 水箱液位自动控制系统设计
水箱液位自动控制系统设计

《水箱液位自动控制系统设计》由会员分享,可在线阅读,更多相关《水箱液位自动控制系统设计(26页珍藏版)》请在装配图网上搜索。
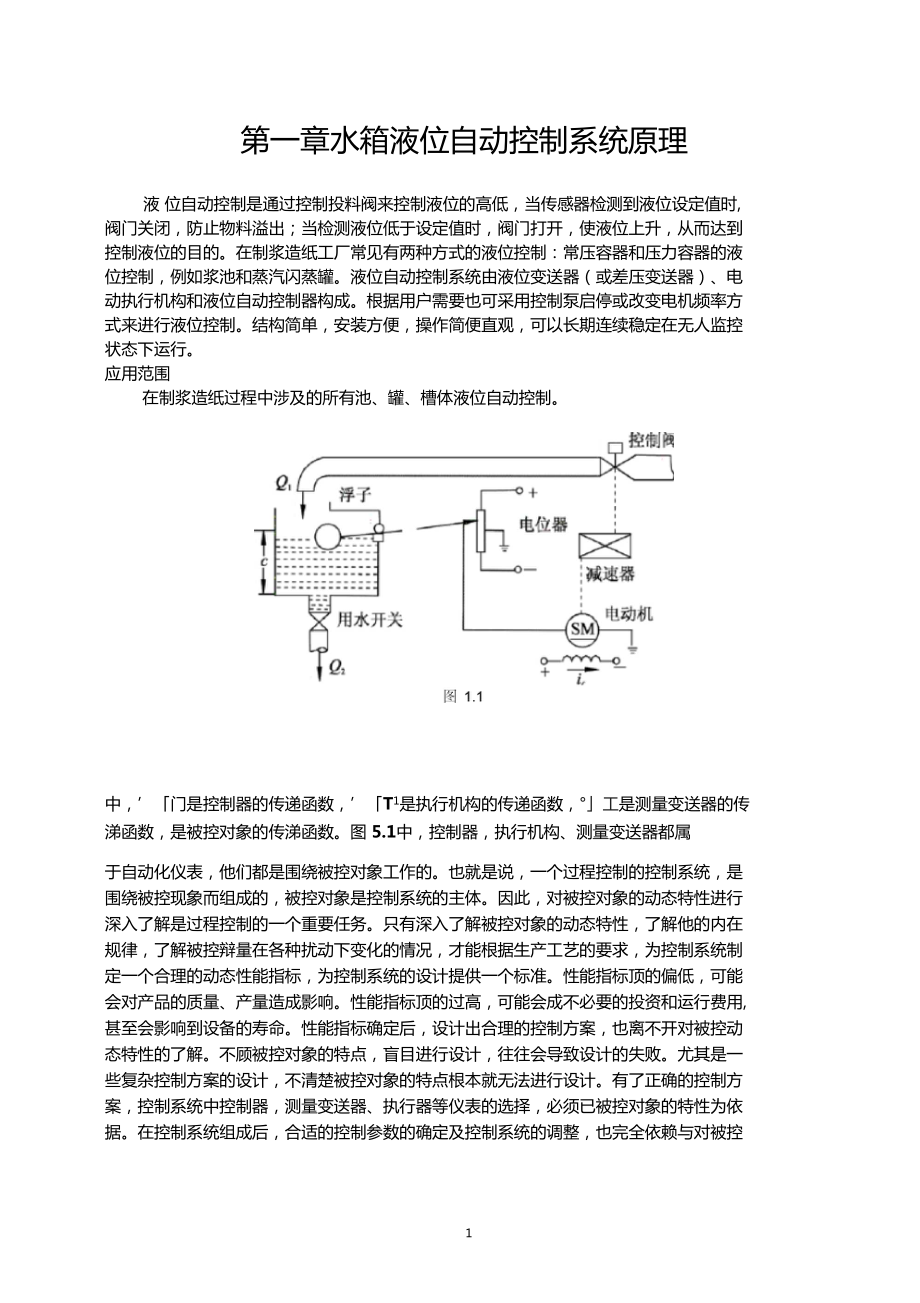
1、第一章水箱液位自动控制系统原理液 位自动控制是通过控制投料阀来控制液位的高低,当传感器检测到液位设定值时, 阀门关闭,防止物料溢出;当检测液位低于设定值时,阀门打开,使液位上升,从而达到 控制液位的目的。在制浆造纸工厂常见有两种方式的液位控制:常压容器和压力容器的液 位控制,例如浆池和蒸汽闪蒸罐。液位自动控制系统由液位变送器(或差压变送器)、电 动执行机构和液位自动控制器构成。根据用户需要也可采用控制泵启停或改变电机频率方 式来进行液位控制。结构简单,安装方便,操作简便直观,可以长期连续稳定在无人监控 状态下运行。应用范围在制浆造纸过程中涉及的所有池、罐、槽体液位自动控制。中,门是控制器的传递
2、函数,T1是执行机构的传递函数,工是测量变送器的传 涕函数,是被控对象的传涕函数。图 5.1中,控制器,执行机构、测量变送器都属于自动化仪表,他们都是围绕被控对象工作的。也就是说,一个过程控制的控制系统,是 围绕被控现象而组成的,被控对象是控制系统的主体。因此,对被控对象的动态特性进行 深入了解是过程控制的一个重要任务。只有深入了解被控对象的动态特性,了解他的内在 规律,了解被控辩量在各种扰动下变化的情况,才能根据生产工艺的要求,为控制系统制 定一个合理的动态性能指标,为控制系统的设计提供一个标准。性能指标顶的偏低,可能 会对产品的质量、产量造成影响。性能指标顶的过高,可能会成不必要的投资和运
3、行费用, 甚至会影响到设备的寿命。性能指标确定后,设计出合理的控制方案,也离不开对被控动 态特性的了解。不顾被控对象的特点,盲目进行设计,往往会导致设计的失败。尤其是一 些复杂控制方案的设计,不清楚被控对象的特点根本就无法进行设计。有了正确的控制方 案,控制系统中控制器,测量变送器、执行器等仪表的选择,必须已被控对象的特性为依 据。在控制系统组成后,合适的控制参数的确定及控制系统的调整,也完全依赖与对被控对象动态特性的了解。由此可见,在控制工程中,了解被控制的对象是必须首先做好的一 项工作。过程控制的被控对象设计的范围很广。被控对象不一定是指一个具体的设备,不少情况下 被控对象是指一个过程。有
4、些过程可能涉及好几种设备,而在有些设备内部可能包括了几 个过程。过程控制被控对象的内在机理较为复杂,由简单过程,又存在严重非线性的过程,有 多变量过程,有些被控对象的特性随时间或工作条件而变化。 对被控对象动态特性的了解, 一种方法是通过分析被控对象的工作机理,建立被控对象的数学模型。但由于连续生产过 程的复杂性,完全从机理上揭示其内在规律,获得精确的数学模型还有较大的困难。另一 种方法是工程上经常使用的方法,它采用实验法来获得被控对象的数学模型。这种方法通 过测量被控对象的阶跃相应曲线(称为飞升曲线),近似确定被控对象的数学模型,研究 被控对象的动态特性。26第二章系统元件的选择2.1 有自
5、平衡能力的单容元件如果被控对象在扰动作用下偏离了原来的平衡状态,在没有外部干预的情况下(指没 有自动控制或人工控制参与),被控变量依靠被控对象内部的反馈机理,能自发达到新的 平衡状态,我们称这类对象是有自平衡能力的被控对象。具有自平衡能力的单容对象的传递函数为(2.1)这是个一阶惯性环节。描述这类对象的参数是时间常数T和放大系数K。%)=图2.1是单容水箱的示意图。我们已经推导过水箱的传递函数为 其中T=RC C为水箱的横截面积,R为输出管道阀门的阻力。T称为水箱的时间常数 为水箱的放大系数。士一一阶系统的特性我们已经在时域分析中进行了详细的讨论, 有结论都适用于单容对象。作为过程控制的被控对
6、象,单容对象的时间常数比较大。2.2无自平衡能力的单容元件图2.2也是一个单容水箱。不同的是水箱的出口侧安装了一台水泵,这样一来,水箱的流 出水量就与水位无关,而是保持不变,即流出量的变化量丄一 o在静态下,流入水箱的流量与水泵的排水量相同都为Q水箱的水位H保持不变。在流入量有一个增量 国时,静态平衡被破坏,但流出量并不变化,水箱的水位变化规律为dh 1式中C为水箱的横截面积。对上式两端求取拉普拉斯变换,可得水箱的传递函数:酢)=1(2.2)这是一个积分环节。它的单位阶跃响应为图2.3两种水箱变化的比较(a)单容积分水箱(b)有自平衡能力的单容水箱图2.3(a)是水位变化的曲线。为了比较,我们
7、把具有惯性环节特性的水箱在单位阶跃输 入下的水位响应曲线也画出来,如图 2.3 (b)所示。很明显,具有惯性环节特性的单容水 箱,在输入作用下,水位经过一个动态过程后,可以重新达到一个新的稳定状态。而具有 积分环节的水箱在受到同样的扰动之后,水位则无限地上升,永远不会达到一个新的稳定 状态。我们称这种水箱为单容水箱。具有积分环节特性的单容对象的传递函数可以表示为1 二-;(2.3式中匚称为飞升速度。其单位阶跃响应为/(2.4)这是一条直线方程,如图2.3(a)所示。国是直线的斜率。式(2-4)说明,当被控对象原 来的平衡状态被扰动作用破坏后,如果不依靠自动控制或人工控制的外来作用,被控变量 将
8、一直变化下去,不可能达到新的平衡状态。我们称这类对象为无自平衡能力的对象。2.3单容对象的特性参数被控对象有无自平衡能力,是被控对象本身固有的特性。图55给出了两类水箱的方框图。图5-5(a)是有自平衡能力的单容水箱,从方框图中可以看出,水箱的水位既与流入 量有关,也受流出量打的制约,在被控对象内部形成了一个负反馈机制。当流入量增大 时,将引起水位的上升。水位上升的结果,流出量就会增加。流出量的增大又限制了水位 的进一步上升。经过一个动态过程后,总能重新找到一个平衡点,使流入量与流出量相等, 水位不再变化。图5-5 (b)是无自平衡能力的单容水箱,在其内部不存在负反馈机制,水 位只与流量有关。
9、具有自平衡能力的被控对象,本身对扰动有一定的克服能力,控制性能 较好。而无自平衡能力的被控对象,其传递函数的极点位于虚轴上,是不稳定的。被控变 量若要按要求的规律变化,必须完全依赖于对象外部的控制系统。图5.5两种类型的单容水箱(a)有自平衡能力(b)无自平衡能力我们曾经提到,一阶系统是含有一个存贮元件的系统。本节中我们看到,有自平衡能力无 自平衡能力的对象都含有存贮元件,为什么表现出不同的特性呢?上面,我们就其内部机 理进行分析。现在我们来看表征其特性的参数的异同 描述存贮元件存贮能力的参数称为对象的容量系数。容量系数可定义为C=被控对象储存的物质或能量的变化量/输出的变化量容量系数对不同的
10、被控对象有不同的物理意义,如水箱的横截面积,电容器的电容量。热 力系统得热容量等。在我们推导系统或环节的传递函数时,经常遇到T=RCT称为系统或环节的时间常数,它是系统或环节惯性大小的量度。式中的R称为阻力系数。 如电路的电阻,流体流动的液阻,传热过程的热阻等。被控对象的容量系数,表示了被控 对象抵抗扰动的能力,如水箱的横截面积大,同样流入量下,水位上升得就慢。电路的电 容量大,在同样充电电流下,电压上升得就慢。惯性环节的惯性,其根本原因就是因为它 具有存贮能力。但这并不是决定惯性大小的唯一因素。还有另一个因素就是阻力系数。阻 力系数是对流入存贮元件净流入量的制约。在 R-C充电电路里,它限制
11、了流入电容器的电 流,在单容水箱中,它限制了水箱的净进水量。惯性环节因为其具备了自平衡能力,在其动态参数上,用时间常数来表示,而单容积分环节则不存在阻力系数,只用容量系数就可 以表征其特性。描述有自平衡能力单容被控对象的参数有两个:放大系数K和时间常数T,称为被控对象的特性参数。放大系数K表示输入信号通过被控对象后稳态输出是输入的 K倍。对于同样 的输入信号,放大系数大,对应的输出信号就大。K表示了被控对象的稳态放大能力,是被控对象的稳态参数。T是描述被控对象惯性大小的参数,时间常数 T越大,被控对象在 输入作用下的输出变化得越慢。T是单容被控对象的动态参数。无自平衡能力的被控对象 在输入作用
12、下不会达到新的稳定状态,描述其性能的参数只有一个动态参数:飞升速度:第三章控制器参数的整定3.1参数的确定控制器参数的整定,对PID控制规律来说,就是恰当选择比例度(或比例放大系数 匚|)、 积分时间常数 仁 和微分时间常数 的值。控制器参数整定的方法有两类,一类是理 论计算法,一类是工程整定法已知被控对象较准确的数学模型,可以应用理论计算法。用传统的时域法、频率法、根轨 迹法都可以进行整定,利用计算机进行参数整定和优化的方法也很多。往往由于数学模型 的原因,理论计算得到的数据精度不高,但它却可以为工程整定法提供指导。工程整定法易于掌握,是比较实用的方法。常用的工程整定法有稳定边界法、衰减曲线
13、法、 响应曲线法等。稳定边界法又称为临界比例度法。具体过程是,先将控制器变为比例控制器 Tmm,逐渐减小比例带,直到出现等幅振荡。这是的比例度称为临界比例 度,记为 】。记下两个波峰相距的时间(临界振荡周期)匚ZI,根据和,按表3.1进行计算。表3.1稳定边界法计算公式表(衰减率 -75%)控制规律比例度*( %积分时间爼(min)微分时间(min)P血PDL陋O.ITjtPI2.2SkPID17屉0.125Tk衰减曲线法。衰减曲线法是使系统产生衰减振荡,根据衰减振荡参数来确定控制器参数。 工程上认为,衰减率7 (衰减比为4: 1 )时,系统的动态过程较适宜。因此,一般都采用4: 1衰减曲线来
14、进行整定。具体过程是:先将控制器变成比例控制器,比例度取 较大的值,给定值为阶跃函数,观察曲线的衰减情况。然后逐渐减小比例度,直到衰减比 为4 : 1,此时的比例度为 L,衰减周期为 二,如图5.34所示图3.1 4:1 衰减曲线根据5和;.,按表3.1进行计算。表3.2衰减曲线法计算表控制规律比例度( %积分时间爲(min)微分时间(min)PFD1.25sPID0.85sO.1TS响应曲线法与以上两种方法不同。以上两种方法都是在闭环系统下进行的,而响应曲线法 则要测出系统的开环阶跃响应。把控制系统从控制器输出点断开。在调节阀上加一个阶跃 输入,测量变送器的输出作为响应曲线。响应曲线一般的形
15、式如图3.2所示。根据响应曲线可近似求出如下传递函数% nW0( 0t图3.2系统的开环阶跃响应根据求出的K,T和值,按表3.3计算表3.3响应曲线计算表(衰减率0=75%)被控对象T0.2- 15控制规律S(%算伽的SC96)(mi 口)PTT.0. Q82就亍十行PI1.1X-T3.3tT.0. Q8K 亍十0,60.STPIDT仏昭KT2t0.5tT-0.08y + 0-380.31T-h0.19t0即3.2电动机的数学模型直流电动机的数学模型。直流电动机可以在较宽的速度范围和负载范围内得到连续和 准确地控制,因此在控制工程中应用非常广泛。直流电动机产生的力矩与磁通和电枢电流 成正比,通
16、过改变电枢电流或改变激磁电流都可以对电流电机的力矩和转速进行控制。在 这种控制方式中,激磁电流恒定,控制电压加在电枢上,这是一种普遍采用的控制方式。设呃为输入的控制电压 i电枢电流(且) M为电机产生的主动力矩 何忸)耐I为电机轴的角速度L为电机的电感(丹】R为电枢导数的电阻 为电枢转动中产生的反电势rw为电机和负载的转动惯量人ni根据电路的克希霍夫定理整理后d山dt2十臨害+ S二- &讐+ Mr)L=ET - JR式中:“称为直流电动机的电气时间常数;匚-心,称为直流电动机的机 电时间常数;_2_R- J ,为比例系数。直流电动机电枢绕组的电感比较小,一般情况下可以忽略不计,式(2.4 )
17、可简化为图3.3过程控制系统结构图传递函数为控制器参数的确定测的该控制系统开环阶跃响应的参数后得到的近似传递函数为%)=1= 21 $iooT+I03.4 PID控制器的参数计算T21=0.21T100T根据查表5.45 = 2.6K0.21 -0.1&0.21 + 0.88= 014 = 14%;|用十 I* 一1讯:I:!min:、11 :1 min工程整定法由于采用的是经验公式,所以对同一系统应用不同方法整定出的参数不可能 致。它们的实际控制性能指标将会有差别。第四章控制系统的校正在工业生产过程中,被控对象的特性并不是不变的。当被控对象特性发生变化后,原 定整定的PID控制参数就不是最合
18、适的参数了, 必须重新整定。这将给连续化的生产带来 不利的影响。有一种控制系统,能根据被控对象特性的变化或其他条件的变化,自动调整 控制系统的控制规律和控制器的控制参数,使控制系统始终处于最佳状态,我们称这种控 制系统为自适应控制系统。能对控制器参数进行自动整定的自适应控制系统成为自校正系 统或自整定系统。图4.1自校正系统的工作原理图4.1时自校整系统的工作原理图。自校正系统与一般控制系统相比,增加了两种功能: 一是根据控制器输出和被控对象输出分析对象的特性,即对对象进行识别;二是根据识别 结果计算并改变控制器参数,称为决策。例如假定被控对象的模型为 :对象识别环节就会根据测量的值对 K,T
19、和进行估计。决策环节则根据求出的对象参数按 规定的整定规则计算出控制器参数并对控制器参数进行修改。4.1控制器的正反作用控制系统要能正常工作,必须有一个负反馈控制系统。为了保证这一点,必须正确选 择各环节的正反作用。控制器的正反作用是根据被控变量的测量值和控制器输出之间的关 系确定的。被控变量测量值增加时,控制器的输出也增加,则控制器为正作用控制器,并 规定其稳态放大系数 =为负。被控对象的测量值增加时,控制器的输出值减小,贝U控制 器为反作用控制器,并规定器稳态放大系数泡为正。被控对象的输出与调节阀内的介质流量变化决定了被控对象的正反作用。介质流量增加,被控对象的输出也增加,则被控对象为正作
20、用,规定其放大系数上】为正。介质流量增加 时,被控对象输出减小,则被控对象为反作用,规定其放大系数口 为负。执行器气开式为正作用,气关式为反作用,并规定正作用调节阀的放大系数 为正,反 作用的乂:为负。变送器的作用一般都是正作用,其放大系数:为正。要保证系统是负反馈系统,组成系统的各环节的正反作用的乘积必须为正。这可用各环节 的放大系数来表示。即为正。这里相乘只取正符号计算,不必计算放大系数 的具体数值。选择控制器的正反作用的步骤是先根据工艺及安全要求确定调节阀正反作用,被控对象的 正反作用是固有的特性,测量变送器一般是正作用,所以往往可以排除在外,最后再选择 控制器的正反作用,使 士上门.1
21、的乘积为正。4.2串级控制系统串级控制系统是在单回路控制系统的基础上发展起来的,对改善控制系统的控制品质非常 有效,在过程控制中应用相当广泛,是一种典型的复杂控制系统。图4.2夹套反应器的温度控制(a)单回路控制(b )串级控制我们通过一个实例来说明串级控制原理。图4.3是夹套式反应釜温度控制的例子。反应釜中的放热化学反应所产生的热量必须被传输出去,以保证化学反应的温度条件。冷却水通 过夹套把反映热带走。图 4.2( a)是一个单回路控制系统。TT表示温度测量变送器,TC 表示温度控制器。这个控制系统的结构图见图4.2。影响反应釜反应温度的因素来自反应物料和冷却水两个方面,用表示物料方面的扰动
22、,用I表示冷却水方面的扰动。因 为这两个扰动的作用点不同,对反应釜温度n的影响也不一样。若冷却水发生扰动,如冷 却水入口水温度突然升高或冷却水流量突然减小,这个扰动经过夹套、反应釜的槽壁、反 应釜(反应槽)才能对凶发生影响,由于被控对象热容量大,热传递过程的惯性很大。在 -发生变化后,控制器才能开大冷却水进水调节阀,加大流量,但影响到冋又要经过一个 热传递过程。这将使反应釜的温度怛发生较大的偏差。可见单回路系统不能满足控制的要 求。由于冷却水方面的扰动会很快影响到夹套温度,如果把单回路控制系统改变成图4.2 (b) 的形式,即增加一个夹套温度控制系统,当冷却水扰动发生时,这个控制回路会立即产生
23、 控制作用,稳定t由于这个控制回路惯性小,反应快, t很快会被稳定下来,基本上不受I 扰动的影响,控制质量就大大得到改善。图4.4是这个系统的结构图图4.4所示的控制系统为串级控制系统。当被控对象具有较大的惯性和容量延迟时,若被控对象可以分为两部分,称为过程I,过程U,如图 4.5所示。过程U的输出是过程 I的输入,会对被控变量产生重大影响一般情况下,过程U的惯性较小,过程I的惯性较 大.对于这种情况,采用单回路控制方案,对发生在过程U 上的扰动,控制效果很差,采用 串级控制方式,则能收到较为满意的控制效果。串级控制系统的结构图见图4.6。串级控制系统共有2个控制回路.内部的反馈回路称为副 回
24、路。副回路包括副控制器(副调节器),调节阀,副对象(即过程U )和副变送器.发生在副 回路内的扰动称为二次扰动。外部的控制回路称为主回路.主回路包括主控制器(主调节器),整个副回路,主对象(过程I )和变送器。发生在主对象上的扰动称为一次扰动。如果 把整个副回路当成一个等效环节,它串联在主回路的前向通道上。这就是串级控制名称的 由来。串级控制在结构上有两个特点:一个特点是串级控制虽然有两个控制器,两个变送器 和两个测量参数,但仍然是一个单输入单输出系统,系统只有一个需人为设定的给定值,只 有一个控制变量(即副控制器输出),只有一个执行机构,因而也只能有一个被控变量,这一 点和单回路控制系统极其
25、相似;串级控制的另一个结构的特点是主控制器和副控制器串联 在回路中.主控制器的输出是副控制器的给定值.主控制器接受设定的给定值,所以整个串 级控制系统是一个定值调节系统副控制器的给定值是主控制器的输出,因为这个输出要 随着扰动而变化,所以副回路是一个随动系统.过程控制中还会经常遇到具有两个回路的 控制系统,只要不符合以上两个特征,就不是串级控制系统串级控制在控制品质上也有两个最显著的特点图4.7是某个串级控制系统的结构图,图 中标明了各环节的传递函数为了比较控制效果,图4.8给出了同一被控对象的单回路控制 结构图当二次扰动进入副回路后,二次扰动I至控制系统输出(称为主参数)的传递函数为途)_砌
26、。2(3)1 十 G康(3)耳(3)(?就(3)&诫(3)十(3小2归需2)0讪(3旭(3)&护&)(3!3)而单回路系统,至主参数0的传递函数为:心_砌G)万蕊二1十G;(s)G/)G祈巳1G典叭二f G( J G*(订-_坊1 (1) 一图4.8单回路控制系统dB图4.9比较两式,串级系统的传递函数分母比单回路系统大的多。这说明,串级控制系统使二次 扰动对主参数的增益明显减小,与单回路相比,二次扰动的影响可以减小10-100倍。从作用原理上看,二次扰动首先影响副对象的输出(称为副参数),副控制器立即产生控制 作用,由于副对象(或副过程)惯性较小,所以扰动的影响很快得到克服,不会对被控变 量
27、产生大的影响。串级控制的副回路对进入副回路的干扰有很强的克服能力。这是串级控 制的一个显著的特点。在设计串级控制系统时,一定要把被控对象的主要扰动包括在副回 路内。这是设计串级控制系统的根本原则。对于一次扰动,是不经过副回路的。但副回路的存在却可以使副回路的等效传递函数的 惯性大大减小,改善了系统的动态特性,加快了系统的响应速度。这是串级控制的另一个 显著特点。在串级控制中,副回路主要是为了抑制二次扰动,并不要将二次扰动完全消除, 所以精度要求并不高,副控制器选比例控制就可以了。主回路的任务是保证系统输出与给 定值一致,控制精度要求高,所以主控制器应选择比例积分(PI)或(PID)控制器。副回
28、路起“粗调”作用,要求响应快,主回路起“细调”作用,要求精度高。这是选用主副控 制器的原则。串级控制系统主副控制器参数定有多种方法。当主副对象惯性相差不大,主 副回路相互影响时,可采用逐步逼近法。即先断开主回路整定副控制器参数,然后再整定 主回路参数,接着再次在闭环下整定副回路参数。先副后主,逐步逼近,直到控制性能指 标满意。二步整定法适用于主副对象时间常数相差较大的情况。在系统闭合时先整定副回 路,然后把副回路当成一个环节,整定主回路。这种方法应用较广。现在,生产过程的新 技术、新工艺以及新型的生产设备都对自动控制提出了更高的要求。在新的控制理论指导 下的许多高级、先进的控制方式正在逐步获得
29、应用。 例如最优控制系统,自适应控制系统, 预测控制系统,智能控制系统等。第五章系统的稳定性分析5.1系统的稳定性分析已知系统的特征方程为?+6/+12?+1552+10s + 2 = 0用劳斯判据分析系统的稳定性如下126156x12-1x15 576 657応亡586 6 _50757 帀6507 58 57 f576638185071026x10-1x2 _ 58 6 $57x 2-6x 0邑= 257T5757显然,劳斯表第一列系数符号相同,故系统是稳定的5.2控制系统的稳态误差开环传递函数表示为mk n + i)i恥)碑)=一酎s n戸十i) s = i式中K表示系统的开环放大系数。
30、N表示开环传递函数所包含的积分环节数。在分析控制 系统的稳态误差时,我们根据系统开环传递函数所含的积分环节数来对系统进行分类。若 N=0,即控制系统开环传递函数不含积分环节,称为0型系统。若N=l,则称为I型系统n= n,称为u型系统。现在,我们来讨论不同类型的控制系统在典型输入信号作用下的稳 态误差。单位斜坡函数输入的稳态误差 单位斜坡函数输入下控制系统的稳态误差为r 0 1十G(s)耳/定义Q * + 碑)0心(训(s)&=曲心H30则系统的稳态误差为式中,二-称为速度误差系数对于0型系统臥=i沁sGo)耳Is D mk n+=Um$ = 1stO e on e+i)s = 1=稳态误差为
31、1昭-=7- cok n +i)Kv = I 沐 3 -SYnJ3 J(耳3 + 1)S = 1二K稳态误差为式中K为系统的开环放大系数 对于U型系统mK 口 曲+ 1)Ke =曲 sq T 02 巾 2? n (恥十1)d = 1稳态误差为在单位斜坡函数输入下,0型系统的稳态误差为无穷大。这说明 0型系统不能跟踪斜坡函 数。I型系统虽然可以跟踪单位斜坡输入函数,但存在稳态误差,即I型系统对斜坡输入是 有差的。若要在单位斜坡函数作用下达到无稳态误差的控制精度,系统开环传递函数必须 含有二个以上的积分环节。通过对该系统的判断得知该系统是稳定的系统。设计对系统的各种情况进行了分析,对自 动控制理论
32、有了深刻的了解。结论此次设计重点从PID对系统进行了校正与控制,对系统的稳定性也进行了分析,对系 统所需要的部分元件也进行了必要的分析,并对部分部件建立了数学模型设计存在不足之 处是对电源的要求和电动机的要求高。此次设计对系统的时域分析与频域分析部分略了 些,因为在设计处对此已经进行了深刻的研究和谈讨。设计同时参考了一些课外质料引入 了一些新的名词,不过在文章中都有所介绍。设计弥补了在学习上的一些不足,丰富了一 些新的思路在设计之中。设计体会通过本次课程设计,学到了很多书本上没有的东西,在一个多星期的时间里,我学会了如 何在最短的时间内找到自己学要的质料这是我此次设计的一个收获,同时此次设计也丰富 了我对自动控制理论的进一步研究,了解了系统稳定性对控制系统的影响,学会了用时域 分析方法和频域分析方法对设计进行分析。同时也通过查阅相关质料,能够自己动手完成 这个设计也是让我很有收获的一方面。最后感谢老师一年来的谆谆教会。参考文献1 胡寿松自动控制原理.北京:科学出版社,2001 22 毕承恩 现代数控机床 北京:机械工业出版社,1991 23 蔡复之实用数控加工技术 北京:兵器工业出版社,1995 44 杜君文 数控技术 天津:天津大学出版社,2001 3曹琰主 数控机床应用与维修 北京:电子工业出版社,1994 36孙汉卿 数控机床维修技术 北京:机械工业出版社,2000 4
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
