 建立离合器接合分离模型
建立离合器接合分离模型

《建立离合器接合分离模型》由会员分享,可在线阅读,更多相关《建立离合器接合分离模型(13页珍藏版)》请在装配图网上搜索。
1、建立离合器接合/ 分离模型离合器是机械传动中常用的部件,位于发动机和变速箱的飞轮壳内,可将传动系统随时分离或接合,切断和传递发动机输出的动力。利用matlab Simulink建立离合器接合 / 分离模型,可对离合器工作原理进行仿真。由于系统在动态运行过程中,离合器接合/ 分离而使拓扑结构发生改变,所以离合器的模型搭建是比较困难的。两种拓扑结构或者说两种模型之间要小心处理,以保证新模型的初始状态和切换前模型的结束状态一致。1 模型搭建原理介绍离合器系统一般由两个盘组成, 可以将转矩在发动机和变速器之间传递。 分成两种状态:一是滑动态( slipping),两个盘具有不同的角速度;二是接合态(
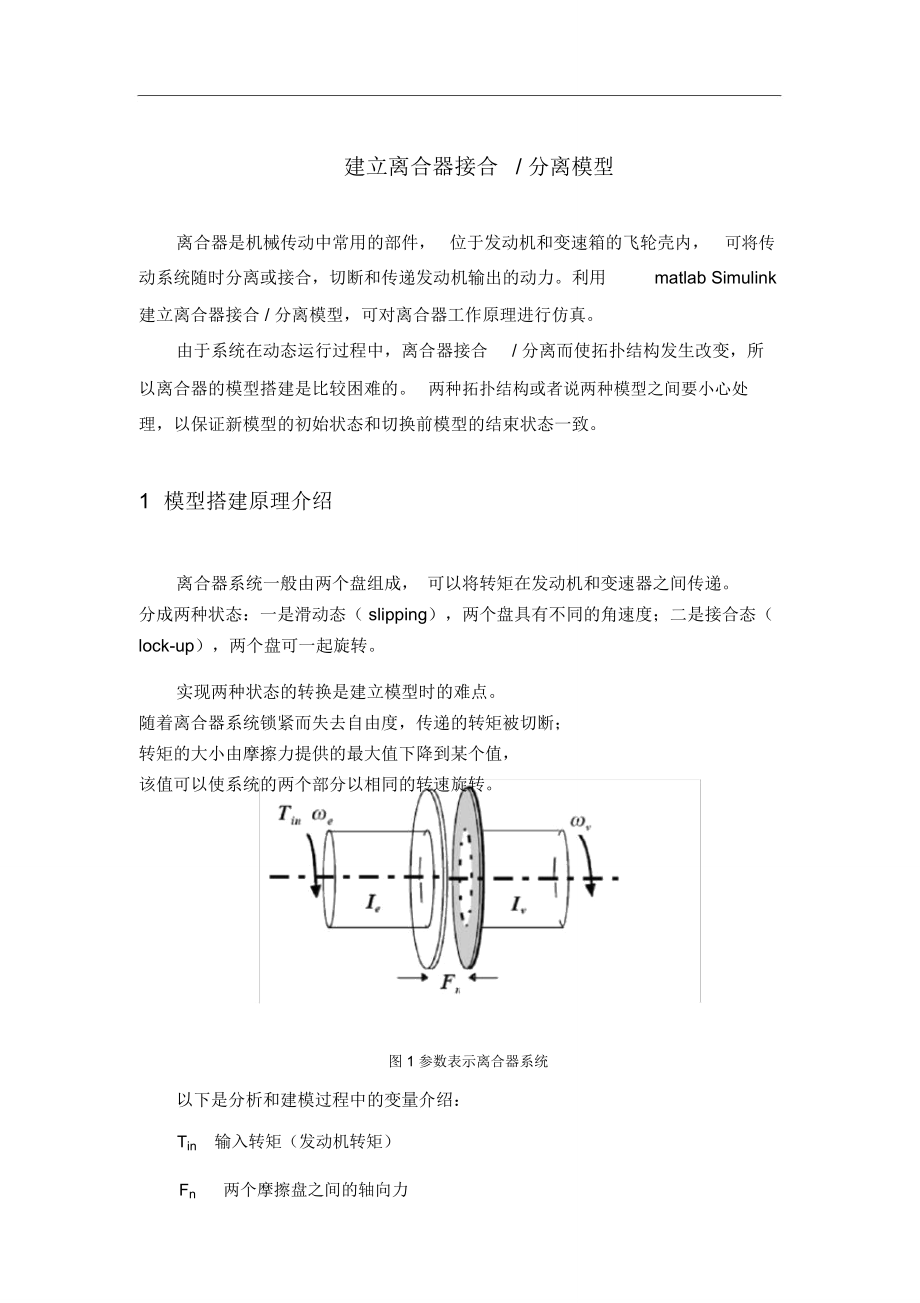
2、lock-up),两个盘可一起旋转。实现两种状态的转换是建立模型时的难点。 随着离合器系统锁紧而失去自由度,传递的转矩被切断; 转矩的大小由摩擦力提供的最大值下降到某个值, 该值可以使系统的两个部分以相同的转速旋转。图 1 参数表示离合器系统以下是分析和建模过程中的变量介绍:Tin输入转矩(发动机转矩)Fn两个摩擦盘之间的轴向力I e, I vbe, bvk ,se ,v发动机惯性力矩;变速器(传动装置)惯性力矩发动机阻尼率;传动装置(汽车一侧的离合器)阻尼率运动摩擦系数;静止摩擦系数发动机角速度;输入轴角速度r1 ,r2离合器片(从动盘)摩擦表面内,外半径R 等效半径Tcl通过离合器传递的转
3、矩Tf用来维持锁紧的离合器所需要的摩擦转矩方程组 1:耦合系统状态方程推导得:I e &eTin be e Tcl(1-1 )&TclvbvI v v(1-2 )方程组 2:离合器的最大转矩可以表示成其内外半径, 摩擦特性和轴向力的函数, 如下所示:rFfFr2222(Tf )maxdandrdRFnA2r2 ) r1r3A(r021Rr23r1322 (对于非金属材料的当量半径)r2r 1方程组 3:当离合器处于滑动态时, 摩擦系数取动摩擦系数, 最大动摩擦转矩方向和滑动方向相反。方程式可表示成:Tf max s2 RFn s3Tcl sgn(v )Tf max k方程组 4:当离合器处于接
4、合状态时,发动机的角速度和输入轴的角速度相等。即ev并将该式代入方程组1 中,得到:( I eI v ) &Tin(bebv) &方程组 5:解方程组 1 和 4,当离合器处于锁紧状态时,通过离合器传递的转矩可表达成:TcI vTin (I vbeI ebv )TfI eI v方程组 6:若 T f 的值超过最大静摩擦力 Tf max s ,离合器会从滑动态转换到接合状态。锁紧状态最大静摩擦力为:Tf max s2 RFn s3下图表示了离合器整个运行状态:图 2 状态转移图两个模型之间的切换要小心处理, 以保证新模型的初始状态与切换前模型的结束状态一致。1.当处于滑移状态时,如果主从盘转速相
5、等,且保持离合器接合所需要的摩擦扭矩小于最大静摩擦扭矩,则切换到接合态;2.当处于接合态时, 如果保持离合器接合所需要的摩擦扭矩大于最大静摩擦扭矩(即最大静摩擦扭矩也不足以传递如此大的扭矩),则切换到滑摩态;3.切换动作除了决定于上述两条件,还决定于系统的当前状态(滑摩或接合),即决定于 FSM(有限状态机)。4.当滑摩时,离合器所传递的扭矩是最大动摩擦扭矩。此时使用动摩擦系数。(分离态属于滑摩态的特例,此时Fn=0,Tfmaxk=0)5.当接合时,离合器所传递的扭矩是离合器保持接合的摩擦扭矩即Tf。6.最大静摩擦扭矩Tfmaxs 使用静摩擦系数计算,仅用在判断状态切换的条件中。7.离合器保持
6、接合的摩擦扭矩(即Tf )对滑摩态和接合态而言,其计算公式完全相同。接合 / 分离的有限状态机( FSM):2 建模2.1 分离状态建模( slipping)根据方程式推导,分离状态时方程可写成:Tinbe eTcl(2-1 )&eI eTclvbv(2-2)&vI vTclsgn( ev )T f max k(2-3)公式( 2-1)-(2-3)可按下面图形进行模型搭建图 3 分离状态 simulink 模型图在对分离状态 (即 slipping)进行建模中, 出现 From/Goto 基本模块,模块用于信号的跳转,表示信号来源和去向。在上述global,即全局变量。否则运行结果有误。got
7、o 部分,应将 tag visibility 定义成该模型用 Enable System即使能子系统搭建,其模型的特点为当使能端口的控制信号为正时, 子系统则可执行;否则,子系统不执行。图 4 分离状态使能子系统模型图2.2 接合状态建模( Locked)根据方程式推导,接合状态方程可写成:& Tin(bebv )(2-4 )I eI v公式(2-4)可按下列图形构建模型:该模型中的 goto 模块也应将 tag visibility 定义成全局变量,即 global。图 5 接合状态 simulink 模型图该模型也同样按照Enabled system 即使能子系统搭建,子系统图形如下所示:
8、图 6 接合状态使能子系统模型图2.3 状态逻辑模型建模根据适当的静摩擦系数和动摩擦系数, 计算求解出动摩擦力和静摩擦力。 根据下列公式进行搭建模型:(Tf ) max2 RFn(2-5 )3根据上述有限状态机( FSM)的表格,利用组合逻辑模块 combinatorial logic (如图 7 所示)和记忆模块 memory 创建分离 / 接合有限状态机模块,即如下图所示:图 7 接合有限状态机模块当处于接合态( locked)时,如果保持离合器接合所需要的摩擦扭矩大于最大静摩擦扭矩(即最大静摩擦扭矩也不足以传递如此大的扭矩) ,则切换到滑摩态( slipping)。根据此条件搭建模型图如
9、下所示:TfTf max s(2-6 )图 8 接合态到分离态条件模型图当处于滑摩态( slipping)时,如果主从盘转速相等,且保持离合器接合所需要的摩擦扭矩小于最大静摩擦扭矩,则切换到接合态(locked)。即:TfTf max s(2-7 )ev(2-8 )该模型搭建中运用到逻辑运算模块(logical operator ),选择其运算形式为And,即两个或者多个要求同时满足时,输出为1。该模型搭建中还运用到HitCrossing即过零监测非线性特征模块,检测输入从指定方向上到达或者通过指定点。图 9 分离态到接合态条件模型图将上述三组子系统组合起来即可得到状态逻辑模型图,即如下所示:
10、图 10 状态逻辑模型图2.4 动静摩擦力模型构建静摩擦力和动摩擦力公式如下所示:Tf max s2 RFn s(2-9 )3Tf max k2 RFn k( 2-10 )3图 11 动静摩擦力模型图将以上四个部分的模型图组合起来即可得到整个离合器系统接合/ 分离的模型图:图12整个离合器系统接合/ 分离模型图图形中横线上的蓝色部分是在输出的线上点击右键出现signal properities,在对话框中输入signal name,并勾选 log signal data和 test point 两个选项所得。3 输入相关参数并运行结果3.1 编写程序输入相关参数根 据已 知Fn和Tin图像,还
11、有相应的已 知量即I e1kg .m2 , I v5kg .m2 ,be2Nm / rad/ sec, bv1Nm / rad / sec,k1,s1.5, R1输入下述程序:t1 = (0:0.5:10);%time 010 s,时间间隔为 0.5sd1 = 0,0.4,0.8,1.2,1.6,1.6,1.6,1.6,1.6,1.6,1.6,1.2,0.8,0.4,0,0,0,0,0,0,0;d2 = 2,2,2,2,2,2,2,2,2,2,2,1,0,0,0,0,0,0,0,0,0;Fn=t1,d1;Tin=t1,d2;%Friction Model parameterR=1;%Frict
12、ion Model Logic parameterIe=1;Iv=5;be=2;bv=1;muk=1;mus=1.5;%输入已知的相关参数set(0,ShowHiddenHandles,On)set(gcf,menubar,figure) %输入这两条语句, 使得 scope输出图像,可输入横坐标,纵坐标名称根据上述程序写入 commend window即命令窗口后,即得到了 workspace 的输入量。将 simulink 模型部分与 From workspace 接合起来,再运行该模型。3.2 图像显示结果根据上述模型运行结果,得到几组图形。图 13 Fn 、 Tin 输入图形图 14 Tfmaxk 、 Tfmaxs输出图形图 15 we 、 wv、 w输出图象图 16 Locked,Lockup,Unlock输出图像
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
