 机械原理课后答案
机械原理课后答案

《机械原理课后答案》由会员分享,可在线阅读,更多相关《机械原理课后答案(6页珍藏版)》请在装配图网上搜索。
1、第7章作业7-1等效转动惯量和等效力矩各自的等效条件是什么?7-2在什么情况下机械才会彳周期性速度波动现度波动有何危害?如何调节?答:当作用在机械上的驱动力(力矩 )周期性变化时,机械的速度会周期性波动。机械的速 度波动不仅影响机械的工作质量,而且会影响机械的效率和寿命。调节周期性速度波动的方法是在机械中安装一个具有很大转动惯量的飞轮。7- 3飞轮为什么可以调速 第七否利用飞轮来调节非周期性速度波动,为什么 ? 答:飞轮可以凋速的原因是飞轮具有很大的转动惯量,因而要使其转速发生变化.就需要 较大的能量,当机械出现盈功时, 飞轮轴的角速度只作微小上升,即可将多余的能量吸收储存起来;而当机械出现亏
2、功时, 机械运转速度减慢. 飞轮又可将其储存的能量释放,以弥补能最的不足,而其角速度只作小幅度的下降。非周期性速度波动的原因是作用在机械上的驱动力(力矩)和阻力(力矩)的变化是非周期性的。当长时问内驱动力(力矩)和阻力(力矩)做功不相等,机械就会越转越快或越转越慢.而 安装飞轮并不能改变驱动力 (力矩)或阻力(力矩)的大小也就不能改变驱动功与阻力功不相等 的状况,起不到调速的作用,所以不能利用飞轮来调节非周期陛速度波动。7-4为什么说在锻压设备等中安装飞轮可以起到节能的作用?解:因为安装飞轮后,飞轮起到一个能量储存器的作用,它可以用动能的形式把能量储存 或释放出来。对于锻压机械来说,在一个工作
3、周期中,工作时间很短.而峰值载荷很大。安 装飞轮后.可以利用飞轮在机械非工作时间所储存能量来帮助克服其尖峰载荷,从而可以选用较小功率的原动机来拖动,达到节能的目的,因此可以说安装飞轮能起到节能的作用。7- 5由式* = Wmax/( 3 m2 8 ),你能总结出哪些重要结论 (希望能作较全面的分析)? 答:当 Wmax与3 m 一定时,若8下降,则Jf增加。所以,过分追求机械运转速度的均 匀性,将会使飞轮过于笨重。由于Jf不可能为无穷大,若 WmaxW 0,则8不可能为零,即安装飞轮后机械的速度 仍有波动,只是幅度有所减小而已。当 Wmax与8 一定时,Jf与3 m的平方值成反比,故为减小 J
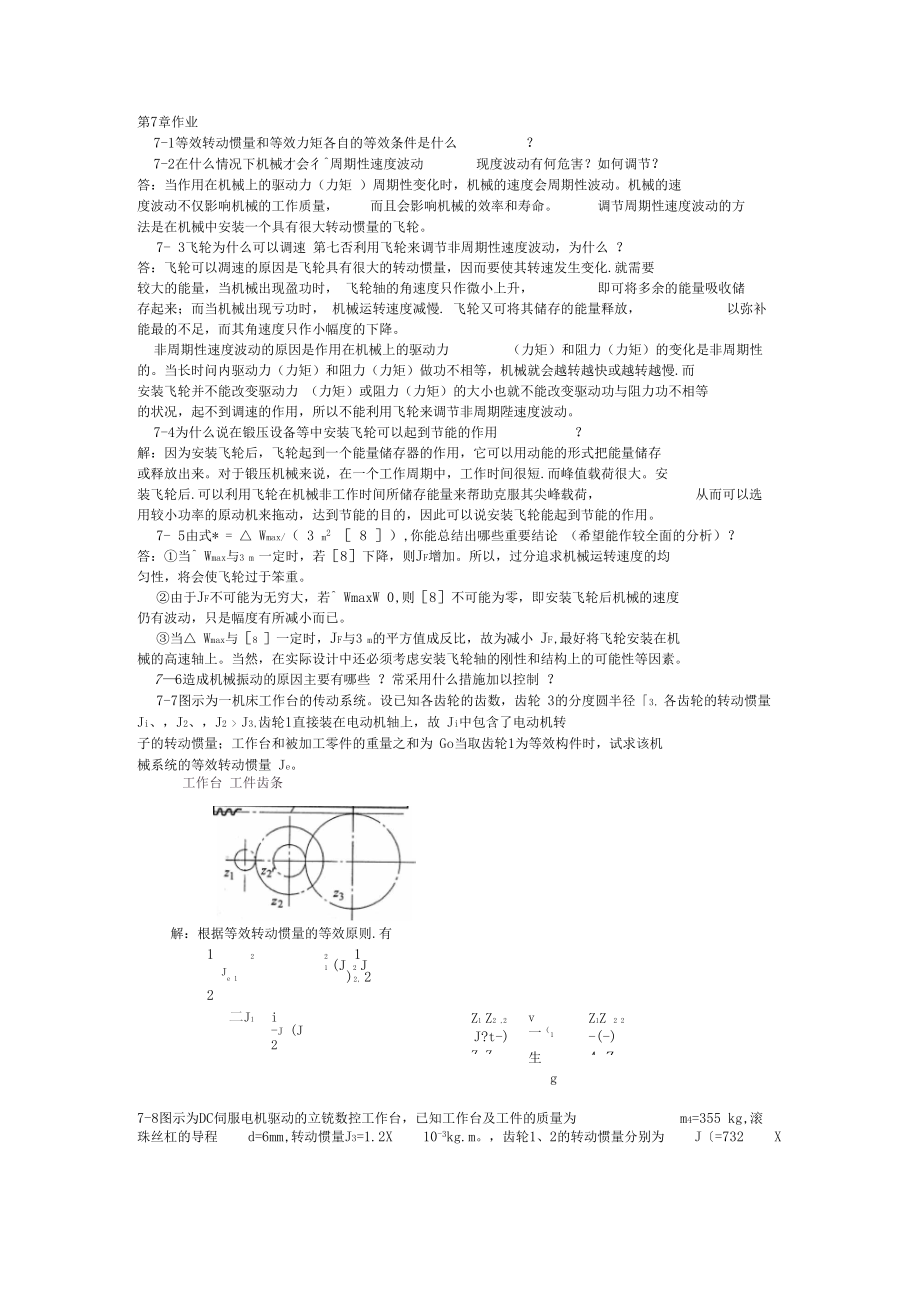
4、f,最好将飞轮安装在机 械的高速轴上。当然,在实际设计中还必须考虑安装飞轮轴的刚性和结构上的可能性等因素。76造成机械振动的原因主要有哪些 ?常采用什么措施加以控制 ?7-7图示为一机床工作台的传动系统。设已知各齿轮的齿数,齿轮 3的分度圆半径3, 各齿轮的转动惯量 Ji、,J2、,J2 J3,齿轮1直接装在电动机轴上,故 Ji中包含了电动机转 子的转动惯量;工作台和被加工零件的重量之和为 Go当取齿轮1为等效构件时,试求该机 械系统的等效转动惯量 Je。工作台 工件齿条解:根据等效转动惯量的等效原则.有12Je 12则211 (J 2 J )2, 2二J1i-j (J 2Z1 Z2 ,2J?
5、t-)Z2 Z3v一(1生gZ1Z 2 2-(-)4 Z7-8图示为DC伺服电机驱动的立铳数控工作台,已知工作台及工件的质量为m4=355 kg,滚珠丝杠的导程 d=6mm,转动惯量J3=1.2X 10-3kg.m。,齿轮1、2的转动惯量分别为 J=732 X106kg.m2, J2=768x 10 6kg.m2。在选择伺服电机时,伺服电机允许的负载转动惯量必须大于 折算到电动机轴上的负载等效转动惯量,试求图示系统折算到电动机轴上的等效转动惯量。解:根据等效转动惯量的等效原则.有1.21,21 ,、212-J e 1 1 J 1 , 1 ( J 2J)3,2 m V 4 4222212 2V4
6、 2Je =J1 J(J2J3)( 一)m4(一)则:2以通1 z1 22 z12=J1 J(J2 J3)() m,l ()2 Z2Z2=732X 10-6+(768+l 200)1 X 10-6 X (25/45) 2+355 X (6 X 10-3)2 X (25/45)2=5.284 x l0-3kg.m279已知某机械稳定运转时主轴的角速度s=100 rad /s,机械的等效转动惯量Je=0.5kg.m二-一 1n(100 , - 2000) -1n 800025(2)将式(2)改写为一 12.5t= In(100 3 2000) 1n8 000解得 co=20+80e-12.5t,制
7、动器的最大制动力矩Mr=20 N.m(制动器与机械主轴直接相连,并取主轴为等效构件)。要求制动时间不超过3s,试检验该制动器是否能满足工作要求。解因此机械系统的等效转动惯量.F:及等效力矩AL均为常数,故可利用力矩形式的机械运动方程式:Me=Jedco/dt2其中:M e=-M r=-20 N.m , Je=0.5 kg.mdt=Je/(-M r)d co =0.5/ (-20) d 3 =-0.025d 3因此 t= -0.025( 3 - 3 s)=0.025 3 s=2.5s由于t=2.5s 3s ,所以该制动器满足工作要求。7 10设有一由电动机驱动的机械系统,以主轴为等效构件时,作用
8、于其上的等效驱 动力矩 Med=10 000 100 3 (N.m),等效阻抗力矩 Mer=8 000 N.m ,等效转动惯量 Je=8 kg.m2 , 主轴的初始角速度3 0=100rad/s。试确定运转过程中角速度与角加速度”随时间的变化解由于机械系统的等效转动惯量为常数,等效力矩为速度的函数,故可利用力矩形式的机械运动方程式Me( 3 )=M ed( 3 )-M er( 3 )=J ed 3 /dt 即 10000-100 3-8000=8d co/dt8 d t = d -1 0 0,- 2 0 0 0对式积分得t _ 8 d d (1008 -2000) 100 100 (100-2
9、000)8-1n(100 -2000) -1n(100 100 - 2000)100上式对 t 求导得 a = d w /dt=-100e-12.5t7-11在图示的刨床机构中,已知空程和工作行程中消耗于克服阻抗力的恒功率分别为Pi=367.7 w和p2=3 677 w ,曲柄的平均转速 n=100 r/min,空程曲柄的转角为 ()1=1206当机构的运转不均匀系数8 =0.05时,试确定电动机所需的平均功率,并分别计算在以下两种情况中的飞轮转动惯量Jf(略去各构件的重量和转动惯量).1)飞轮装在曲柄轴上;2)飞轮装在电动机轴上,电动机的额定转速 nn=I 440 r/min。电动机通过减速
10、器驱动曲柄,为简化计算,减速器的转动惯量忽略不计。解(1)确定电动机的平均功率。作功率循环图如下图所示。根据在一个运动循环内.驱动功与阻抗功应相等,可得PT=P1t1 + P2t2P=(P1t1+P2t2)/T=(P1()1+P2(f)2)/()1+()2)=(367.7/3+3 677 X 2/3)=2 573.9 w(2)由图知最大盈亏功为:、 Wax=(P-P1)t 1=(P-P 1)(60 (f) 1)/(2 兀 n)=(2573367.7) X 60 X (1/3) X (1/100)=441.24N.m1)当飞轮装在曲柄轴上时飞轮的转动惯量为j _ 900 . :Wmax_F 二2
11、n j、 二900 441.2422 =80.473 kg.m1000.05 2)飞轮装在电机轴上时,飞轮的转动惯量为jF=jF(n/nn)2=80.473 x (100/1440)2=0.388kg.m 27-12某内燃机的曲柄输出力矩 Md随曲柄转角邛的变化曲线如图所示,其运动周期物=兀曲柄的平均转速nm =620 r/min。当用该内燃机驱动一阻抗力为常数的机械时,如果要求其运转不均匀系数6 = 0.01 o试求1)曲轴最大转速 品,、和相应的曲柄转角位置&ax ;2)装在曲轴上的飞轮转动惯量 Jf (不计其余构件的转动惯量)解:(1)确定阻抗力矩,因一个运动循环内驱动功应等于阻抗功.所
12、以有M r* T=A OABC=200 X ( 1/2) X (兀 /6+ 兀)解得Mr=(1/ Tt ) X 200X(1/2) *(兀/6+兀)=1 16.6 7 N.m(2)求曲轴最大转速nmax,和相应的曲柄转角位置。max:作其系统的能量指示图(见图(b).由图可知在 C处机构出现能量最大值.即。=4 c时,n=nmax。故 max=20o+30o+130oX (200-116.7)/200=104.16。此时 nmaX=(1+ 8/2)nm=(1+0.01/2) X620=623.1r/min. (b)(3)求装在曲轴上的飞轮转动惯量J,:Wmax - AbABc =200 -11
13、6.67 二 20 二 200 -116.67130 二 200 -116.67(一 二67.26 N .m26180200180200J F故:900 %一 22二 n 、.900 67.262-2= 1.596 kg .m二 6200.017-13图示为两同轴线的轴 1和2以摩擦离合器相连。轴1和飞轮的总质量为 100 kg,回转半径p =450 mm ;轴2和转子的总质量为 250 kg ,回转半径p =625 mm。在离合器接合 前,轴1的转速为n, =100 r/min,而轴2以n: =20 groin的转速与轴1同向转动。在离 合器接合后3 s,两轴即达到相同的速度。设在离合器接合
14、过程中,无外加驱动力矩和阻 抗力矩。试求:1)两轴接合后的公共角速度;2)在离合器结合过程中,离合器所传递的转矩的大小。解设离合器结合过程中所传递的摩擦力矩为Mf.两轴结合后的公共角速度为3。根锯力矩形式的机械运动方程。对于轴 1和轴2,分别有:d ;:二dt0 -M f = J1= J1(2)J11 J2- 20 =由式(1) (2)得:2式中J1=m1 p 1J1 J22J2 = m2 p 2CO 1=2 Tt n1/60= n m/30, 3 2=2 n n2/60= n n2/30从而JI0 = 一3022m11 n1- m22n2-2-2m1、叫:JI_ 2 21000.451000
15、.62520二二一 二 3.533 rad30_ _ 2_21000.451000.625d,22M f 一 0 二 J2 二 J 2dt3由(1)得:_21, :.? m1 ;?1M f = J1=n:(一-)3302100 0.45100 二(-3.533) =46.83830N .m7-14图示为一转盘驱动装置。1为电动机,额定功率为 Pn=0.55 kW,nn=1 390 . r/min,转动惯量 J1=0.018 kg.m2; 2 为减速器,其减速比 i2=35, 3传动,z3=20, z4=52;减速器和齿轮传动折算到电动机轴上的等效转动惯量额定转速为;、4为齿轮J2e=0.015
16、kg.rn2;转盘5的转动惯量J5=144kg.m ,作用在转盘上的阻力矩为Mr5=80 N.m ;传动装置及电动机折算到电动机轴上的阻力矩为Mr1=0.3 N.m。该装置欲采用点动(每次通电时间约0.15 s)作步进调整,问每次点动转盘5约转过多少度?提示:电动机额定转矩 Mn=9 550Pn/nn,电动机的起动转矩 常数。Mck 2Mn,并近似当作解 取电机轴作为等效构件,则系统的等效转动惯量为, : 5 2J e1 - J 1 J e2 J (5)-10.0180.015 E 4一(点动过程中,系统的运行分为两个阶段: 车阶段。第一阶段的等效力矩为5 23 5第一阶段为通电启动阶段,2k
17、gCm 0 5 0 4第二阶段为断电停5、M e11 = M c -M r1M r5()1Pn=2 9550 - - M r1 -M r5nn(土Z41)120.55=2 95501390201-0.3 -80 ( 一)=6.378 N.m5235由于在此阶段系统的等效力矩和等效转动惯量均为常数,所以在此阶段电机轴的角 速度和转过的角度为3 11=31。+ a 1t12(|)11 =(|)10+ co 10t1+(1/2) a 1t1式中:4 10=0,co 10=0, .t1 =0.15, a1=Me11/Je1 所以M e11 t1J e16.378 0.15 =18.982 rad /
18、s0.0504M e112第二阶段的等效力矩为Je126.3782,t1 = 0.5 0.15=1.424 rad0.0504,5Z3 1201M e12 - -M r1 -M r5 ()-M r1 - M r5( ) - -0.3 -80() - -1.179 N .m,1Z4 i252 35由于在此阶段系统的等效力矩和等效转动惯量均为常数,所以在此阶段电机轴的角速 度和转过的角度为:3 12= 3 11+ a 2t22(j) 12= (j) 11+3 11 t2+(1/2) a 2t2 式中:w 12=0, a 2=M e12/Je1 所以,11 ,11 Je1 18.9820.0504t2 = = = 0.811 s:2 M e21.1791M e12 21.179212 =311t212 =1.142418.9820.8110.5 0.811=9.125 rad2Je10.0504每次点动后.电机转过的角度为()1=(f)12+()11=1.424+9.125=10.549radz3 1 180201805= 1()二10.549 =6 3831、而转盘5转过的角度为:z4 i2n52 X 35冗
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
