《自动控制原理胡寿松第六版答案》由会员分享,可在线阅读,更多相关《自动控制原理胡寿松第六版答案(12页珍藏版)》请在装配图网上搜索。
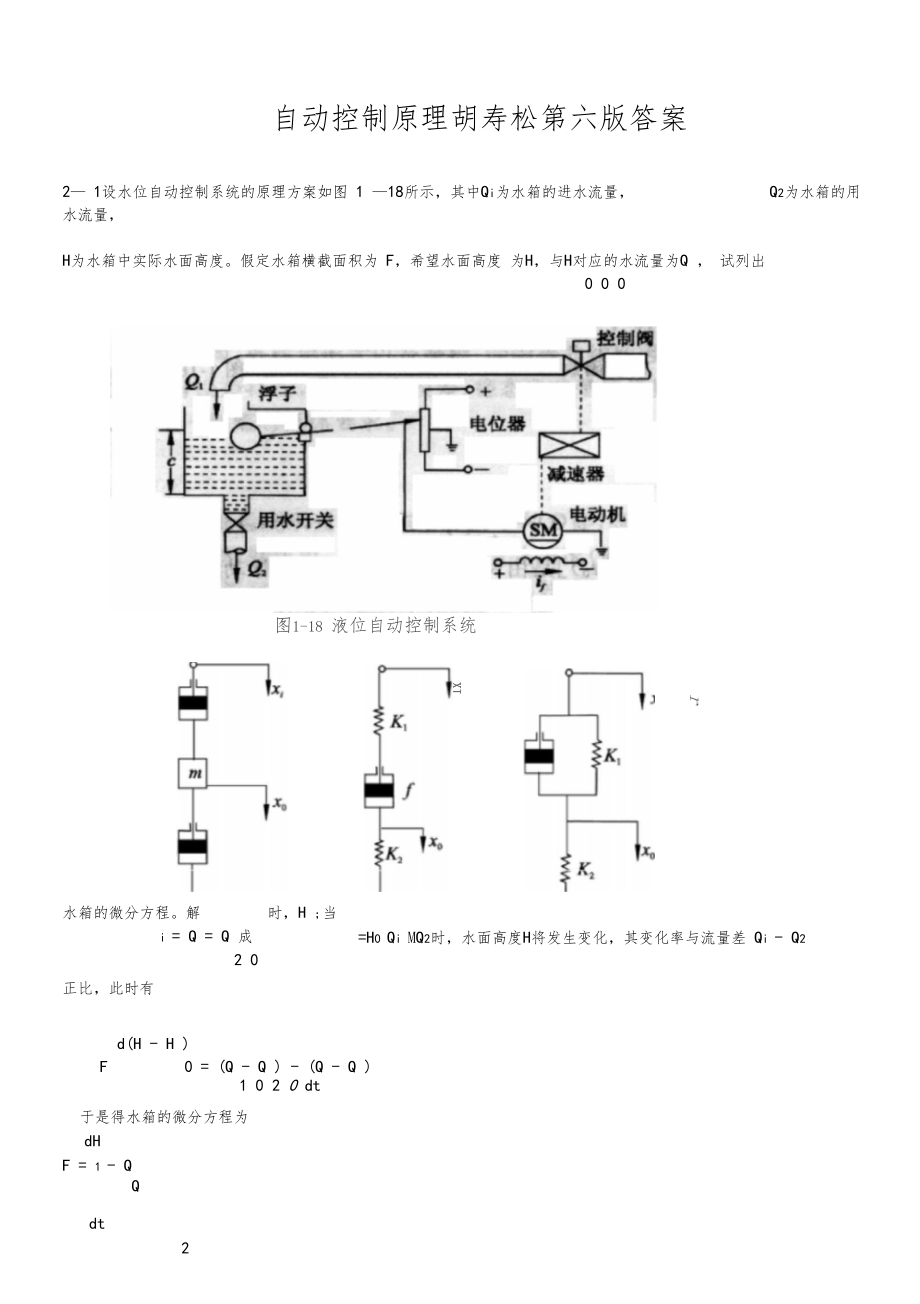
1、自动控制原理胡寿松第六版答案2 1设水位自动控制系统的原理方案如图 1 18所示,其中Qi为水箱的进水流量,Q2为水箱的用水流量,H为水箱中实际水面高度。假定水箱横截面积为 F,希望水面高度 为H,与H对应的水流量为Q , 试列出0 0 0图1-18 液位自动控制系统XI-f r2水箱的微分方程。解i = Q = Q 成2 0正比,此时有时,H ;当=H0 Qi MQ2时,水面高度H将发生变化,其变化率与流量差 Qi - Q2d(H - H )F0 = (Q - Q ) - (Q - Q )1 0 2 0 dt于是得水箱的微分方程为dHF = 1 - QQdt1222设机械系统如图257所示,
2、其中x为输入位移,x为输出位移。试分别列写各系统的微分 方程式i00257( a):由牛顿第二运动定律自动及传递函数习题S第二章解图fi (&i - & ) - f &= m&&0 2 0 0整理得d xdx dx2mi0( f + f )=+0 fdt2dt dt1 2 1将上式进行拉氏变换,并注意到运动由静止开始,即初始条件全部为零,可得 ( )() ()2ms+f f s X s = f sXs+1201 i于是传递函数为X (s) o'f f1 2Xi (s)+ +ms f1图2 57( b):其上半部弹簧与阻尼器之间,取辅助点 A,并设
3、A点位移为x,方向朝下;而在其下 半部工。引出点处取为辅助点B。则由弹簧力与阻尼力平衡的原则,从 A和B两点可以分别列出如下原始方程:K1 x x f x x )(i -) =( & -一 & 一0K2 x = f ()& -)x0消去中间变量x,可得系统微分方程dxdxf (+ K +=iK1) 0 K K x K f2 12 0 1 dtdt对上式取拉氏变换,并计及初始条件为零,得系统传递函数为X0(s)fK s KXi+ K s +(s) f (K )2图257( c) : 以ox的引出点作为辅助点'根据力的平衡原则'可列出如下原始万程:Ki (x
4、i - x) + f (X - X ) = K xi 02 0移项整理得系统微分方程dxidt上dxf 0 + (K + K (1 idt对上式进行拉氏变换,并注意到运动由静止开始,即x (0) = xo (0)= i则系统传递函数为X0(s)X (s)ifS + K1 )fs (K K+2- 3试证明图2- 58( a )的电网络与(b)的机械系统有相同的数学模型法得:"利用运算阻抗Z= R /11C1sR 1C s1+1C1s1Z2 = +R2C2s(R C21)T s +(21)C s2U(s)0 所以:U(s)Z1Z+2Z2+1)R1T1s +1(Ts2(T +1)1 s+C
5、 2s 2(T1sR1C s+1)(Ts2 +1) (T s +1)(T s1 2+1)方向朝下;根据力的平衡原则,可列出如下原始方(b)以K和f之间取辅助点A,并设A点位移为 程:1 1K2 (xi - x + f x& - x& = f x& - x&( 1)0)2(i ) 0 ( 10)K1x = f x& - x&2)所以 K2 (x - x ) + f (x& - x& ) = K x(3)i 02 i 0 1对(3)式两边取微分得K2 (x&0 ) + 2 (- 0 ) = 1(4)ix&f &
6、&&&&xixK x将(4)式代入( 1)式中得K1K xxK fx xK f xf K x xf f x x()( ) ( )0&&i- +- 1&&2+2 i( &0 - & 1 =2 i0& - & - & -0 1 1 0 1 2 i10整理上式得1 fx&f K +K f +K ffx&K1x1x+K Kxx&11&2 0= f1 f& +&&i + f K xx22x i1 2 i对上式去拉氏变换得)s + K1 2X (s
7、)1 2所以:X(s)0X(s)s2s2+ ( f K 2+1 2+ f s +2( 2f K +KK11 21)(+s1)+&01&f )s+K K1f ff21fK KK21Ks + ( + 2 )ss 12+ ( f K2+1K1 2f 1K )sf22K 1Kf2)sK 1K1K1K21)(2s +1)+K1+1+所以图2- 58( a )的电网络与(b)的机械系统有相同的数学模型24 试分别列写图 2- 59 中个无源网络的微分方程式。iC解:(a):列写电压平衡方程:duui - u = uCdtuo(=i整理得:duCR2dtR1duCd(u -idtdtdu1(
8、b):列写电压平衡方程:ui - u0 = u即:CRdtC1(1) i1(2)CduCdti = uC( 3C1uC1(1)uoR即:u+ i(4)2 C1C1C1d(u代入(ud+ 2CduC2d(uR)C1dt(4)得:dtduR)dudtduc=Cdu=C2dtd u2CdtdtC1C R- +-=-+%02C i2CCC CR200i112 12 2RRdtdtdtdt整理得:d udu ud uudu22C1+(+ 2)+ =i= +i + 2iCCR0C C RCC0 02211 21dtdt Rdt2R2dt2- 5设初始条件均为零,试用拉氏变换法求解下列微分方程式,并概略绘制
9、x( t )曲线,指出各方程式的模态。(1) 2&(t) + x(t) = t;解:对上式两边去拉氏变换得:(2s +1 X (s)(s)=1/ s2 X1114= - + s2 (2+2s +1) s s 2s 1运动模态e- 0.5 t1-t所以:x(t) = t - 2(1- e 2 )(2 ) &&(t) + & (t) + X(t) = S(t)。解:对上式两边去拉氏变换得:2(s2 + s +1)X (s) = 1 X (s)=/ 2(ss化 + +(s+1/ 2) +(s +1/ 2) +s 1) (s2运动模态e-1t/ 2sin所以:x(t) = e-t / 2tsin32(3)&&(t) + 2X (t) + x(t) = 1(t)0解:对上式两边去拉氏变换得:1 X = 1 1 11(S2 + 2s +1)X (s) = X (s) =-+ss(s + 2s + ) s s+1) s +21(2 s 1
 自动控制原理胡寿松第六版答案
自动控制原理胡寿松第六版答案