成一力偶与 Mi平衡,由此定出R51的方向;由于连杆3为二力构件,其在 D, E 两转动副受两力 R23及R43应切于该两处摩擦圆,且大小相等方向相反并共线,可确定出R23及R43的作用线
12、,也即 R32及R34的方向线;总反力R52,应切于运动副C处的摩擦圆, 且对C之矩的方向应与25方向相反,同时构件 2受到Ri2 , R52及R32三个力,且应汇交 于一点,由此可确定出R52的方向线;滑块4所受总反力R54应与V45的方向成90:角,同时又受到R34, R4及Q三个力,也应汇交于一点,由此可确定出R54的方向线.2. 求各运动副中总反力的大小.分别取构件2, 4为别离体,列出力平衡方程式构件 2Ri2R32 R52 = 0构件 4R34R54 Q = 0而R34=- R43 = R23 = - R32根据上述3个力平衡方程式,选取力比例尺JF (N/mm),并作力多边形如例
13、2-10(b)图所示.由图可的总反力 R = R 4f,其中R为力多边形中第i个力的图上长度(mm).3. 求需施加于凸轮1上的驱动力矩 M由凸轮1的平衡条件可得M = R21 丄| a = JF R2vn a(Nm )式中a为R21与艮1两方向线的图上距离,单位为mm.4. 求机械效率由机械效率公式 = M 0 / M,先求理想状态下施加于凸轮1上的驱动力矩 M10,选取力比例尺jf作出机构在不考虑摩擦状态下,即f=0, : =0, =0,各运动副反力的力多边形如例 2-10(c)图所示.由图可得正压力R210的大小为R210 = R210 f(N)再由凸轮1的力平衡条件可得M 10 = R
14、210a = R210亠Faol(N m)式中a.为R210与R510两方向线的图上距离,单位为mm.故该机构在图示位置的瞬时机械效率为r = M10 / M = R210 a0 / R21 a例2-11在例2-11(a)图所示夹具中,偏心盘半径R,其回转轴颈直径d,楔角,尺寸a,b及I,各接触面间的摩擦系数f,轴颈处当量摩擦系数fv.试求:1. 当工作面需加紧力Q时,在手柄上需加的力P;2. 夹具在夹紧时的机械效率;3. 夹具在驱动力P作用下不发生自锁,而在夹紧力Q为驱动力时要求自锁的条件.(a)(b)(c)(d)例2-11图解题要点:1. 按各构件间的相对运动关系确定各运动副总反力的作用线
15、位置和方向;2. 明确机械效率的概念和计算方法;3. 只要将正行程导出的力分析计算式中的摩擦角:和摩擦圆半径变号,就可得到反行程时力的分析计算式;45机械原理试题精选与做题技巧4. 整个机构中,只要有一个运动副发生自锁,整个机构就自锁,因此,一个机构就可能有多个自锁条件;5. 在确定机构反行程的自锁条件时,还要考虑机构正行程不自锁的要求.解:1.当工作面需加紧力 Q时,在手柄上需加的力P先作各运动副处总反力作用线.因摩擦系数f和当量摩擦系数fv,故摩擦角巒=arc tanf,摩擦圆半径 = fv r = fvd /2.分析各构件在驱动力P作用下的运动情况,并作出各运动副处总反力Ri2 (R21
16、),R41,R42 ,R23 (R32),R43 的作用线,如例 2-11(a)图所示.其中总反力R41的作用线与竖直放方向的夹角1 ,可由下式求出b (I a R) tan sin : -1 cos : 丫 = 0( 1)为了求驱动力P,分别取楔块2, 3及杠杆1为别离体,并列出各力平衡方程式杠杆 1PR41R20楔块 2R12 R42 R32=0楔块 3 QR43 R2 0根据上述3个力平衡方程式,分别作出力多边形如例2-11(b)所示.由正弦定理,可得DP =旦sin(900 - sin ::)一 R21COSTJsin BR21 cos(2 :) sin(2)Q = -cosC 2)c
17、osQcos()tan(2 )cossin 0 cos(2)2. 求夹具在夹紧时的机械效率在理想状态下,f=0 ,仁=0 ,故 =0, = 0 ,代入式求得 =ardan(l /b)代入式 的理想状态下驱动力为F0 =Q tan /tan : 0故夹具在夹紧时的机械效率为二 F0/P 二 tan sin :cos(2 )/tan :0cos(:)tan(-2)cos3.求夹具在 驱动力P作用下(正行程)不发生自锁的条件由式(2)可得夹紧力Q为Psin : cos(2)cos( + P) tan (丸 + 2 )cos 由例2-11(a)可知, 1 : 900,假设要求在驱动力 P作用下机构不发
18、生自锁,那么工作阻力 Q 0,故 2: 90,故,:::90 - 2.4. 求夹具在夹紧力Q为驱动力时(反行程)自锁的条件因在机构的反行程中,各构件间的相对运动同正行程时恰好相反,各运动副处总反力R|2 ( R21), R23( R32 ), R42, R43的作用线同正行程时对称于各接触面的公法线,而也切于摩擦圆的另一侧,所以只要令正行程导出的驱动力P和Q的关系式中的摩擦角 和摩擦圆r变号,同时,驱动力 P改为阻抗力P,便可得机构在反行程夹紧力 Q与P 的关系 式- Q cos( P )tan(丸2 )cos P =sin 1 cos(2)而式中那么可由下式求得b -(I a R) tan
19、sin : - I cos : -= 0假设要求夹具在反行程自锁,那么P 0故有乞2 ;:实际上该机构在反行程时,假设R21切于或通过摩擦圆,见例2-11(d)图,那么机构也可能发生自锁.设AO连线与水平线夹角为.假设R21切于或通过摩擦圆时,那么 OC七OC = OA - CA 二 OAsin( - )一 Rsin即-a2 b2sin( ) Rsin :Rsin 可得 乞arcsin( )故反行程时该机构的自锁条件为bP + R sin 九兰2申 或arctan() = 5 兰 +arcsin(/综合正行程不自锁条件: 90 2 -和反行程自锁条件乞2或47机械原理试题精选与做题技巧arc
20、tan()乞arcsin( a? Rs ina2 b2,可得当22.5!卩f :0.4时,应满足 2 或arc tan() 一arcsin(aRsin当-22.50即卩f 0.4时,应满足arc tan() : arcsin( a Rs ina2 b2例2-12如例2-12a图所示,设计一铰链四杆机构,其摇杆 CD的行程速比系数 K=1, 摇杆的长度Icd = 150mm,摇杆的极限位置与机架所成的角度:=30和即“-90,求曲柄的长度Iab和连杆的长度Ibc .(a)(b)例2-12图解题要点:根据所给条件,正确作出机构的位置图.曲柄与连杆的两个极限位置重叠为一直线的位置.解:用图解法.步骤
21、如下:取比例尺= 0.003m/mm按条件作出摇杆 CD的两个极限位置 DC1和DC2,如例2-12b图所示._ k 1 1 1 因极为夹角 v - 181800,所以AC2与AC1重合为一直线.故连接K +11+1C1C2,使其延长线与 DA 一 DC2 交于点A,那么点A即为要求的固定铰链中央.由图可得Iac2 =Ibc Iab 二 AC2 乂 =100 0.003 = 0.3m = 300mml AC1 = l BC TAB =AG l = 50 0.003 = 0.15m = 150mm所以 lBC=225mm lAB =75mml ad 二 AD J l - 87 0.003 二 0
22、.261 m = 261mm例2-13设计如例2-13(a)图所示一曲柄滑块机构,滑块的行程速比系数K=1.5,滑块的冲程lC1C2 =50mm,导路的偏距e=20mm,求曲柄的长度lAB和连杆的长度l bc.例2-13图解题要点:根据所给条件,正确作出机构的位置图.注意曲柄滑块机构存在急回运动的两个位置.解:用图解法.步骤如下:极为夹角 v -180 /=180 但=36K +11.5+1取比例尺 = 0.001m/mm,如例2-13(b)图所示,按滑块的冲程作线段 CC2.过点G作 OC1C2 =90-90 -36 =54 ;过点C2作.OC2G =90 V -54 ;那么得00与OC2的
23、交点0.以点O为圆心,以00或 OC2作圆弧,它与直线 C1C2的平行线(距离为 e=20mm )相交于点A (应该有两个交点, 现只取一个交点),即为固定铰链中央.由例2-13(b)图可得:l Ac2 = l Be IAB = AC2 垃=68 0.001 = 0.068m = 68mml AC1 = l BC 一 l ab = AG % - 25 0.001 = 0.025m = 25mm所以l bc =46.5mm, lAB =21.5mm例2-14如例2-14图所示,设碎矿机的行程速比系数 K=1.2,颚板长度lc 300mm,颚 板摆角 =35,曲柄的长度Iab =80mm.求连杆的
24、长度,并验算最小传动角min是否在允许范围内.解题要点:根据所给条件,正确作出机构的位置图.注意机构存在急回运动的两个位置.48机械原理试题精选与做题技巧(a)(b)例2-14图解:用图解法,步骤如下:K 11 2 _1极为夹角-1801801621K+11.2+1取比例尺jl -0.01m/mm,按颚板长度 Ld和颚板的摆角作出颚板CD的两个极限 位置DC1和DC2,如例2-14(b)图所示.连接 C1C2.过点 C2 作 C2M - CC1 ;过点 0作 CN,并使.C1C2N =90, _ V - 73 39, 那么直线CM与CN相交于P.作 PC2C1的外接圆.以 C2为圆心.以长 2
25、Iab/=16mm为半径作圆弧 S2.在圆弧 C2PC1上取试一点a为圆心,并以A为半径作另一圆弧 S1,如果圆弧S1恰巧与圆弧S2相 切,那么点A即为所求的固定铰链支点.由图可得连杆长度为:l BC = BCL =30.5 0.01 = 0.305m = 305mm当机构位于图示 ABCD位置时,具有最小转动角,量得 min =44 ,在允许范围内. 例2-15在例2-13(a)图曲柄滑块机构中,滑块的行程速比系数、滑块的冲程和导路的a、b表示,试证:偏距分别以H和e表示,所求的曲柄长、连杆长度分别以11 a H21-COS.I2sin 二仝H sin 二1解题要点:关键在于找出机构中参数之
26、间的几何关系.解:滑块的行程速比系数 K,可求得机构的极位夹角 二: 180:K 1如例2-13(b)图所示,在厶A C1C2中由正弦定理得AG将前面的两关系代入得b22 a(1)又由余弦定理得 H 2(b a)2 (ba)2 2(b2-a2)c o sH (b _a)2 _e H e cosv+2 sin v由式与式解得 a =e 1cos2H(右荷)17 1 27(LscoT)2例2-16在例2-13(a)图所示曲柄滑块机构中,如偏置曲柄滑块机构,曲柄的滑块的冲程H、曲柄长a、连杆长b.试证偏心距 bd -4ab_H22H解题要点:关键在于找出机构中参数之间的几何关系.解:在例2-13(b
27、)图所示中.(b - a)?e2H = . (b a)2e22 2-(b a) -e展开得(b-a)2 -e2 2H .(b-a)2 -e2H (b-a)22-e4ab - H 22H4ab - H 2 2(-)2Hl ac =300mm,刨头的例2-17如例2-17图所示的牛头刨床的摆动导杆机构中,中央距51机械原理试题精选与做题技巧冲程H=450mm,刨头的空回行程最大速度v空(max与工作行程最大速度V工阳刃之比K= V空(max) / V工(max) =2,试求曲柄 AB和导杆CD的长度.解题要点:关键在于正确写出刨头的空回行程最大速度V空(max)和工作行程最大速度V工(max)的表
28、达式.解:如例2-17图所示的摆动导杆机构,当曲柄作匀速转动时,作往复摆动的导杆,其角速度有两个极限位置 E和F.设e 回程时导杆摆动的最大角速度;T 工作行程时导杆摆动的最大角速度.所以叩回(max)K =工(max)-F5(丨 AC - 丨 AB )(l AC l AB )又因l AC =31 AB1那么 1ab1acl ABl AC100300例2-17图1300 = 100mm3屮Icd sin2 2, H 1450 c clCD3 = 675mm2 . 2sin 2例2-18如例2-18图所示一铰链四杆机构 ABCD的固定铰链 A和D,主动件AB的三个位置 和连杆上K点所对应的三个位
29、置(尺寸从图中量取).1 .确定连杆上铰连 C的位置和连架杆 CD的长度;2. 验算其主动件是否为曲柄;3. 指出最系传动角 min的位置并确定其数值;A4. 它属于何种机构,说明之.Ar例 2-18(a)图例 2-18(b)图解题要点:此题为满足连杆预定轨迹点位置要求的四杆机构设计问题.此类题的求解正是利用了连杆上的两点 (即B点及K点)的预定位置,即为连杆 BK的预定位置来进行设计的,因给定了连杆轨迹预定的3个点位,也就是给定了连杆的3个预定位置,故仅有一解.解: 1.先取7作原图,如例2-18(b)图所示.分别连线B! ,B?心,B3K3,即得连杆的3个预定位置.此题关键是连杆BK上求出
30、铰链C的位置,故用反转法设计,作图如下:视为机架,AD为连杆,分别作DQD空乜匚.和B1K1DB3K3D ,求得D 点和D 点.再分别作连线 D D 和连线DD的中垂线,即得d23线及di3线,两线交 点即为C1点.连接B1C1及C1D,即得所设计铰链四杆机构ABCD在1位置时的机构运动简图.由图知,lCD =42mm.2. 用作图法验证,此主动件 AB能做整周转动,故 AB为曲柄.3. 因曲柄AB为主动件,当AB杆与机架AD共线时,存在最小传动角min,故作AB1C1D和AB C D两位置,并经比拟知,机构在AB C D位置时其传动角为最小,由图可知,min - BCD =444. 此机构属
31、于曲柄摇杆机构.由于由例2-18(a)图可知l ab l ad =18.5 50 68.5mm , l bc lcd = 4.5 42 = 86.5mm那么Iab Iad : lBC Icd,且杆AB为最短杆,故为曲柄摇杆机构.例2-19设计一平面连杆机构,给定条件为:主动曲柄绕轴心A作等速回转,从动件滑块 作往复移动,其动程 店2 =250口口,行程速比系数 K=1.5,其他参数如例 2-19(a)图所示.53机械原理试题精选与做题技巧1 .拟定平面连杆机构的运动简图;解题要点:按所给条件分析,选取导杆机构为根本机构.解:1.拟定平面连杆机构的运动简图计算机位夹角180K -1111118-
32、351.5 1过A点作地基面垂线交与点,以D点为顶点,以AD为角平分线 ADC1计算导杆长度E1E2C,OpDC1 sin2DC11 DC1IE1E22502sin 722 sin18mm 二 404mm 过点A作AB1垂直于C1D交于B1点,在摆杆B1处装一滑块.在连接 C1E1得一导杆机 构,例2-19(b)图所示E1C1 DAB便是所求的平面连杆机构的运动简图.2.确定机构的几何尺寸9l ab = l ad sin 150 sin 18 = 46.35mm2lDO =lDc cos 404 cos18 = 384mm1 2lMC =(350 150) -lDO =500 -384 = 1
33、16mm lC1E1 =【l2c1M |2me1 二 l 2C1M (250 250 -lc1O)2二.(116)2(500 125)2mm = 392.53mm 例2-20可折叠式座椅的机构简图如例 2-19图所示.lAF = 30mm , |Fb =12mm.假设 图示I位置为展开状态,此时 宀=110 ,冷=45 , U为折叠位状态,此时 :J =0 , 1;-2 =0.设计此机构.解题要点:设计问题源于实际,用于实际,故在设计时也不能脱离实际.有时设计命题给出的条件 齐备可以直接用所学的方法求解;而有时给定的条件少,设计参数多,这时就要根据具体情况具体分析,设计时参加合理的条件与约束,
34、使设计参数变少,到达求解目的.当解不唯一 时,应从使机构运动学、动力学特性好,保证所设计机构能实际安装和使用入手,确定最终 的设计方案.设计完后,应从设计要求着手进行校验.解:由例2-20图中可以看到,I位置时HK杆上端已经与椅背接触,即 -1角不能再大, 故可以推出AB与BC为伸直共线位,那么铰链 C必在A, B连线的延长线上,假设令 C点位于 HK上,那么可确定铰链点 C的位置C1 ,C2.为求铰链点D的位置,首先分析条件:铰链点A, B假设将椅背看作固定件,那么A, B为两固定铰链,BC, AD为连架杆.现连架杆BC的两个位置BC1 , BC?,又知AD两位置间夹角为110 ,且固定铰链A, B给定.故此设计命题变为: 给定固定铰链 A, B位置,连架杆 BC长度并给出两连架杆的两组角位置,求连架杆CD上的铰链点D.可利用钢化反转法求 D点.D1点应位于6与C2的转位点C2连线的中垂线上.考虑到实际应 用,将D1点选在C1C2中垂线与I位置线的交点 D1处,贝U ABC1D1为满足设计命题的四杆 机构在I位置时的机构简图.1P24P26P45 P464 PE1 -卩24卩26 卩12卩26 lAB 1例2-61.找出例2-6a中六杆机构的所有瞬心位置.2. 角速度比* 4厂2是多少?3. 角速度比 5厂2是多少?4. 求点C的速度.
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
