 光电编码器选型及同步电机转速和转子位置测量
光电编码器选型及同步电机转速和转子位置测量

《光电编码器选型及同步电机转速和转子位置测量》由会员分享,可在线阅读,更多相关《光电编码器选型及同步电机转速和转子位置测量(4页珍藏版)》请在装配图网上搜索。
1、| 维普资讯 17| 维普资讯 死电联吗器选型廉同歩电机转递粗转子使测畳电叱传动如时年第3$理第电廊#| 维普资讯 #| 维普资讯 光电编码器选型及同步电机转速和转子位置测量于庆广刘黄王冲袁炜嘉钱炜慵张程清华大学摘要:光电轴角编码器,又称光电肃愷置传愚器是就岂传动系统中用来测羸电功机转速和转子位置的核心部 件.对绝对式、墙1ft式和期合式光电轴编码器的工作原理进行了踪述介绍了光电轴塢码器的选型原則、转子速度 的関量和转予位置的测量方搓.堆后+给出了网涉电动机璧频调逮系统中转速和转子位置测祭统的实现.关笛词:光电轴编码猛馄合式轴编码器同歩电机转于位畫iChoice of Opt icabenco
2、der and Measure of Speed and RotorPlace of Synchronou書 MotorYu Qingguang Liu Kui Wang Chong Yuan Weijia Qian Weikang Zhang ChengAbstract = Optical-encoder P which is also called photoelectric anget-position 孚opi$ tHe core device in measurement of motor speed and rotor positiun in drive system There
3、summarize the operating principle of absolute incremental and hybrid encoder* introduce the choice principle of optic呂l-EiicodEir model and the: measuring methcxl of speed and rotor position. The implementation of measuring method of rotor speed and rotor position in. variable frequency speed-reguls
4、ated system of synchronous motor is also given,Keywords: optical-encoder hybrid-encoder rotor place of synchronous motor#| 维普资讯 #| 维普资讯 渭华丸学大学 SRT项冃031T0144)1别言光电轴角编码器又称轴编码器或光电角位 置传感器光电轴编码器以高精度计量圆光楼为 检测元件,通过光电转换将输入的角位匱信息转 换成相应的数字代码,井与计算机等控制器及显 示装愷相连接,实现数字测量、数字控制与数字显 示.光电铀编码器具有较奇的性腿价格比,已 普遍应用在雷达、光电经纬
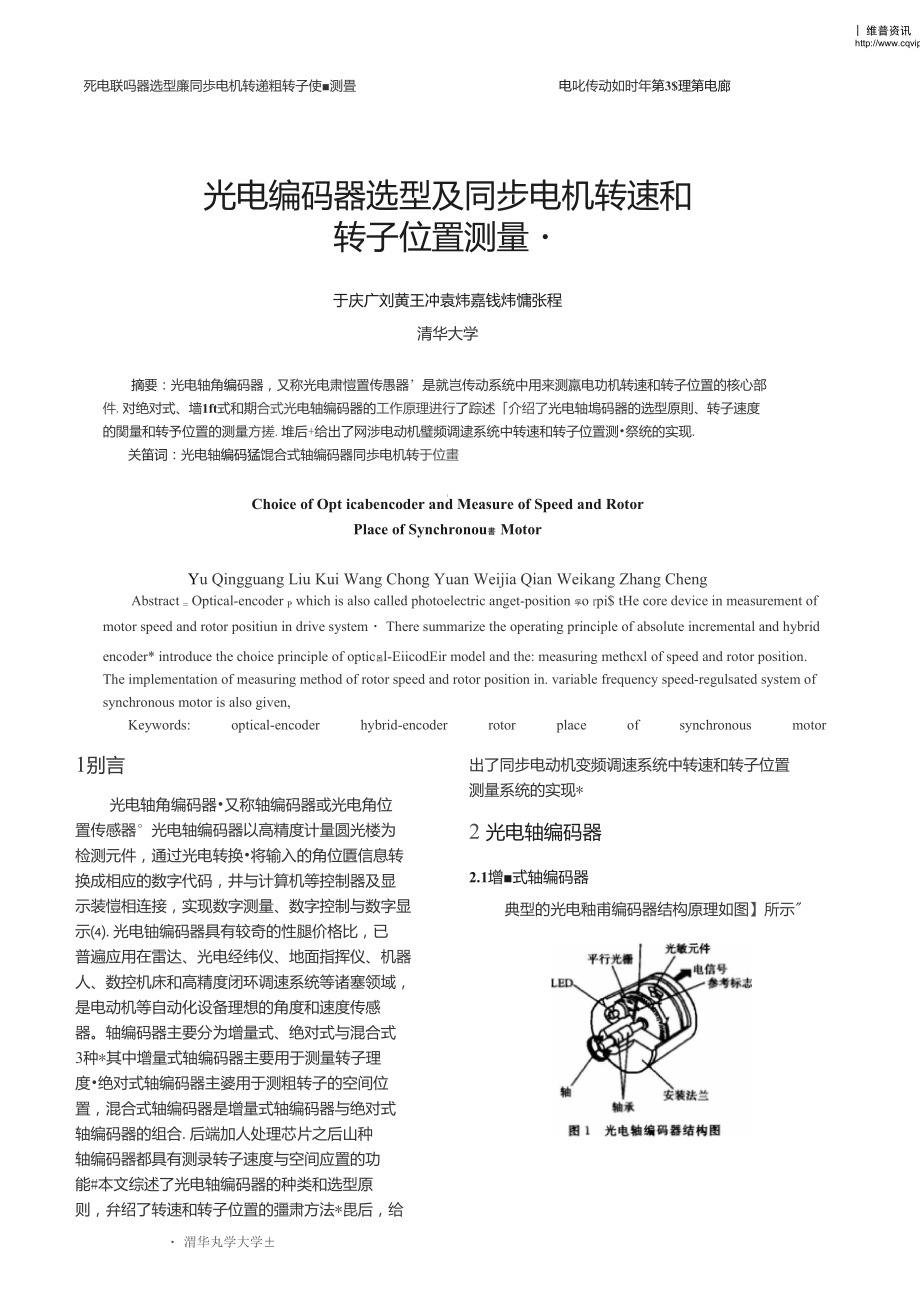
5、仪、地面指挥仪、机器 人、数控机床和高精度闭环调速系统等诸塞领域, 是电动机等自动化设备理想的角度和速度传感 器。轴编码器主要分为增量式、绝对式与混合式 3种*其中增量式轴编码器主要用于测量转子理 度绝对式轴编码器主婆用于测粗转子的空间位 置,混合式轴编码器是增量式轴编码器与绝对式 轴编码器的组合.后端加人处理芯片之后山种 轴编码器都具有测录转子速度与空间应置的功 能#本文综述了光电轴编码器的种类和选型原 则,弁绍了转速和转子位置的彊肃方法*毘后,给 出了同步电动机变频调速系统中转速和转子位置 测量系统的实现*2 光电轴编码器2.1增式轴编码器典型的光电釉甫编码器结构原理如图】所示#维晋负讯
6、电毛传动 2006年第36葺第4期尧电热码器选型及同步电机转速和转于拉査测童LED是光源光磁元件通过码嶽接受光信号输 出电信号.根据码盘结构的不同,有增竜式和绝 对式两种轴编码器增量式编码器的码盘如图2所示,码盘的刻 线间距均等*对应每一个分辨率区可,可输出一个 增虽脉冲图2堪竜武轴块码器码盘增量式轴编码器的输出波形如團3所示*增 量式编码器输出有正交脉冲两路零脉冲? 一路* 般嵋口每转输出1000-5000个 脉冲,Z端口每转输出1个脉冲。Z信号用于校 正每转编码器产生的脉冲个数,进一步将误差控 制在每一转之内,避免了积累溟差的产生。若要 区别电机转子旋转的方向,就要根据两路脉 冲信号的相位
7、来判断正转和反转*”I_ I i - n错误的概率,在高速运行的编码环境中这一点格 外重要,使用也较多。绝对式光电轴角编码器同增就式相比,具有 固定零点,输出代码是轴角的单值函数,抗干扰能 力强*掉电后再启动无须重新标定,无累积误差等 优点,因此在国防、航天等伺服和变频调速领域得 到了广泛应用.绝对式光电轴角编码器的缺点是 制造工艺复杂*不易实现小型化*2*3混合式紬编码器混合式轴编码器同时具有增量式轴编码器与 绝对式轴编码器的功能,不仅内部以格雷码编码, 输出转子的空间位置信号,井且同时还输出增量 式轴编码器所具有的脉冲信号。所以采用混合式 轴编码器可以同时测量转子的空间位置与转速。 由于混
8、合式轴编码器功能齐全*它的结构较为复 杂,所以价格相对较高.3转子速度的测量3.1 M法测转速M法测速度指在给定的时间丁内,传感器 每周产生N牛脉冲信号,读取码盘脉冲个数叫 Ell m/T计算出转速为维晋负讯 电毛传动 2006年第36葺第4期尧电热码器选型及同步电机转速和转于拉査测童(1)m NAT维晋负讯 电毛传动 2006年第36葺第4期尧电热码器选型及同步电机转速和转于拉査测童Idffl3增扯式轴编码器的输出披形增量式编码器的优点是易于实现小型化”响 应迅速,结构简单,其缺点是掉电后容易造成数据 损失且有误差累积现象。2.2绝对式轴集码器绝对式光电轴角编码器码盘(5位格雷码式 码盘)如
9、图4所示,一般使用二进制码盘或格雷码 Gray-code)盘,码盘上的码道按一定规律排列, 对应每一分辨率区间有唯一的二逬制数,因此在 不同的位置,可输出不同的数字代码。格雷码编 码的编码效率最高,相邻的两个编码只有一位数 据不同,减少了数据跳变,意味着降低了输岀编码图4绝对式轴编码器码联当时间固定时,通过统计盘脉冲个数,可以得 出转子族转过的角度,再除以时间即可得转子转 速。首尾两个盘脉冲计数时可能产生误差,误差 的大小为正负一个盘脉冲的间隔*3-2 T法测转速计时法是以一个高频信号F作为基准*传感 器毎周产生N个脉冲信号,测量两个相邻码盘脉 冲个数电机转速为n=60j当盘脉冲间隔固定时,通
10、过统计时钟脉冲个 数,可以得出转子旋转过一个盘脉冲间隔所花的 时间,由盘脉冲间隔除以时间即可得转子转速。 首尾两个时钟脉冲计数时可能产生误差,课差的 大小为正负一个时钟脉冲的间隔a3.3 M/T法测转速M/T法测量转速的方法是综合了上面两种 方法而成的e检测时间阳的长度为丁(网法测 速)之后再输出的第一个脉冲为止.即Td = T+TO| 维普资讯 光电轴码器选魁及同步电机转進和转子位置测童电毛传动2006 第越卷第4期若电机在丁(幻时间内转过X(rad)t那么 转速应是60X60Xn石兀如(7十AT)八时间内传感器产生刘 个脉冲,则角位移应是X = 2TtmjN(4)另一方面.在Td时间内可计
11、取时钟脉冲ft的脉 冲数为眄、则表示为=刚“人(5)这样,被测转速(r/min)为60/Em)Nmz3种方法中臥法在低速时分辨率不奇*丁法 在高速时分辨率低iM/T与速度几乎无关。从 精度角度而言,也是M/T法误差耳“精度高 但在低速时为保证结果的准确性、该方法蛊要较 长的检测时间出这样就无法满足转速检测系统的 快速动态响应指标,因而又岀现亍变M/T测速 袪口其原理见文献5。4 同步电动机转子位置测量4. 1采用绝対式集码器测电机转子位该方法需要庄同步电动机转子上同轴联结一 个绝对式光电编码器*为提高检测的可靠性常采用 格雷码式码盘口 5位格雷码式码盘如图4所示,该 码盘低4位输出频率依次降低
12、1/氛第5位输出频 率与第4位输出频率相同,但相位相差9,实现相 邻位置并行输出的5位二进制数只有其中一位发 生变化口同步电动机转子旋转一周,码盘输出眈 个数”即将转子一周的空间角度32等分,每一等分 用5位二进制数字编码,代表转子的空间位置。每 一个二进制数所代表的空间电甫度为3Xp/32 为电机的极对数h随着电动机的极对数增加, 码盘的分辨率降低即检测精度降低。为保证检测 梢度必须堆加编码器的位数,常采用多位(12位) 格雷码绝对式光电编码器.4,2采用绝对式编码矯测转子初始位置绝对式光世编码器转子位置检测是通过分析 码盘并行输出信号实现,然而与同步机转子同轴 联结的码盘将因安装方向不同而
13、使同转子位置 输出不同的信号,因此码盘安装后电动机运行前, 需确室转子的初始位置,即转子轴线日轴与定子 A相绕组轴线重合时码盘的输出值。该过程称为 初始定位亠初始定位是在电机空载转子励磁的情况下, 三相宦子绕组按下列要求通人直流电说 =几=0*51” /, = 0, $JB 7)式中为直流给定值,约为电机额定电流的1/囂 电动机主回路通电后,电动机将朝初始位置 旋转,且在初始位置作减幅振酱待电机静止垢, 码盘的输出值即为转子初始位置值口工作原理简 述如下。当定子绕组按式(“通人直流电醮时,由式 (E)可得宦子电流空间矢量i =#仏+ *用宙十讥一曲)= Jft式表明定子电流空闾矢It i的幅值
14、为,且 位于A轴上&由电机学可知电动机的电磁转矩 便转子朝宦子磁通矢最方向旋转口因定子电潦为 直流电流,室子磁通矢童静止不动,且初始定位时 同步电动机空载故电机停止旋转时电磁转距为 零,即出轴与A轴重合,此时码盘的输出值即为 转子初始位置值。经过多次初始定位即可确定 准确的初始位置值.4.3采用増式编码器测转子谊置使用增赴式编码器实现电机转子位置检测的 方法如下.假定它在旋转过程中给定时间T(D内給出 脉冲数目为极,则电机转速(r/min)可表示为n = 60X ?n/TX N式中为光电编码盘毎转输出的脉冲数口假定电机在静止时转子的初始位置角I电角 度)是兔,电机的扱对数为厂则从静止开始经过
15、时间丁心)后的电机转子位置(机械角)与电机速 度之间的关系为=4-(JIXT/60)X2u+ 2irX m/N(9)若用电角度表示,则为t?= + 2nXpXm/N(10)在第i个采样时间结束后,即第i个采样值为 冋=出 j +27rXpXmi/N(11)式中昇为自然数;E为第个采样周期的膝冲t十 数值亠只要知道电机转子的初始位置角烷,则转子 枉童时刻的位置都可逋过武(11)求得匚 4.4釆用増量式编码器测转子初始位采用增量式光电编码器测转子初始位置与采 用绝对式编码器测转子初始位置的原理基本相 同*同样的,初始定位是在电机空载,转子励磁的 情况下,三相定子绕组按式通人直流电流电动机主回路通电
16、后,电动机将朝初始位置 旋转艮在初始位置作减幅掘荡,待电机静止后, 记录码盘的输出脉神个数初则转子的初始位置 兔兔=2啊fN *经过多枚初始定隹,即可确定 准确的初始位置值。这里要注意*由干电机在初 始位置振荡,丙此需注意伙.的测量要采用无误 差测量的电賂结构文献出给出另一种类似同歩电动机模拟器 的同步电机转子位置的检测方法。5 FPGA的转速和转子位置的实现可编程CPLD/FPGA是用来测量转連和转 子位置的最好选择之-.图5所示为转速和转子 位置检测器原理框图,它由与电机同轴连接的光 电码批、可编程器件CPLD/FPGA等纽嵐. CPLD/FPGA接受光电轴编码器的输出,将计算 出来的转速
17、和转子位置通过光纤送给主控制器, 完成转速和转子位置闭环控制。电动机(编码器Q图勺转遠和转丁位置楡侧卷原理樞图考虑到编码器的输出方式分堆駐式和绝对式 两种,本文设计了如图6所示的CPLD/FPGA 系统.其中,增屋式部分由译码器互锁电路、正反 向计数链及可逆计数器构成。绝对式部分主要由 数据锁存器构成.对高频时钟进行分频即可得到 采样脉冲序列。当出现一采样脉冲时,锁存器1 锁存当前时刻的绝对式输出信号+等到下一次采 样脉冲出现时*锁存器2将前一时刻的信号锁存, 同时新的绝对式输出信号由锁存器1锁存。数据处理器对汁数器值或锁存器的信号进冇 处理并将处理后的转子位置和转速信号由三态 缓冲器输出,此
18、输出信号一路接数码管显示,另路经并转串电路由光纤送至主控制器.圏& CPLD/FPGA景烧的尖现本测址单元在作者研制的10 kW同步电机 变频调速系统中得到应用,效果非常好*本测量 单元也可以作为混合式编码器的测量单元、数字 式速度显示表或速度监控装置.6 结论本文综述了绝对式、增量式和混合式光电轴 编码器的工作底理和选塑原则介绍了电机转子 速度和转子拉置测量的几种方法最后,给出了 基于FPGA的同步电动机变频调速系统中转速 和转子位置测議单元的实现。1董莉莉態绘武,万秋华.光电轴角编码器的蟄展动东 JJ.光学精慟工Sf2000B(2 1198042直宏+郭抿芳.数控机床用新型位置和速度传感器
19、口. 沈阳工业大学学3王国辉绝对式轴编蚂讎应用于运动机械*面的优超 性J.光机电佶息 J99916(12)112-134曲家駅,王季佚.何服控制瑕境中的恃感器Mil匕京: 机瓶工业出版社39995李为民+姜欖+基于光电编码器的建度反馈与控制技 术J.现件电?K2004T27(23):&4-&G6伍小杰,戴幅荽建国.同步电动机转子位置捡测的一 种方挂歷实现口1电气传动*2DOb3Hl)t22-237陈嫩捷,田国璋疑转编码器的抗掛动计数电路口工电 于技术应用.2001,27( 11):70-72S朱春毅*李崇坚”于永革等*交交变鎂同步电动机转子位置检圈研究口工冶金自动化,19弓4,1肌5)用一122005*05-30.2005-07-1819
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
