《数字摄影测量解析摄影测量的进一步发展是数字摄影测量》由会员分享,可在线阅读,更多相关《数字摄影测量解析摄影测量的进一步发展是数字摄影测量(3页珍藏版)》请在装配图网上搜索。
1、数字摄影测量:解析摄影测量的进一步发展是数字摄影测量。从广义上讲,数字摄影测量是指从摄 影测量与遥感所获取的数据中,采用数字摄影影像或数字化影像,在计算机中进行 各种数值、图像和图像处理,以研究目标的几何和物理特性,从而获得各种形式的 数字化产品和目视化产品。计算机辅助测图: 数字测图,是利用解析测图仪或具有机助系统的模拟测图仪,进行数据采集和数 据处理,测绘数字地图,制作数字高程模型,建立测量数据库。影像数字化测图:是利用计算机对数字影像或数字化影像进行处理,由计算机视觉代替人眼进行立 体量测与识别,完成影像几何与物理信息的自动提取。数字摄影测量分类:1计算机辅助测图2影像数字化测图:混合数
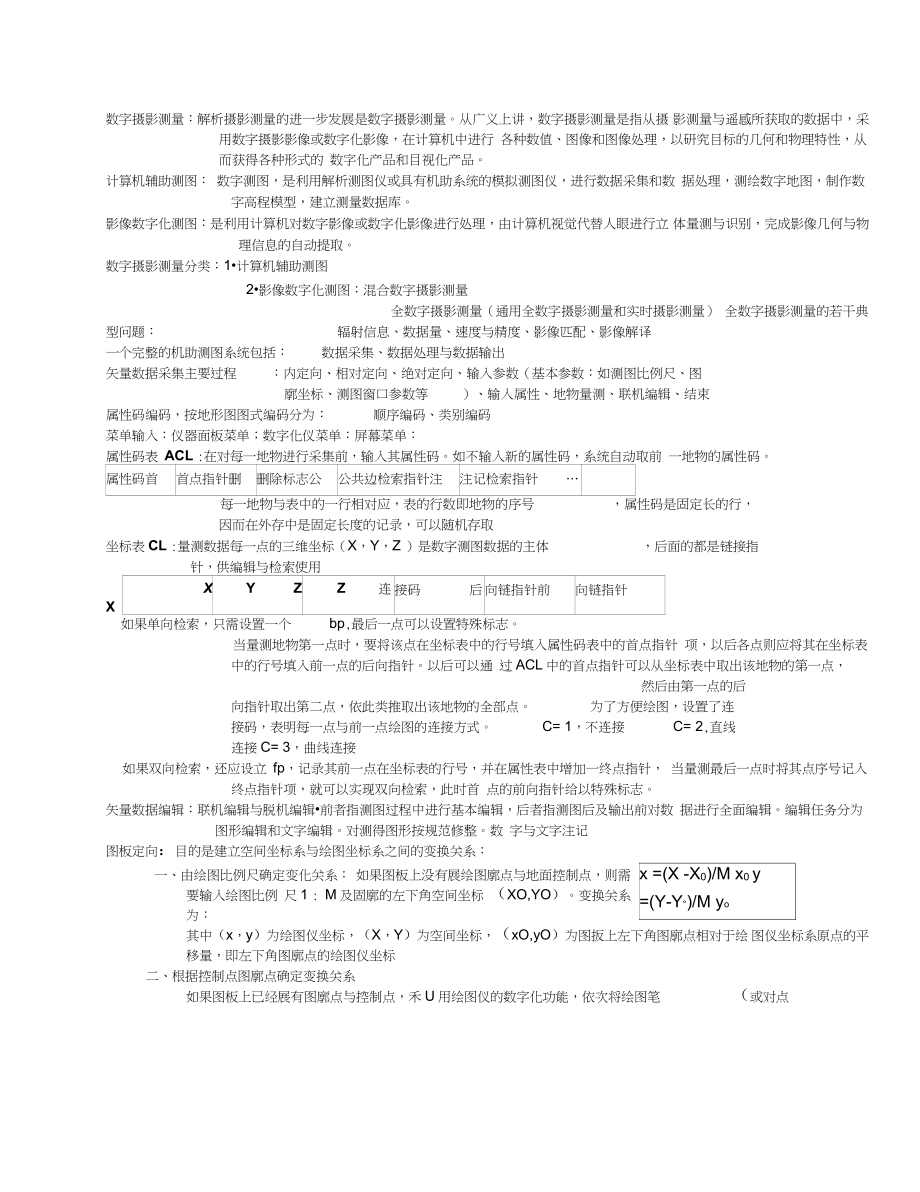
2、字摄影测量全数字摄影测量(通用全数字摄影测量和实时摄影测量) 全数字摄影测量的若干典型问题:辐射信息、数据量、速度与精度、影像匹配、影像解译一个完整的机助测图系统包括:数据采集、数据处理与数据输出矢量数据采集主要过程:内定向、相对定向、绝对定向、输入参数(基本参数:如测图比例尺、图廓坐标、测图窗口参数等)、输入属性、地物量测、联机编辑、结束属性码编码,按地形图图式编码分为:顺序编码、类别编码菜单输入:仪器面板菜单;数字化仪菜单:屏幕菜单:属性码表ACL:在对每一地物进行采集前,输入其属性码。如不输入新的属性码,系统自动取前 一地物的属性码。属性码首首点指针删删除标志公公共边检索指针注注记检索指
3、针每一地物与表中的一行相对应,表的行数即地物的序号,属性码是固定长的行,因而在外存中是固定长度的记录,可以随机存取坐标表CL:量测数据每一点的三维坐标(X,Y,Z)是数字测图数据的主体,后面的都是链接指针,供编辑与检索使用XXYZZ连 接码后向链指针前向链指针如果单向检索,只需设置一个bp,最后一点可以设置特殊标志。当量测地物第一点时,要将该点在坐标表中的行号填入属性码表中的首点指针 项,以后各点则应将其在坐标表中的行号填入前一点的后向指针。以后可以通 过ACL中的首点指针可以从坐标表中取出该地物的第一点,然后由第一点的后向指针取出第二点,依此类推取出该地物的全部点。为了方便绘图,设置了连接码
4、,表明每一点与前一点绘图的连接方式。C= 1,不连接C= 2,直线连接C= 3,曲线连接如果双向检索,还应设立fp,记录其前一点在坐标表的行号,并在属性表中增加一终点指针, 当量测最后一点时将其点序号记入终点指针项,就可以实现双向检索,此时首 点的前向指针给以特殊标志。矢量数据编辑:联机编辑与脱机编辑前者指测图过程中进行基本编辑,后者指测图后及输出前对数 据进行全面编辑。编辑任务分为图形编辑和文字编辑。对测得图形按规范修整。数 字与文字注记图板定向:目的是建立空间坐标系与绘图坐标系之间的变换关系:一、由绘图比例尺确定变化关系: 如果图板上没有展绘图廓点与地面控制点,则需要输入绘图比例 尺1:M
5、及固廓的左下角空间坐标(XO,YO)。变换关系为:其中(x,y)为绘图仪坐标,(X,Y)为空间坐标,(xO,yO)为图扳上左下角图廓点相对于绘 图仪坐标系原点的平移量,即左下角图廓点的绘图仪坐标二、根据控制点图廓点确定变换关系如果图板上已经展有图廓点与控制点,禾U用绘图仪的数字化功能,依次将绘图笔(或对点x =(X -X0)/M x0y=(Y-Y)/M yo器)对准这些点,取回其绘图仪坐标(xi,yi),由这些点的空间坐标(Xi,Yi)与绘图坐标列出误差方程式: 点状符号库数据结构:点状符号库由数据表与索引表组成,可以随机存取。符号库的建立有两种方式:子程序库、由绘图命令串与命令解释执行程序组
6、成。数字地图的裁剪包括两方面的内容:窗口外裁剪:是所有图形必须绘在图廓线之内,而不应超出图廓线之外; 窗口内裁剪:是一定范围的区域不允许一部分图形被绘出,如不允许任何图形穿过注记及等高线不能穿过房屋等。数字地面模型DTM(Digital Terrain Model)Miller教授1956年为了高速公路设计提出来。DTM的理论与实践由数据采集、数据处理和应用三部分组成。DTM和DEM、DHM的概念及表达方式:1、数字地面模型是地形表面形态等多种信息的一个数字表示。DTM是定义在某一区域D上的m维向量有限序列:优点:存贮量最小,容易管理缺点:有时不能准确表示地形的结构与细部即等高线不能准确的表示
7、地貌。2、 数字高程模型DEM(Digital Elevation Model)或DHM(DigitalHeight Model)是表示区域D上地形的三维向量有限序列:3、TIN模型根据区域有限个点集将区域划分为相连的三角面网络,区域中任意点落在三角面的点、边上或三角形内。如果点不在顶点上,该点的高程值通常通过线性插值的方法得到TIN能较好的顾及地貌特征点、线,表达复杂的地形表面比GRID要准确,其缺点是数据大,数据结构复杂,因而使用及管理也较复杂。 不仅要存储三角形的顶点, 还要存储各三角形的邻 接关系。DEM有多种表示方式,主要包括规则矩形格网与不规则三角网等。DEM数据点的采集方法:1、
8、地面测量2、现有地图数字化(手扶跟踪数字化仪和扫描数字化仪)3、空间传感器4、数字摄影测量数字摄影测量的DEM数据采集方式:1、沿等高线采样2、规则格网采样3、剖面法(沿断面扫描)4、渐进采样5、选择采样6、混合采样7、自动化DEM数据采集DEM数据预处理:数据格式的转换、坐标系统的变换、数据的编辑、 栅格数据的矢量化转换、数据分块、子区边界的提取DEM数据压缩中常用的方法 有整型量存贮、差分映射及压缩编码等。三角网数字地面模型的构建可以建立各种非规则网的DEM,最简单是不规则三角网。最佳三角形的条件是应尽可能保证每个三角形是锐角三角形或三边的长度近似相等,避免出 现过大的钝角和过小的锐角方法
9、:一、角度判断法建立TIN二、泰森多边形与狄洛尼三角网三角网数字地面模型(TIN)的存贮形式:1、直接表示网点邻接关系的结构2、 直接表示三角形及邻接关系的结构3、 混合表示网点及三角形邻接关系的结构4、TIN的压缩存贮数字影像自动测图的方式:基于电子相关的自动化测图、基于光学相关的自动化测图基于数字相关的自动化测图数字影像是一个灰度矩阵g:矩阵的每一个兀素g(j,i)是一个灰度值,对应着光学影像或实体的一个微小区域,称为像元或 像素。g =g。,。g1,0g0,1g1,1g0,n1g1 ,n gm4,0gm-1,1gm1,n1X =a+ajXi+a2Y yi =bbiXibzYW,i“2,n
10、VHX,Y,Z),iT2,r数字影像采样:对实际连续函数模型离散化的量测过程数字影像量化:影响的灰度量化是把采样点上的灰度数值转换成为某一种等距的灰度级。数字影像传感器方式:电子扫描器、电子-光学扫描器、固体阵列式数字化器数字影像传感器的检校常用的数学模型有:仿射变换,双线性变换,投影变换,高阶相似变换。数字影像重采样: 当欲知不位于矩阵(采样)点上的原始函数g(x,y)的数值时就需进行内插,此时称为,即在原采样的基础上再一次采样。方法:最邻近内插法、双线性内插法、双三次卷积法、双像素重采样第二章数字影像解析基础数字影像内定向:为了从数字影像中提取几何信息,必须建立数字影像中的像元素与所摄物体
11、表面 相应的点之间的数学关系。称为 。内定向的基本步骤:1.框标的识别与定位: 最简单的方法将框标周围的影像显示在计算机屏幕上,利用鼠标给定其近似位置,再由系统精确定位。同时,框标具有一定的几何形状,可以利用自动 识别框标的方法。2.确定变形参数:xy是独立的,实际求解先将框标坐标重心化,若已知某个像点像片坐标。就可以求得IJ从数字影像中取出相应的像素核面:通过摄影基线与地面所作的平面称为核线:核面与影像面交线称为。(同名像点必定在同名核线上) 核线几何关系解析:1基于共面条件的同名核线几何关系2基于影像几何纠正的核线解析关系: 第三章影像特征的提取与定位算法算子(Operator)是表示一种
12、对函数的运算的符号。 算法:模型分析的一组可行的、确定的和有穷的规则 常用的熵(信息测度):Shannon-Wiener熵、条件熵、平方熵、立方熵 比特分割:就是用于确定哪几位比特是信号,哪几位是噪声。就是将量化后的数据分成不同的比特 位,依次取出某一比特上的值(0或1)形成二值图像。具体步骤:直方图分析、灰度值移位和压缩、比特分割、比特合成、排除量化噪声 特征是影像灰度曲面的不连续点 点特征主要指明显点,提取点特征的算子称为兴趣算子或有利算子线特征是指影像的边缘”与线”常用方法有差分算子、拉普拉斯算子、LOG算子等影像分割:就是将影像分割成若干个子区域,每个子区域都具有一定的均匀性质,对应于某一物体 或物体的某一部分。_现在可刃止武罡义悩檢分割:膨像分割即住站定側匀硒厦厦童 P 之将表示该举体的二堆像當的集合 r 分成若干个 非空子集初严 、耳并欄足下逵条件$(丨)U 1;.-TJ-/-0;(2)J,是联通的或贞接联連的;(3W 于务子区城 T.,fi P( rj = fnf但对其中任尬两牛戟两亍以 11 栢邻的子区域之 并其均匀测度度戢 Pfttffl方法:重心是像片主点。上式可写成:-1x X。IIy-y0 -JoIo
 数字摄影测量解析摄影测量的进一步发展是数字摄影测量
数字摄影测量解析摄影测量的进一步发展是数字摄影测量