《三菱伺服马达调机步骤概要》由会员分享,可在线阅读,更多相关《三菱伺服马达调机步骤概要(10页珍藏版)》请在装配图网上搜索。
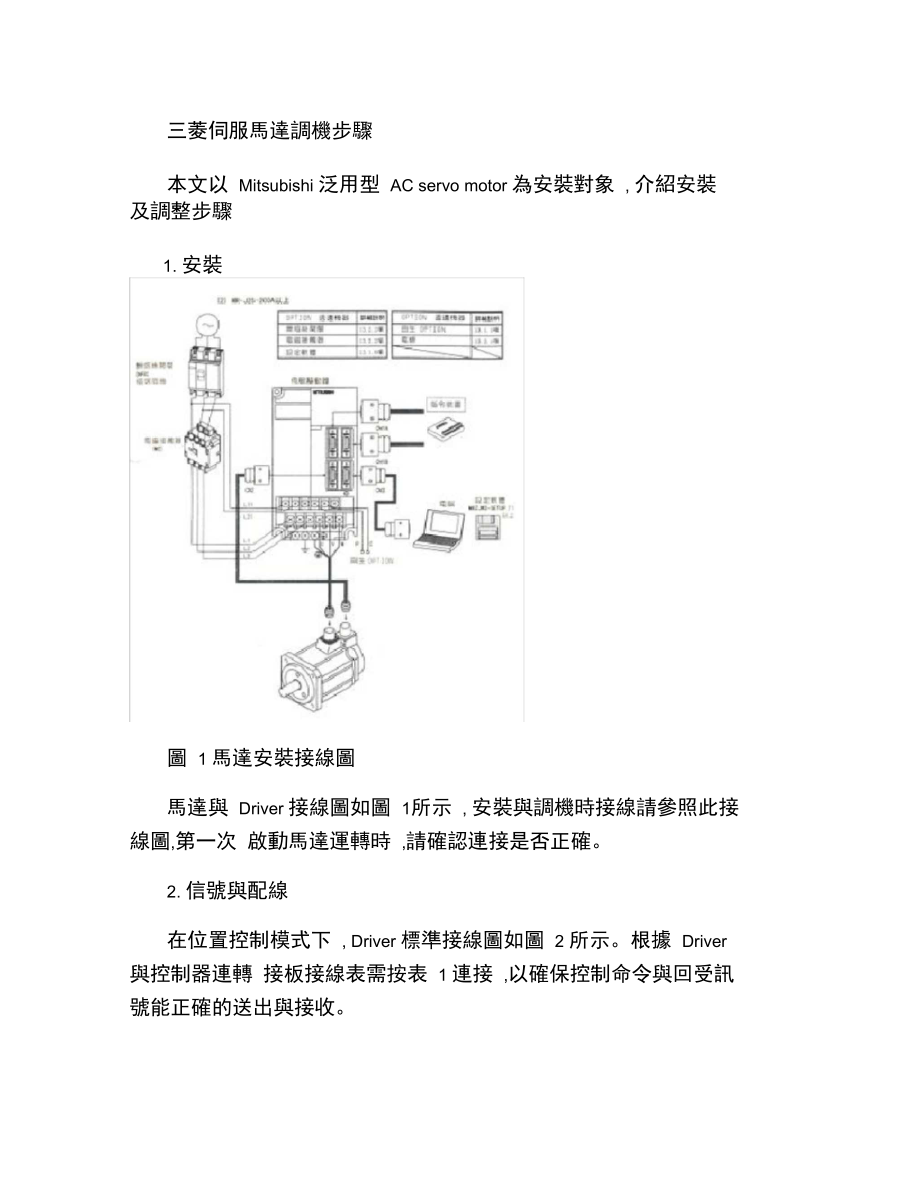
1、三菱伺服馬達調機步驟本文以 Mitsubishi 泛用型 AC servo motor 為安裝對象 , 介紹安裝 及調整步驟1. 安裝圖 1 馬達安裝接線圖馬達與 Driver 接線圖如圖 1所示 , 安裝與調機時接線請參照此接 線圖,第一次 啟動馬達運轉時 ,請確認連接是否正確。2. 信號與配線在位置控制模式下 , Driver 標準接線圖如圖 2 所示。根據 Driver 與控制器連轉 接板接線表需按表 1 連接 ,以確保控制命令與回受訊 號能正確的送出與接收。圖 2 Driver 控制訊號線接線圖 表 1 接線腳位列表3. 參數介紹Mitsubishi 泛用型 AC servo moto
2、r 可設定之參數大致可分為三個 部份,分別是基 本參數、擴張參數、擴張參數 :3.1. 基本參數基本參數共有 20 個,其內容如表 2 所示表 2 基本參數3.2. 擴張參數擴張參數共有 30個,其內容如表 3所示。 表 3 擴張參數3.3. 擴張參數擴張參數共有 27 個,其內容如表 4 所示表 4 擴張參數4. 基本運轉操作目前完成了安裝與線路連接 , 若要啟動馬達使其試運轉則還有一 些基本參數待 設定 ,根據下列順序一一調整至適應值。A. 參數 19:首先需將所有參數設定在可讀寫之狀態下 ,將參數 19設 定為 (000E, 如此便可對所有參數進行修改。B. 參數 0:在位置控制模式下
3、,視回生電阻使用狀況 (通常不使用 , 參數 0建議設 定為 (0000。C. 參數 1:機能選擇參數 ,一般使用增量系統 ,無剎車訊號時 ,使用 初始設定值 (0002。D. 電子齒輪比 :齒輪比設定使用參數 3(CMX 及參數 4(CDV,一般 計算如 (式 1 、 (式 2 所示 ,先決定機器之最小移動量 , 根據機構設 計可求出每轉所需送出之 pulse 數 1f (式 1 ,再搭配馬達之解析能力,利用 (式 2 可求得電子齒輪比。電子齒輪比設定範圍為 500501 CDVCMX 。01l n P f b ? = (式 1b P :滾珠螺桿導程。n :減速齒輪比。0l ?: 每個 pu
4、lse 移動量 (max resolution。1f :每轉輸入指令脈波CDV CMX f f 12= ( 式 2 2f :馬達編碼器每轉之解析能力 131072(pulse/revCMX : 電子齒輪分子CDV : 電子齒輪分母E. 參數 21:指定控制器輸入 Driver 之指令型態 ,可設定脈波型態及 脈波讀取之 正負邏輯 (參考圖 3 。 我們控制器所送出之 pulse 為 A/B phase ,因此 Driver 須設為 讀取 A/B phase訊號 ,且為正邏輯。圖 3 脈波及邏輯型態F. 參數 27:設定 Driver 回授至控制器每轉之脈波數或是分週比之數 值 (由參數 54決
5、定 。若參數 54設為 A/B phase脈波,則實際輸出 值為設定值之 1/4倍。G. 參數 54:設定指令脈波迴轉方向、檢出器脈波迴轉方向及檢出器 輸出選擇 , 即改變馬達正逆轉方向、回授訊號正逆轉方向與檢出 器輸出訊號為脈波或是分週 比。經過上述基本設定後 , 機器在 Servo on之狀況下應該就能夠做各 軸之運動 ,但 是請注意 ! 一開始啟動馬達時請先以慢速及較小之位移 量來運動,因為需確認馬達 運轉方向及電子齒輪比設定是否正確 ,以 防止過極限或暴衝之情形發生。試運轉時 ,有可能發生以下幾個問題 :A. 馬達運轉方向錯誤 :請由控制器伺服參數 0116或 Driver 參數 54
6、 來修改。B. 運動距離與指令距離不正確 :請確認電子齒輪比設定是否正確。C. 編碼器回授訊號方向或數值錯誤 :請由馬達參數 27與 54來修改。 5. 位置控 制基本調機流程當馬達運轉正確後 , 我們便可以針對機械特性及運轉需求來調整 馬達的性能 ,Mitsubishi 泛用型 AC servo motor 可使用馬達廠商所提 供的調機專用軟體及 Notebook 做即時的參數讀取與調整。5.1. 自動調諧機能 三菱伺服馬達提供自動調機功能之參數 (NO.2,在一般使用 環境 中,馬達調整之程序如圖 4 所示。 START 兩軸同動之補間 模式,PG1須設為 相同 2軸以上的補間 NO YE
7、S 補間模式 自動調諧模式 1 此模式只能自動 改變答應 性,首先 請使用此模式調 整 OK? OK? 此模式可自訂負 載慣量比,其餘與 自動模式 1 相同 YES 自動調諧模式 2 OK? NO 自動模式無法滿 足時 ,可手動調整 PG1,VG2,VIC 三個 參數 手動調諧模式 1 YES OK? NO YES 所有參數手動調 整 手動調諧模式 2 YES NO END 圖 4 馬達 GAIN 調整程序 建議先由完全自動調整,取得各參數之概 略值如圖 5,如果需要 11進一步做細部調整,再使用手動設定微調各參數值。手動調整時,位 置控制 模式下,所需調整的參數如表 5 所示,而調整之程序如
8、表 6 所示。 12自動調 諧機能 反覆加減速 負載慣量比是否安定 NO 自動調諧機能不足 (慣量 比推定困難 YES YES 參數 2設定為(020?固 定慣量比 NO 無震動下調整最高之 答 應性 負載慣量比是否安定 NO YES END 手動模式 圖 5 自動調機流程 13表 5 位置控制手動調整參數 編號 參數 NO.6 參數 NO.34 參數 NO.37 參數 NO.38 簡稱 PG1 GD2 VG2 VIC 說明位置控制 GAIN1 負載慣量比 速度控制 GAIN2 速度積分補償 表 6 手動調整參數流程 順序 1 2 3 4 5 6 操作 內容位置控制 GAIN1(NO.6 設小
9、 速度控制 GAIN2(NO.37 在不發生震動及異 速度控制 GAIN 設大 音情況下盡量設大。 速度積分補償 (NO.38 在不發生震動及異音 速度積分補償時間 設小 情況下盡量設小。 位置控制 GAIN1(NO.6 盡可能設大 位置控制 GAIN 設大 檢 視機械震動分析結果,加入共振率波,以 抑制機械共振 提昇答應性。 觀察整定時 間及運轉特性,作微調設定。 微調 5.2. 機械共振抑制 三菱伺服馬達提供機械共振 分析及震動抑制濾波器,機械共振分 析可使用三菱所附加之調機軟體,由其找到 機械共振點 (參考用,針 對此共振點可使用參數 58、參數 59 機械共振抑制濾波器來做適應制 振控制。經共振抑制後,理論上機械答應性便可在向上提昇。但是共振頻率在 150500Hz 以外則無效。 14
 三菱伺服马达调机步骤概要
三菱伺服马达调机步骤概要