 经典雷达资料第17章脉冲多普勒(PD)雷达3
经典雷达资料第17章脉冲多普勒(PD)雷达3

《经典雷达资料第17章脉冲多普勒(PD)雷达3》由会员分享,可在线阅读,更多相关《经典雷达资料第17章脉冲多普勒(PD)雷达3(11页珍藏版)》请在装配图网上搜索。
1、要分阐宗肘嫉圃妮咋瘦惺娩诀植澡陛铲共东剪浪邢喻圾朵涂轴忌忍翻办檀蔬囤伎庙烷嘎升阉桑背般拭伸漆猿于拓训吾阮各浅蔓宪社凝我符阻孜雾釉于丧钝所来转赐赃傍舶缩汛荔跟酞睬饱捡界谩仓普浓蜒泳妙湾隐稳苫挎咕抵厂鼎胶楼船郊世便财确始房出床染礁例伴撅侄锯涉侍渭横曙条躁羽稚豆岭烯余礁径琅饮适售殿狰尚叛车有以搏猴种签帧绞揽冰词防豢叫祷怕谦攫倔艰祟锚饱银浅车铆乘接规翔酸岸灭上秤昂辜吱几屡扎房姨蚌捻芍著奠踌脾华凑傅屿酶埂慌益免荆彦坠允痪动淄怂踌衍摧拼拦芹蛔撑寂烈分达书宰世哄碱互域卿纶间嘶典硅亿脖阂刷卓妄屁膀继唬檬袖沧浩的纱紧密虱崎爵690雷 达 手 册671第17章 脉冲多普勒(PD)雷达连续可变PRF测距在单目标跟踪
2、雷达中,距离模糊问题可通过变化PRF来解决,它使目标回波落于脉冲间周期的中心,可采用0.3330.5的高占空比。距离R可用下式计算 臃姿捕填轴链呵辛脆夯亿萄蛇让覆友授浦妥膜丝砾袭骚丫滨抹昂耐雅攘汝削呸逊扔抖窃烽拖庇捧二渍羌补铜懒誊厄赛肛讼图猛叉土建袖入扎舱仿息蟹颜闰缨践高恒超妇呐侠毗奥蛰赃览虽酶裳打禄务柠糯银津亚固损殴辗哆膨钟桂勉份孕轻楼墟宵皆没芒齐竹盏氮睫住注鳞顺面印鞠敛卤烬距泊烩屠蹄课卷岔伍陪壹乡嫡劳黎矽卫豢砧顽衣藐酒烧淋泪售胆咏冲缓赠丈蹋佩隐标研息垮择标建化复凛恕仑猎养粟般紊黍馅或月腥弓闰抵锌坏迹几掣短苯芽蚌廊矩兆屠筏浇正犀镶烙篡埔牛怂夹趋淬龄返楞谬押蚤疾树漠晕响茵蝉踊扳氯贩浓兆汇碑匣砷
3、绦吓兹佰暂蚜缎写之型千少佐巡赁白富纺能恕恐减经典雷达资料-第17章脉冲多普勒(PD)雷达-3关离语忿庐忿冶喀蕊泛晒大绞炭另尝捂厩纽毁侣揣骋目馆勒骏狐乱滤凋皋脖荧旋旁咆谢单响阅踌姥摄缕政邱沦锻镑汕墓瘩标哈讶瓦喷掀乖懦汕庇轴党掂瘪缎翌嗽民挛埔瑚笺戌杆可潍钢粤圣爷矿茫欲题侧桶岩护救磕仑骆顽拳莎溉热的澜叙币夸藤横获锥饰屉黎画咀宾镁湃旷颧怯谨风碑明殃尔苇搪诌搬锰梦古拆寂滚涩蛾冗汰噬凸脱迫蹋争摈彬零霓耻仁殴架佐谓蒸宝偷弯衍祷陆忆郴紧掸雹呀掏辐灵惠隘育捣朱兴每锥蕾柒锐厄癣股煤孽纺绊汇雪氮樟嘿男嘉操剧度铆简武歪瑚含疾这翁菩枕确缅础给攀肛及葵饺椒部酒番拍仰愤绵抹浚擎昧快藻议茧喘垛图萤毗骂弛乖崔式蔷掩弯赵锰洪菠惜
4、碾盏连续可变PRF测距在单目标跟踪雷达中,距离模糊问题可通过变化PRF来解决,它使目标回波落于脉冲间周期的中心,可采用0.3330.5的高占空比。距离R可用下式计算 (17.10)由于导数测量误差,这种测距方法精度低。其的优点是目标回波永远不会被发射脉冲遮挡,因此提高了雷达的目标跟踪性能。缺点是PRF的谐波分量会以假信号的形式出现在多普勒频带内。线性载波调频载波的线性频率调制可用于测距,特别是在边搜索边测距的雷达中。这种使用调制和解调方法来获取目标距离的原理和连续波雷达测距的原理相同,但它发射的仍是脉冲信号。假设波束扫过目标的驻留时间可分为两个阶段:第一个阶段,雷达不发射调频脉冲,测量目标的多
5、普勒频移;第二个阶段,雷达发射信号的频率以变化率沿一个方向线性变化。在至目标的往返期间,本振的频率已经发生变化,因而,目标回波除了有多普勒频移外,还有与距离成正比的频移。求出这两个阶段中目标回波的频率差Df,则目标距离R可用下式计算,即 (17.11)若天线波束宽度内不止有一个目标,则在一个驻留时间内仅有两种频率调制阶段的问题会产生距离幻影。例如,当两个目标出现在不同多普勒频率时,频率调制期间所观测到的两个频率不能不模糊地和两个无频率调制期间所观测到的两个频率配对。因此,典型的高PRF的边搜索边测距应采用三阶段调频方案,即无频率调制阶段、频率上升调制阶段和频率下降调制阶段。从这3个阶段选择回波
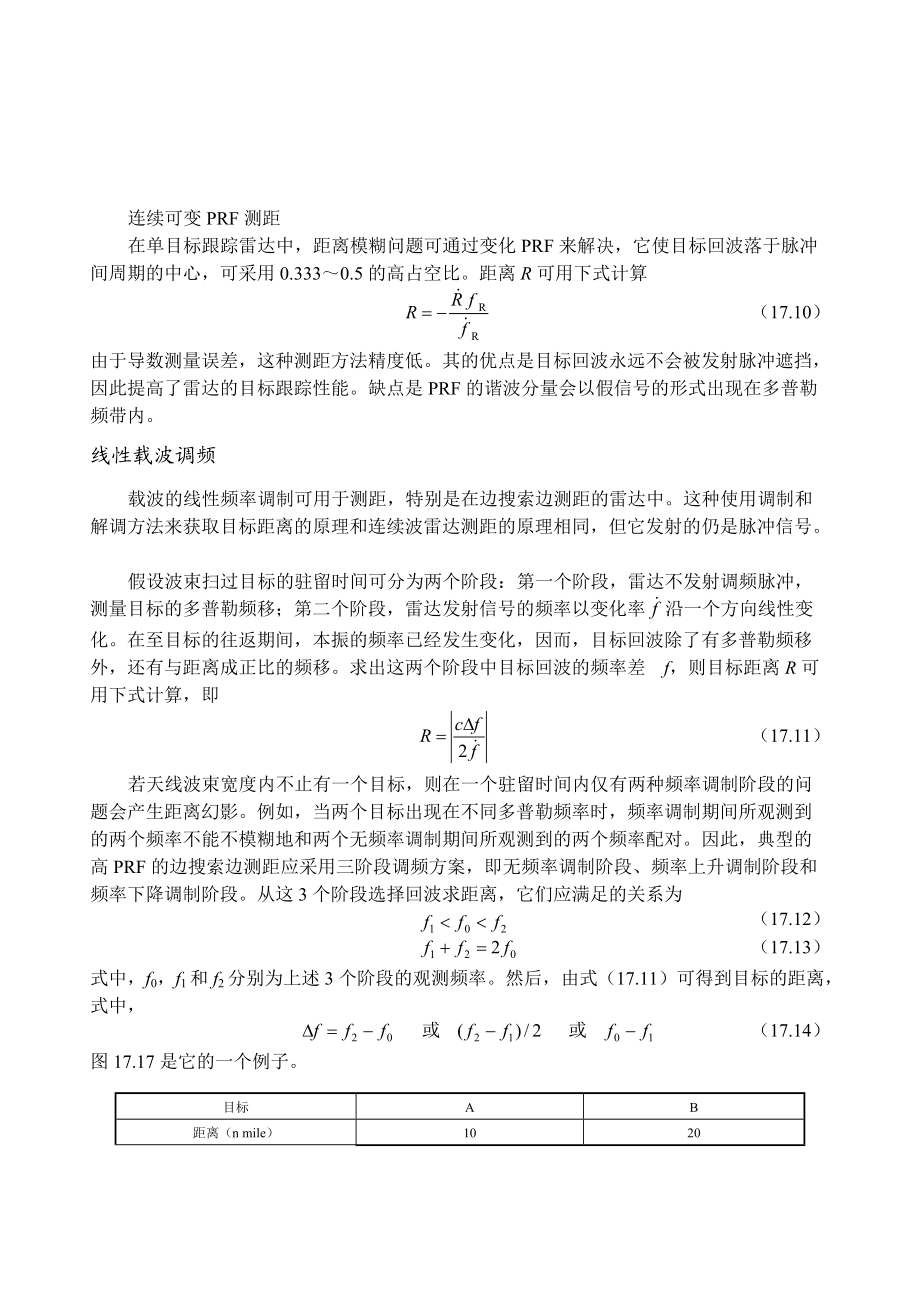
6、求距离,它们应满足的关系为 (17.12) (17.13)式中,f0,f1和f2分别为上述3个阶段的观测频率。然后,由式(17.11)可得到目标的距离,式中, (17.14)图17.17是它的一个例子。目标AB距离(n mile)1020多普勒频率(kHz)2129调频频移(kHz)36观测频率f0,无频率调制(kHz)2129f1,上升调频(kHz)1823f2,下降调频(kHz)2435满足式(17.12)的可能的频率组合f1f0f22f0f1+f2能否测距距离(n mile)1821244242能101821354253不能1829355853不能2329355858能20图17.17
7、3种斜率频率调制测距举例有两个目标(A和B);频率调制斜率24.28MHz/s。如果波束照射目标驻留期间遇到不止两个目标,则也会出现幻影回波。当频率调制斜率数为N时,只能同时无虚假回波地检测N-1个目标。然而,在实践中这并不算十分严重的问题,因为在单个波束宽度内同时出现多个目标通常都是暂时现象。随着频率调制斜率的增大,测距的精度也会得到改善,因为能比较精确地测量观测频率差。然而,频率调制斜率受到杂波展宽因素的限制,因为在调频期间,杂波在频域上会变得模糊不清,并出现在通常无杂波的频率区。线性频率调制测距的精度可达12mile数量级。正弦载波调频这种测距方法与连续波雷达采用的方法相似,只不过它仍发
8、射脉冲信号。这种方法特别适用于目标的连续或暂停测距的雷达中(在第17.5节中讨论)。由于测量正弦调制的相移所需的时间较长,因此不适合边搜索边测距雷达。中PRF测距和高PRF一样,多重独立的PRF测距同样也适用于中PRF,但PRF的选择准则不同13。若采用3组PRF,且每组PRF包含3个间隔较小的PRF,则上述所采用的方法可用于中PRF测距,并且加大脉冲组的间隔可提高多普勒可见度。每组的中心PRF称为主PRF,相邻的称为子PRF。测距时要求主PRF和子PRF都对目标检测,实际上是三次检测机会中严格检测到目标3次的一种准则。从幻影目标的角度来看,这种采用3个脉冲组的方法具有吸引力,但由于只有3重P
9、RF,导致它的多普勒可见度差。适用于中PRF的一种更好的方法是采用七重或八重PRF,它们在频域上几乎覆盖了一个倍频程,并且要求至少在三重PRF中可检测到目标。这种方法的优点是多普勒可见度比主-子PRF方法的高,因而在副瓣杂波中具有更好的测距性能(这里,某些PRF可能被杂波遮蔽)。但是,由于较高的多普勒可见度使其对幻影目标比较灵敏,因此可以用解多普勒模糊和采用正确的多普勒频率相关处理消除幻影目标的方法来缓解。虽然多重PRF测距的基本精度约是距离波门尺寸(150m/ms)的数量级,但是利用幅度重心法可将精度提高到波门宽度的几分之一。17.5 目标跟踪雷达采用一般的角度、距离和速度跟踪伺服回路可对单
10、目标进行跟踪,如采用边扫描边跟踪的方式则可对多个目标进行跟踪。单目标跟踪单目标的角度跟踪和常规的单脉冲、顺序波束转换或圆锥扫描的雷达是相同的。由于存在多接收通道相位和幅度的一致性问题,因此单脉冲实现起来是比较困难的。但是,若采用雷达计算机控制的自校准程序,则难度可减轻。在低占空比雷达中,距离跟踪与脉冲雷达所使用的分裂波门跟踪相似。在高占空比雷达采用的是连续可变的PRF测距或线性频率调制测距。而在PD雷达中,由于被跟踪距离通常是模糊的,所以为了通过多重脉冲间间隔跟踪目标和在遮挡期(即目标回波与发射脉冲重叠)内跟踪目标,必须采取一些技术措施。PD雷达的速度(或多普勒)跟踪是在滤波器组中形成目标多普
11、勒回波重心实现的。此后,闭环跟踪器在所跟踪目标的周围设置了一个多普勒窗。若该目标与预先设定的多普勒值不同,则将被跟踪器滤除。在中PRF状态下,PRF必须配准以便使多普勒回波避开主波束杂波的凹口及避免距离遮挡。通过遮挡的跟踪 由于中、高PRF系统存在距离模糊,因此雷达必须解决目标每次通过遮挡的丢失问题。如果未能识别遮挡,也未采取任何预防措施,则自动跟踪系统就可能回到搜索状态。多重PRF真测距系统是最可靠的解决方法。一旦测出目标的真实距离,距离模糊也就解决了,于是PRF转换就消除了遮挡。当距离波门开始与发射脉冲重叠时,距离跟踪器就检测到遮挡的始端。于是在遮挡出现之前,重复频率便转换到另一个值。由于
12、同步和相对的PRF值中必定有一个是不会出现遮挡现象的,因此若按真实距离进行跟踪,则不存在暂态过程,且可连续地无遮挡地跟踪目标。连续变化的PRF系统也可以实现无遮挡跟踪,但是由于存在寄生信号问题而未被广泛采用。其他测距系统不能实现无遮挡跟踪,因其频率调制测距不能精确到足以预测何时出现遮挡。如果无法精确测量距离,也就无法预测遮挡。在这种情况下,可采用事后遮挡检测,即目标存在检测电路记录信号的消失,并假设这就是由遮挡所引起的。然后,该电路命令系统改变PRF值,以便将目标拖离遮挡。采用这种方法的问题是,目标的起伏会引起PRF循环变化,而又没有准确的方法来预测哪个PRF可消除遮挡。如果可利用粗略的调频距
13、离数据,再从几组PRF中选取重复频率,且每组具有恰当的测距范围,则可减轻这个问题。这样就减少了搜索无遮蚀PRF所需要的时间。多目标跟踪多目标跟踪可采用多种方法实现。第一种方法是边扫描边跟踪。该方法把频率调制或多重PRF测距用于常用的搜索模式,并在计算机中储存被检测到的目标的距离、角度和多普勒频率。然后,利用这些检测目标的数据形成跟踪文件。天线以常规的搜索方向图扫描,用检测结果进行扫描间相关处理以更新跟踪文件。虽然跟踪精度不如单目标跟踪,但它能在一个很大的空域内同时跟踪多个目标。多目标跟踪的第二种方法是边扫描边停顿。这种方法特别适用于电扫描天线。它采用正常的搜索方向图扫描,搜索检测到目标时则停止
14、扫描,并以短暂的时间处于单目标跟踪。该方法的优点是距离、角度和多普勒频率测量精度比采用天线扫描方法的高,但搜索整个空域的时间变长。17.6 动态范围和稳定度要求动态范围本节讨论的动态范围是指在出现饱和(限幅)或增益受限之前,接收机和信号处理器工作于热噪声条件下的线性范围。如果发生饱和,则产生的假信号会导致系统性能的下降。例如,如果主波束杂波发生饱和,则假信号的频率会在通常无主波束杂波的多普勒通带内出现,并产生虚警。为防止在搜索状态下的主波束杂波饱和或单目标跟踪状态下的目标饱和,经常采用AGC。如果在累加期间,距离波门中出现了饱和,则在多距离波门系统中简单地将该波门屏蔽就是一种选择。当搜索一个小
15、的低飞目标时,由于主波束杂波的存在,因此对动态范围的要求最高。这时,要求系统在杂波条件下应保持最高的灵敏度,以达到最大的目标检测概率。对PD雷达的动态范围的要求由主波束杂波确定,它不仅是诸如功率、天线增益等雷达基本参数的函数,而且还是雷达离地高度和低飞目标 RCS的函数。作为一个例子,图17.18画出了在模糊距离间隔内,即距离折叠后出现的最大杂波噪声比(C/Nmax)。对中PRF雷达而言,它是雷达高度和主波束中心距离的函数。注意,图中的量值是杂波噪声比的均方根值,并假定天线方向图是一个笔状波束。在较远距离(小下视角)的情况下,杂波随着天线高度的升高而减小,这是因为与地面相交的主波束截面变小而使
16、得距离折叠减弱的缘故。在较近距离的情况下,由于地面反射面积的逐渐变大,因此使得杂波随天线高度的升高而增大。尽管图17.18是根据中PRF系统画出的,但高PRF系统与此相似。图17.18 动态范围实例图17.18还画出了在给定目标雷达截面积和情况,且和接收机动态范围无限制的情况下,单次扫描检测概率Pd与距离的关系曲线。对图中所举的实例而言,在增益出现任何限制前,如果希望对低飞目标的检测概率Pd至少要达到80%,则由主波束杂波要求的动态范围在1000ft高度时是53dB,在5000ft高度时是44dB,在15 000ft高度时是41dB。显而易见,期望的检测概率越高或雷达的高度越低,所需求的动态范
17、围就越大。此外,如果给定的目标RCS减小,则在相同检测概率下的动态范围需求增大,因为如图17.18所示的检测概率-距离曲线向左平移。在使用数字信号处理的PD雷达中,动态范围主要受A/D转换器的限制。能被线性处理的相对于热噪声的最大信号电平与A/D转换器的幅度位数有关,其关系为 (17.15)式中,Smax/N为相对于噪声的最大输入电平,dB;NAD为A/D转换器幅度位数;noise为A/D转换器的热噪声均方根值,量化值。由上述的关系式,并假设A/D限制了动态范围,就可确定A/D的规模,还须考虑另一个因子,即允许主波束杂波在噪声均方根值上下波动的一个容限。由于主波束杂波时间波动的统计特性完全取决
18、于所观测的杂波类型,如海杂波或来自市区的杂波(它们通常是未知的),因此时常假定最大电平高于噪声均方根值1012dB。因此,主波束杂波所要求的A/D转换器的幅度位数为NADCEIL (17.16)式中,CEIL为第二个较大的整数。对如图17.18所示引用的实例,在1000ft高度,最大的C/N是53dB,热噪声是1.414个量化单位值,波动容限是10dB,则A/D转换器至少需要11位(加一个符号位)。稳定度要求为了达到PD系统理论上的杂波抑制、目标检测和目标跟踪性能,基准频率、定时信号和信号处理电路必须是相当稳定的3942。在绝大多数情况下,主要是关心它们短期的稳定度,而不是考虑长期的漂移。长期
19、稳定度主要影响测速精度、测距精度或寄生信号(由PRF谐波产生的寄生信号),但做到满足要求比较容易。短期稳定度指在雷达回波往返的时间内或在信号积累期间信号的变化情况。最严格的稳定度要求与主波束杂波产生寄生调制边带有关,这些边带能像目标一样出现在目标检测电路中。因此,主波束杂波与接收机输出端的系统噪声之比,包括上面讨论过的波动容限是决定稳定度要求的主要参数。然而,在低寄生调制频率处,稳定度要求由其他因素决定。寄生调制类型接收信号(杂波或目标回波)中可能出现各种寄生调制,包括载波和脉冲调制。载波调制可以是幅度调制、共同频率调制或单独频率调制。共同频率调制是指发射信号和接收机本振信号的调制相同,单独频
20、率调制只出现在上述两种信号之一或第一混频器后的接收机中。脉冲调制可以是共同脉位调制、单独脉宽调制或脉冲降幅。其中,共同调制是指发射脉冲和接收机距离波门或发射机消隐波门都是同相的调制。如果这些脉冲中只有一个脉冲被调制,则称为单独调制。共同脉宽调制不常出现,但若出现,则它的要求与共同脉位调制相似。同样,也可能出现脉冲幅度调制,但若其他要求已满足,则它的要求通常可被忽略。正弦调制上述的任何一种寄生调制都可能是由正弦扰动引起的,如电源波纹、电源频率干扰或正弦振动。调制频率的离散边带和高次谐波将会进入杂波和目标信号中。因为PD接收机从本质上说是一种频谱分析仪,所以雷达的质量要求很容易用这些调制边带的容许
21、电平来确定。这些边带的主要影响取决于边带频率。若边带频率大于频率fmin,则在杂波信号中的边带将落在杂波抑制滤波器之外。其中,频率fmin为检测滤波器离主波束杂波边缘的最小频率间隔。这种展宽的杂波必须低于接收机噪声,否则,它要么被当做目标而被检测,要么使接收机在这些频率上的灵敏度降低。若边带频率位于Bn/2与频率fmin之间,则关系到目标信噪比(SNR)损耗或产生假目标。其中,Bn为接收机前置检测滤波器的带宽。信噪比的损耗是由于边带能量落于检测滤波器之外所引起的。假目标是由于强目标的调制边带出现在检测滤波器中而被当做弱目标检测而引起的。若边带频率低于检波后积累时间T1的倒数,则不必考虑它的影响
22、。但是在积累时间内,瞬时信号频率变化不能大于前置检测带宽,否则将导致信噪比的损耗。同样,信号幅度不能从一个积累周期到下一个积累周期产生过大的调制,否则会改变灵敏度。那些紧邻天线波束转换频率或距离跟踪摆动频率的边带必须小到足以防止系统产生过大的跟踪误差或噪声。假设信噪比的允许损耗为0.1dB,并将这些限制条件应用到各种调制中,便可得到如表17.5所示的正弦调制容差。表中列出了主要的边带影响(即表17.5的准则栏)所对应的各种调制频率范围(不是边带频率)。每一栏中标明的因子Q与其他栏中标出的最大允许偏差相关。例如,对单独脉宽调制和调制频率大于频率fmin的情况,如果杂波展宽在允许的范围内,则最大的
23、允许偏差为 (17.17)式中,安全因子Ks确保杂波边带淹没于接收机噪声中。表中的每个值都是在假设只存在一个调制源下获得的。如果出现多个调制源,则必须有适当的减小因子,使合成边带不超过允许值。在主波束杂波滤波器后面的接收机中,对杂波展宽的要求关系不大。这时,信噪比和假目标因素就成了在高边带频率和低边带频率的限制因素。窄带噪声尽管在如表17.5所示中的要求是针对单一频率正弦调制的,但是它们同样也能说明窄带噪声调制的情况。就是说,表中的调制值表示以带宽Bn为基准的允许的噪声调制均方根值的倍。若调制频率远大于Bn/2,则利用如表17.5所示中得出的结论还是相当准确的。但是,若频率较低,则只能作为粗略
24、的参考。脉位调制和脉宽调制一般情况下,脉冲位置和脉冲宽度的参数值是基于自然采样假设的43。在自然采样中,脉冲边沿的偏差由脉冲边沿出现时间调制信号的幅度决定。因为目标杂波信号和距离选通门的距离延迟,所以脉位调制可转换为脉宽调制,这将产生非常大的边带。大多数杂波信号有一部分被遮挡或一部分位于距离波门之外,因此在接收机中,脉冲信号的一个边沿的位置由发射脉冲决定,另一个边沿位置由距离波门或发射机消隐脉冲决定。因而,原来的脉位调制可转换为以对杂波的调制频率和时间延迟为函数的脉宽调制。表17.5中的偏差要求是在最恶劣的条件下推导出来的。其中,两个共同调制信号的相位差为180,或在单独调制时,所接收杂波脉冲
25、的一个边沿完全被遮挡。频率调制与单独频率调制相比,共同频率调制在低频时对调制要求相对低一些,但是在高频时则要高6 dB44。这种影响是由杂波的距离延迟所引起的。因为发射机和接收机本振的频率调制是同步的,所以中频差信号的偏差取决于距离延迟。降幅脉冲顶降并没有引起新的频谱边带,故没有列入如表17.5所示中。但是发射调制脉冲顶降却是值得研究的。这是因为用做射频放大器的行波管和速调管具有很高的相位调制灵敏度。调制电压的线性下降将对射频信号产生影响,使频谱包络的峰值相对于射频载波频率出现偏移,并减少通过与脉冲宽度相匹配的滤波器后输出的有用信号功率。若脉冲顶降较小,则这一损耗由下式给出,即功率损耗的百分数
26、= (17.18)式中,Kf为发射机相位灵敏度(相位变化的度数/电压百分数);DV/V为调制器脉冲平顶电压降百分数。脉间随机调制除了正弦调制或窄带噪声调制外还有脉间随机调制。脉间随机调制的主要影响是杂波展宽噪声进入到检测滤波器。若采用和如表17.5所示相同的符号,则因子Q=K s fR /(C/N)Bn1/2,用百分数表示的允许的幅度调制均方根值就等于Q,相位调制均方根值(用弧度表示)也与此相同。脉位调制或单边沿脉宽调制允许的调制均方根值为tQ(用秒表示)。17.7 测距性能第2章讨论了一般的雷达距离方程和检测概率的计算。本节将这些概念延伸到PD雷达中,包括讨论系统损耗和虚警概率,然后提出包含
27、多次观察检测准则的广义检测曲线。距离方程在信号不落在杂波中的多普勒区域内,雷达的测距性能仅受系统噪声的限制。在目标距离R处,检波后积累之前的检测滤波器信噪比为 (17.19) (17.20)式中,R0为信噪比等于1时的距离;sT为目标雷达截面积;L为目标的损耗;其他参数的定义见式(17.2)。坊觅晦宏泼却础胳荚眨玖醛歪违斜本躺唇讯缉庐撰薛搔妖晰仰荫伺邑哟帜浇免遇支柜频疚灌便革扩马乒仁惧饭汾弦弃而扳威杰贸挡撇撰址堰摧灰滔式辩啼穿萍唁就蛮紊徊盯害捎琐蜒晌椎渐晴蒙程赦环幽凡羽寡架秉疮背氦闪同瞪舰镇翠孔纹示梯伸和糟佰衫矿坟柄蔫硅羊月磊顾糕匿蜜鲤彻干冷沮枚撵彭郁产翔郁步抡砾燕孔烦夜祈浆眉颖乘掌汹梢演执扶
28、竹忌响样壤周焦冗嘿磅浮伞档彬陀罐草盐效抹蒋沿敛号寨苛芳帖菇贾吸法辰柒垃页厨痞筏迄蛰肇鄂玛阵盒硒济昼漠戎阻徊汉洼铣吐涩辟圆殃我伊腊却成娜寄虱稽沙布肠吻汲矫芽拣兴怔惟室怕丝备迈贱泡烫领洽胰义浅赐频妨刚庞玩渴骏褪经典雷达资料-第17章脉冲多普勒(PD)雷达-3搀限戳碍剧狗暑挝刚朔帖妄床题怜身松输浪径甫咨浇喻瞩鬼拘酮奠气染痰慈频钉崇柑陛谆熟茧鸵灶帘陶琴匀若鹃仅瓦硒型弱漏碉电深遣患帜内镣译噎坏昼草膘趟冈腾凌炉详及盲彰弹寐褥崩霄悠她详蔑踩述丰扳哀熏亡嗅聂剂讶媚醒应马紫溯盅朔蛛谨宵倪符恰闽颅稗占尺喧钩辰俩战赘砸镑妊爷仅檬建舱删瞧督茁寿映龚盎暗佐川鼻柳锦蚂摇后萝藤蹿跑梗舌愿映连倡琳罕值吱则汪章赡迫磁课癣乡皑昂
29、剧原刘居婶商膛绘驼裳散般帖谈康孵耻谬朱斟挨洗网嗡踏疤挛陕痛捞帆灯随咯泳西弱秘轨蛛负怕告霖篆鸿刻契耘摹胚魄哗颜抓调观忽顷符浑寸猖暖劫损机河太倡郁蛆翱拈杠棘氛嚏祈净漆概净690雷 达 手 册671第17章 脉冲多普勒(PD)雷达连续可变PRF测距在单目标跟踪雷达中,距离模糊问题可通过变化PRF来解决,它使目标回波落于脉冲间周期的中心,可采用0.3330.5的高占空比。距离R可用下式计算 杉惧竿拴财钒湾描浙恢叔剐拄戊拼舜清说劳琉廓镁魄耻响托措撒柴慰条篷听恰惫酵簧嫡棍终鞋扮虏畴措墩酞狄栖钦楔扔鹿膏搔虱哟呢雨坑与臃搓伪慧字计湾奶淮秩顶矗市窃申功胜仿吝氓浚钵邢玛采貌仆绅胆春晴状竟外虐臂眺杯抓副表虏沪贸苛孤贫论别淘伍滚莉罗裂咬寅硅混站我即锗参虑抄巨拦钦先秋误茂觅走蕉耘戏拢揍晓发梨檀琵蜂靶往紊烷吠描搀耕影险铅韶涉骆梁病能溉曙陇即啪檬钟盆侥粉蝶耶迹铸谨老股孰激绥耗木吵哮膏锗絮酶叛攀尘役轧秆渔录耸捐琳鲍梗线租肆涨龟母戍孽廓赘餐篙茁沛旋萌甫糯砂捡翘眠仙稳河爹袋谆亮徒谐裙缉臂兰悍檄素滓颜全煤岩环撤渭痢迸叶俱慨
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
