 adams挖掘机建模过程及运动仿真
adams挖掘机建模过程及运动仿真

《adams挖掘机建模过程及运动仿真》由会员分享,可在线阅读,更多相关《adams挖掘机建模过程及运动仿真(18页珍藏版)》请在装配图网上搜索。
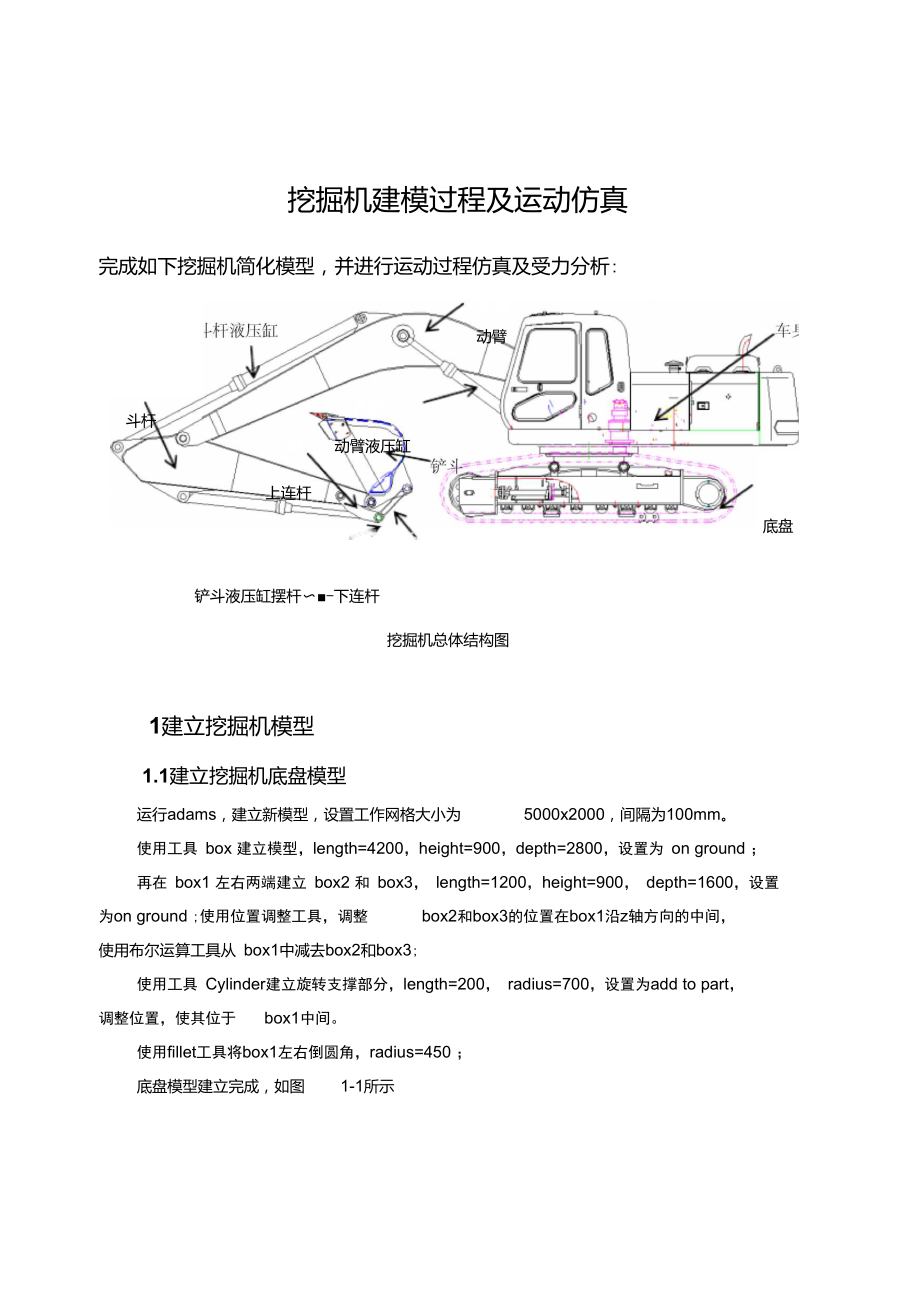
1、挖掘机建模过程及运动仿真完成如下挖掘机简化模型,并进行运动过程仿真及受力分析:动臂斗杆动臂液压缸上连杆底盘铲斗液压缸摆杆-下连杆挖掘机总体结构图1建立挖掘机模型1.1建立挖掘机底盘模型运行adams,建立新模型,设置工作网格大小为5000x2000,间隔为100mm。使用工具 box 建立模型,length=4200,height=900,depth=2800,设置为 on ground ;再在 box1 左右两端建立 box2 和 box3, length=1200,height=900, depth=1600,设置 为on ground ;使用位置调整工具,调整box2和box3的位置在b
2、ox1沿z轴方向的中间,使用布尔运算工具从 box1中减去box2和box3;使用工具 Cylinder建立旋转支撑部分,length=200, radius=700,设置为add to part, 调整位置,使其位于box1中间。使用fillet工具将box1左右倒圆角,radius=450 ;底盘模型建立完成,如图1-1所示1rTtEElLimH J图1-1挖掘机底盘1.2建立车架模型使用工具 box 建立模型,length=2400 , height=300 , depth=2200,设置为 new part;使用工具 box 建立动臂支架座,length=200 , height=90
3、0 , depth=500 ,设置为 add to part ;使用工具box建立两个动臂液压缸支架座,length=200, height=300, depth=200,设置为 add to part ;使用位置调整工具调整支架座的位置,使动臂支架与液压缸支架座x向间距500mm,两液压缸支架座 z向间距700mm动臂支架位于两液压缸支架z向中间位置;使用工具fillet对支架上侧倒圆角, radius=100;使用工具marker,在各支架座圆弧圆心沿z轴中间位置建立 marker点,液压缸支架上为 marker16、marker16,动臂支架为 marker14 ;修改模型名称为chej
4、ia ;模型完成如图1-2所示:图1- 2完成车架模型1.3建立动臂模型使用工具Extrusion建立动臂模型,选择由点创建,各点坐标如图1-3所示,length=500mm,并倒角,在动臂左端建立 marker48,右侧建立 marker18,移动使 marker18 与车架上的 marker14重合;图1- 3动臂拉伸建模坐标点使用工具box在动臂上方建立斗杆液压缸支架座,length=200 , height=4OO , depth=200 , 设置为 add to part ;使用工具cylinder在动臂两侧建立动臂液压杆支座,length=200, radius=50,使用位置工具
5、调整到合适的位置;动臂完成后如图1-4所示:图1- 4完成动臂模型1.4建立动臂液压缸使用工具 cylinder 建立液压缸,length=1200 , radius=70,液压杆 length=1200 , radius=50 ;调整位置如图1-5所示图1- 5完成动臂液压缸模型1.5建立斗杆模型使用工具Extrusion建立动臂模型,选择由点创建,各点坐标如图1-6所示, length=500mm,并倒角,在动臂右端建立 marker50,移动使 marker50与动臂上的 marker48 重合;使用工具cylinder建立摆杆连杆支座模型,length=400mm, radius=60
6、mm ;位于斗杆下方前后两侧对称布置;使用工具 box 建立铲斗液压缸支座,length=400mm, height=200mm, depth=200mm,使用位置工具调整角度和位置,并倒角radius=100mm ;斗杆完成如图1-7所示。图1- 6斗杆拉伸坐标点图1- 7完成斗杆模型1.6建立铲斗模型使用工具Extrusion建立铲斗外形模型,选择由点创建,各点坐标如图1-8所示,len gth=900mm使用工具Extrusion建立铲斗内腔模型,选择由点创建,各点坐标如图1-9所示,length=700mm,使用布尔运算工具想减完成铲斗模型,并倒角。使用工具box建立铲斗连杆支座,le
7、ngth=200,height=80,depth=1OO,调整到合适的位置,并倒角。铲斗模型完成如图1-10所示:图1- 8铲斗外形拉伸坐标点图1- 9铲斗内腔拉伸坐标点二 EI:、17i图1- 10完成铲斗模型1.7建立斗杆液压缸模型方法同1.4,完成如图1-11所示一 .-1LWj|M 1yJ -r图1-11完成斗杆液压缸模型1.8建立摆杆和连杆模型使用工具cylinder建立摆杆模型,length=700 , radius=50,调整到位;使用link工具连接摆杆和相应的支座,完成如图1-12所示图1- 12完成摆杆和连杆模型1.9建立铲斗液压缸模型方法同1.4,完成如图1-13所示,图
8、1- 13完成铲斗液压缸模型1.10模型检查,结果如下VERIFY MODEL: .model_1102 Gruebler Coun t (approximate degrees of freedom)17 Moving Parts (not in cludi ng ground)102 Degrees of Freedom for .model_1There are no redundant con stra int equatio ns.Model verified successfullymarker 点,在各 marker 点2添加约束构件一构件二约束类型底盘车架Revolute车架动
9、臂Spherical车架动臂液压缸(左)Spherical车架动臂液压缸(右)Spherical动臂动臂液压杆(左)Revolute动臂动臂液压杆(右)Cyli nder动臂斗杆液压缸Spherical斗杆斗杆液压杆Cyli nder根据挖掘机各零部件的运动关系和装配关系,建立相应的上对挖掘机各部件之间建立约束如表所示:动臂斗杆Revolute斗杆铲斗液压缸Spherical摆杆铲斗液压杆Cyli nder斗杆摆杆上连杆(左)Cyli nder斗杆摆杆上连杆(右):Cyli nder摆杆摆杆上连杆(左)Spherical摆杆摆杆上连杆(右)Hooke铲斗摆杆下连杆(左):Cyli nder铲斗
10、摆杆下连杆(右)Revolute摆杆摆杆下连杆(左)Spherical摆杆摆杆下连杆(右)Spherical斗杆铲斗Revolute液压缸(四处)液压杆(四处)Tran slati onal根据挖掘机实际工作状态,对四个移动副和车身转动副添加运动驱动如下表运动位置运动类型驱动表达式底盘与车身转动副Rotati onal joint moti on0动臂液压缸(左右)Tran slati onal joi nt moti on0斗杆液压缸Tran slati onal joi nt moti on0铲斗液压缸Tran slati onal joi nt moti on0校验模型,如下图: Inf
11、ormation图2-1模型校验结果3模拟仿真3.1挖掘机运动过程仿真通过设定 驱动表达式,来模拟挖掘机工作过程,挖掘机一个工作循环动作内容流程如下:时间0-2 s2-4 s4-6 s6-8 s8-10 s10-12 s12-14 s动作 内容伸动臂 收斗杆 收铲斗收动臂伸斗杆 伸铲斗伸动臂伸斗杆底盘转过90度收铲斗底盘反 向转过90度收斗杆 伸铲斗收动臂伸斗杆 伸铲斗动臂液压缸动作函数:STEP ( time , 0,0,2 , -200 )+STEP ( time , 2,0,4,200 )+STEP ( time , 4,0,6 , -500 )+STEP ( time , 6,0 ,
12、12,0 )+STEP ( time , 12,0 , 14,500 ) 斗杆液压缸动作函数: STEP ( time , 0 , 0 , 2 , 200 )+ STEP ( time , 2 , 0 , 4 , -100 )+STEP ( time , 4 , 0 , 6 , -100 )+STEP ( time , 6 , 0 , 10 , 0 )+STEP ( time , 10 , 0 , 12 , 100 )+ STEP ( time , 12 , 0 , 14 , -100 ) 铲斗液压缸动作函数: STEP ( time , 0 , 0 , 2 , -300)+STEP ( ti
13、me , 2 , 0 , 4 , 400 )+STEP ( time , 4 , 0 , 8 , 0 )+STEP ( time , 8 , 0 , 10 , -400 )+STEP (time, 10, 0, 14, 300) 底盘回转驱动函数: STEP ( time,6 ,0 , 8 , 90d )+STEP (time , 8 , 0 , 10 , 0 )+ STEP (time , 10 , 0 , 12 , -90d ) 设置仿真时间 14s, steps 为 1000 进行运动仿真。 3.2 挖掘过程受力分析首先修改各部件质量属性,选择user in put,分别设置动臂质量为1
14、400KG,斗杆质量为800KG,铲斗质量为400KG。设定工作过程中铲斗每次铲起 3000N 的土石,根据工作过程在 4-6s 力由零增大到最 大值,在 6-8s 保持,在 8-10s 减小到零,选择在铲斗质心添加力, run-time direction 选择 space fixed,力大小通过 step函数设定,函数为STEP( time , 4 , 0 , 6 , 3000 )+STEP( time , 8 , 0 , 10 , -3000 )选择动臂与车间连接处 marker199 测量动臂铰链受力, measure name 设为 model_1.marker_199_dongbi
15、 , characteristic 选择 force on point, component 选择 mag,单 击 ok 完成测量。选择斗杆与动臂连接处 marker53 测量斗杆铰链受力, measure name 设为 model_1.marker_53_ 斗杆, characteristic 选择 force on point, component 选择 mag,单击 ok 完成测量。选择铲斗与斗杆连接处 marker147 测量铲斗铰链受力, measure name 设为 model_1.marker_147_chandou , characteristic 选择 force on
16、point , component 选择 mag,单 击ok完成测量。在铲斗尖端添加 marker215,用于测量铲斗加速度,右击选择 measure, measure name设为 model_1.marker_215_chandouacc, characteristic 选择 translational acceleration , component 选择 mag,单击 ok 完成测量。进入后处理, data simulation 选择 last_run,source 选择 measure,在 measure 窗口 中一次选择各测量数据,点击add curves,在窗口中依次得到动臂铰链
17、受力图、斗杆铰链受力图、铲斗铰链受力图以及铲斗加速度图。并通过Plot tracking按钮,得到各测量内容的最大值。由图3-2得动臂铰链处最大力173770N,由图3-3得斗杆铰链处最大力39862N,由图3-4得铲斗铰链处最大力23248N,由图3-5得铲斗最大加速度 12687mm/s2。Data MathSimulationMeasure厂SurffG4 7_izhandDSS_dangbi也加竺15_ohandciUB eeAdd Curves|create trace spline,选择铲斗尖端 marker215创建轨迹线,如图 3-1所示。选择marker215,进行测量,y方向值为挖掘深度和高度,x方向为挖掘半径值,如图3-2所示,从图中可知挖掘机最大挖掘高度为4075.16mm,最大挖掘深度为 3701.30mm,16-10000.0O.flZ*ZZ / /F亠 0%S/ / Z-X,、FF jC / 一 h、BrB-5000.02.03J4.0Tme oec)5.D.03011-i*Q9 Jn 05一rabiu 爭 YJeptiiSfi eightLiSt_Ryn图3- 7挖掘范围测量曲线17
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
