 袋装物料装卸机器人臂长的优化设计
袋装物料装卸机器人臂长的优化设计

《袋装物料装卸机器人臂长的优化设计》由会员分享,可在线阅读,更多相关《袋装物料装卸机器人臂长的优化设计(7页珍藏版)》请在装配图网上搜索。
1、第3期李长春等:袋装物料装知机器人臂长的保化设计239:1671 - 3559(2007)03 0238 05袋装物料装卸机器人臂长的优化设计李长春,刘广志(济南大学 机械工穆学院山东济南250022)1994-2010 China Academic Journal Electronic Publishing House. All rights reserved, 第3期李长春等:袋装物料装知机器人臂长的保化设计2391994-2010 China Academic Journal Electronic Publishing House. All rights reserved, 第3期李长春
2、等:袋装物料装知机器人臂长的保化设计239:分析袋装物料的装卸现状提出采用5自由度关节 机器人装卸的方法。选择& 5 I的载货汽车和50 kg的水泥 袋作为装卸对象在装卸过程中机器人与车厢侧板不发生干 涉.并能列达车廂的每个位置:对机器人的大、小臂长度进行 了优化:讨论了大臂的仰角和运动性能最后得到优化后的 大、小臂长度尺寸。:袋装物料:机器人:膏长:装卸;优化:THI22: A水泥、化肥、粮食、面粉、饲料、农副产品和矿产 品等粉粒状物料大都采用袋包装运输川并且这些 物料产量巨大如2004年全国水泥总产量为9. 7亿 I其中袋装水泥产量为6 5亿8.2005年水泥产量 达到IQ 64亿b化肥产
3、量达到5220万I、粮食产量 达到4. X4亿L目前我国袋装物料的仓库搬运和装 卸运输方式主要是靠肩扛和小车拉不仅装卸工人 的劳动强度大、工作效率低.而且是在粉尘的环境下 工作,危害装卸工人的身心ft康。美国的lhe Co- luinbia Machine Inc 和 Goldco hidustries公司生产的 高位高速码垛机可以对生产线上的物料进行在线 码垛,3*4,0采用机器人装卸袋装物料具有抓取可靠、移 动灵活和摆放整齐等待点可以减小袋装物料的放 置空间便于仓储管理,并且减轻装卸工人的劳 动强度提高装卸效率,减少环境污染。袋装物料装 卸机器人既可以用在生产线上的物料搬运堆垛也 可用于汽
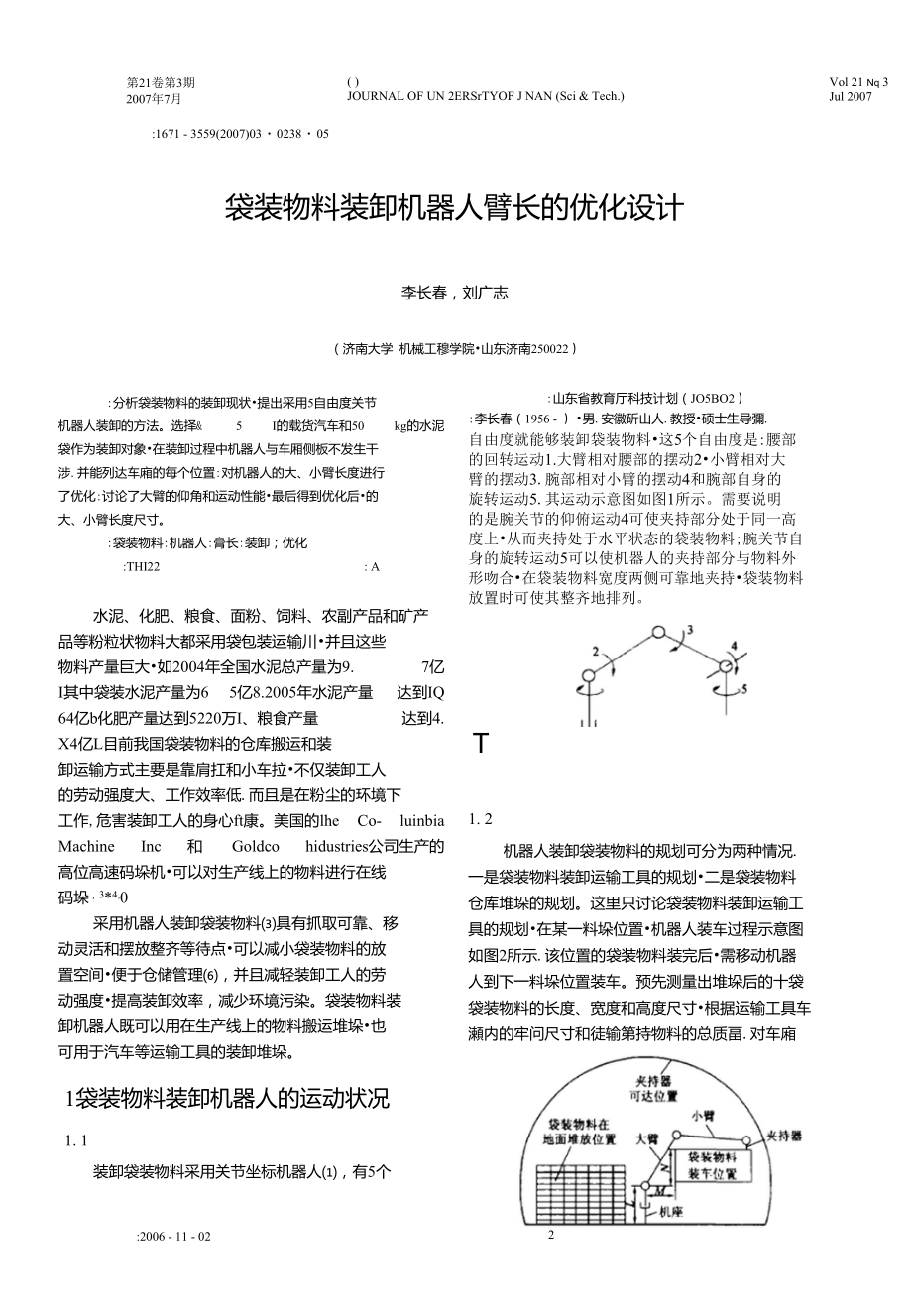
4、车等运输工具的装卸堆垛。1袋装物料装卸机器人的运动状况1. 1装卸袋装物料采用关节坐标机器人,有5个:2006 - 11 - 02:山东省教育厅科技计划(JO5BO2):李长春(1956 - ) 男.安徽斫山人.教授硕士生导彌. 自由度就能够装卸袋装物料这5个自由度是:腰部 的回转运动1.大臂相对腰部的摆动2小臂相对大 臂的摆动3.腕部相对小臂的摆动4和腕部自身的 旋转运动5.其运动示意图如图1所示。需要说明 的是腕关节的仰俯运动4可使夹持部分处于同一高 度上从而夹持处于水平状态的袋装物料;腕关节自 身的旋转运动5可以使机器人的夹持部分与物料外 形吻合在袋装物料宽度两侧可靠地夹持袋装物料 放置
5、时可使其整齐地排列。T1. 2机器人装卸袋装物料的规划可分为两种情况. 一是袋装物料装卸运输工具的规划二是袋装物料 仓库堆垛的规划。这里只讨论袋装物料装卸运输工 具的规划在某一料垛位置机器人装车过程示意图 如图2所示.该位置的袋装物料装完后需移动机器 人到下一料垛位置装车。预先测量出堆垛后的十袋 袋装物料的长度、宽度和高度尺寸根据运输工具车 瀬内的牢问尺寸和徒输第持物料的总质畐.对车廂2内部空间进行规划确定在车厢长度、宽度和高度方 向上各需要放置几袋物料。2建立机器人机构优化的数学模型2 1文中选择的运输工具是东风牌BQ1145FD19D 型载货汽车(载重量& 5 t).其车厢内部尺寸为4 S
6、OOiiun X2 294mm &60mm.袋装物料选择 50 kg的 水泥袋堆垛后水泥袋的尺寸为660 mm X42O nun X 135 mm。在车厢内长、宽、高度方向上放置水泥袋 数为(7 6 X5) 最上层只需放置30袋.在水泥袋 相互之间、水泥袋与车厢板之间留有少量间隙。2 2机器人装车时应处于水泥袋料垛与汽车车厢之 间取机器人基座与车厢侧板的距离M = 1 000mm, 如图2所示.机器人处于车厢长度方向(4 800imn) 的中间位置.在高度方向选择机器人的基座高L =1 100 mm.车厢底面距离地面高度为1200mm.这样 大臂与腰部的回转关节到车厢最上部的尺寸为N = 96
7、0 mm.夹持器和水泥袋的整个高度取为600 mm。2 3,9-,为使机器人能够将水泥袋装到车厢的每一个位 置需要机器人的大臂和小臂摆动后机器人的夹持 器能够到达摆放水泥袋的上部位置所以机器人的 大臂和小臂的长度决定了夹持器的位置。取机器人 的大臂长度为厶,机器人的小臂长度为5,该设计 是一个一维优化问题八匕故该优化的设计变量为L = /L), L2 f(1)2 4为使机器人尺寸小、结构紧凑,大臂转角小和受 力状况好,应使机器人的大臂和小臂长度之和最小, 并验算大、小臂的转角位置.故水泥袋装卸机器人优 化的主要目标为大臂和小臂长度之和最小。2 5机器人的大、小臂长度受到装卸车时水泥袋所 处的最
8、远点和最近点位置、以及大臂不能与车廂侧 板发生碰撞等要求的限制。2 5. 1大臂不能与车厢侧板发生碰撞如图2所示,机器人与车厢最近的水泥袋之间, 大臂不与车厢侧板发生碰撞的最小仰角为6 = arctan (NZV 丿=arctan (960/1 000) =43. 83 (2)式中M为机器人基座与车厢侧板的水平距离, M = 1 0()0 mm; N为大臂关节轴线与车厢上部的垂直 距离.N =960 mm。如图3所示,机器人与最远处水泥袋的平面距 离为3 667 nun(计算过程从略),机器人到车厢侧板 的距离为x=3 667 XI 000/3 047 = 1 203. 5 mm机器人距最远的
9、水泥袋时大臂不与车厢侧板 发生碰撞的最小仰角为6 =arctan(960/1 203 48) =38.58(3)3根据上述分析可知当大臂关节轴线与车厢上 部的垂直距离一定时距离越远的水泥袋所需大臂 的最小仰角越小,最小仰角为3& 58o考虑到大臂 具有一定的截面尺寸取在最远位置大臂的最小仰 角为6 =40.从图4可以看出(n +A| +/i2) /L、sin40或n L sin40加尼EFAO.有Li A (hi + lb ) / sin40,当机器人到达车厢最远位置的最下层时应保 证e 40.此时 A, =200mmjh =600mm,大臂的长 度应满足Li 1 244. 58mm(4)机器
10、人装卸水泥袋的极限位置如图4所示.机 器人大臂和小臂的长度如果满足了 4个极限位置. 即:水泥袋位于车厢最远的最下层和最上层、水泥袋 位于车厢最近的最下层和最上层机器人就可以装 1994-2010 China Academic Journal Electronic Publishing House. All rights reserved, 242济南大半学报(自然朴学版)第21卷卸其它任何位置的水泥袋下面进行极限位置分析02 5. 2水泥嫂在车厢最远位置时AB =m =L| CO0(5)BC =FD = JlI - EF = JlI - /(6)而EF =n=BE FB =L( sii6 -
11、 (/:, + hj (7) AB +BC = P(将式(5b (6)和(7丿代入式(8)得Lico0 + Jd Li sii0 - (In +/h) /(9丿上式中 h: = 600 mm, Pi =3 667 mm 式(9)变成 Lico0 + Jd - /, sii0 - (600 - /i, / / = 3 667 (10) (1丿水泥嫂在车厢最远的最下层(最远下丿时1“三200mm.式(10)成为厶 co。】+ Jl;仏i siifi】 800 F(11)(2丿水泥嫂在车厢最远的最上层(最远上丿时hi = 740 mm.式(10)成为Lj co0 + jLf L sii2 1 340
12、 f =3 667(12丿2 S 3水泥嫂在车厢最近位置时同理.式中用A代替Pi =1 247mm,/b = 600 mm.故Lico9 + Jl: - ILX sii6 - (600 +/ij f = 1 247 (13丿 (1丿水泥袋在车厢最近的最下层(最近下丿时 式(中hi =200 mm.故厶 co05 + JlI - Lt su63 - 800/ = 1 247(14丿(2丿水泥袋在车厢最近的最上层(最近上丿时 式(中hi =740mm,故厶 co04 + JlI - lLt siifi. - 1 340/ =1 247(15)由于式(11八(12八(14丿和(15丿中都包含有大 臂
13、长度厶、小臂长度厶2和大臂仰角0且在4个极 限位置的6角都不一样.无法建立b和b的优化 模型所以不能采用优化方程进行求解。下面采用 选取一定的大臂长度厶和e仰角求解小臂长度S 大臂长度 ,分别取 1 300、1 400、1 600、1 800、2 000、 2 200、2 400、2 600、2 800、3 00(k 3 250 和 3 500 mm, 水泥袋在车厢最远的最下层时.大臂仰角0!分别取 40、45、50湘55。,通过式(11儿得到一系列的L1 值.连成曲线如图5所示。计算得到的臂长LnL: 同样满足式(、(和(。由图5可以看出.4条曲线的左侧.随着大臂长 度厶的増加小臂长度厶呈下
14、降趋势且& =40利 45 W L2下降得更快些.但L2下降的幅度不如增 长的幅度大.即大臂长度和小臂长度之和还是逐渐 増大的.当Li = 2 800 nun左右时随着大臂长度L 的增加.小臂长度b呈上升趋势所以大臂长度和 小臂长度之和增长的幅度更快。4条曲线相比较, 当0 =40时小臂长度G最小大臂长度和小臂长度 之和也是最小。图6图9为水泥袋在最远下、大臂仰角。分 别取40。、45、50和55时.取一系列的大臂长度 厶,水泥袋在最远上、最近下和最近上3个位置时. 此时得到的大臂的仰角6曲线。可以看出,几个图 的曲线规律基本一致水泥袋在最近下和最近上位 置时.大臂仰角变化不大.都远远超过了式
15、(2丿大臂 仰角43 83酌要求。Li /mm7=45.3当大臂长度Li v 1 500mm时水泥袋在最远上 的e角小于在最远下的e角如图6在最远上e 40力、干大臂的最小仰角的要求在最近上和最近下 的e角也不理想,大部分情况接近或超过了 160。, 大臂与车厢侧板容易发生干涉。当3 00()乙 1 500 mm时.在最远上位置大臂仰角变化在 (60。70。丿相差不大在最近上和最近下两个位8=50.3 / mm9=55,3置随着厶的増加P角呈下降趋势在L! 1600 mm 时P角下降的幅度变小,曲线趋于平坦,当L,的值 超过3 000mm后由于大臂长度过大在最近上和 最近下两个位置大臂的角将会
16、小于90,出现了 大臂与小臂关节处越过水泥袋的垂线位置.由于大、 小臂的长度过大运动性能和受力状况变差。3优化结果与分析为使机器人结构紧凑,应尽量减小大臂和小臂 的长度.并保证受力状况良好。由图5H3 9可知, 水泥袋在最远下时.大臂仰角取40与取大于40的 各值相比较大、小臂长度之和最小。由前面分析可知当大臂长度厶 3 000 mm时,随着大 臂长度的増大.小臂长度也将増大.这样大、小臂长 度之和将显著的増大.受力状况也将变差,可以看出 在1 600 L. bot 1998.25(6):384 - 388.4 Spiess J. Development of high capacity ba
17、gging and palletizing linesJ EWorld ccnienu 1995.26( 12): 121 132151曹 形员 超孙杏初电视机搬运码垛机器人应用研究【J】机械i殳计与制造.2002(2):44 - 46.16包胜华刘安生旋转关节型堆垛机的运动轨迹分析J|.组 台机床与自动化加工技术.2004(4):91 -927股际英.何广平关节型机器人【、11北京:化学工业出版社. 2003.8 Li Changchun. Liu Guangzlii. Wang Donglhng cl aL Research on Movement and Rulesof the Robo
18、t for Stacking up Bagged Materials M | The 3rd China Japan Confercnce on Mcchalinics 2006 Fuzhou.福州:福遂科学技术出版社.2006.9王小北林建龙朱小平抓取箱形物品的机械手的优化设计 J 1机械设计与制造.2002(6): 67 - 68.110林建龙王小北平动式轻型裝卸机机械手的优化设计IJ】. 轻工机械.2004(1):5759111汪 萍侯慕英机械优化设计(第3版)|M|.武汉:中国地 质大学出版社.1998.121张永德张虫奉SSD1搬运机器人的机械结构设计Jl 黒龙江自动化披术与应用.1
19、998(2):54 55.58.Ami length Optm izationDesgn for Load unloadBagged Ma ter h Is RobotLIChang-chun.LU Guang-zhi(School of Mechanical Engineering University of Jinan. Jinan 250022. China)Abstract:This paper has analyzed the present siuiatbn of bagged material in bad unkxid and pioposed tliat a five deg
20、ree of frcedcin pint robot should be used in bad unbad Taking the carpo truck (carrjring capacity: & 5 tons) and the cenent bag (net weight 50 kg) as the bad unbad object ensuring tiiat the robot and the ccmparinent side bar can not iiHertere in the bad unbad pmcess and that the mbot am can arrive e
21、ach positbn in the compartnent, we optmize the big and snail am lengths of the K)bot and discuss the big a on elevation angle and the movement peromance Finally the op tin ized am length size is obtainedKey words: bagged materials; robot a in length: bad 6 1994-2010 China Academic Journal Electronic Publishing House. All rights reserved, 242济南大半学报(自然朴学版)第21卷unbad: op tin ization6 1994-2010 China Academic Journal Electronic Publishing House. All rights reserved,
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
