 纯电动车底盘优化(共4页)
纯电动车底盘优化(共4页)

《纯电动车底盘优化(共4页)》由会员分享,可在线阅读,更多相关《纯电动车底盘优化(共4页)(4页珍藏版)》请在装配图网上搜索。
1、精选优质文档-倾情为你奉上纯电动车底盘优化 戴增志电动车与传统发动机驱动汽车相比,在整车质量大小、能源提供形式、载荷分布、管线走向等多方面存在较大差异,同时也使电动车各部件的布置具有很大的灵活性。如有一种电动车采用轮毂电机,以驱动电机及车用动力电池组为动力源,取消了传统车辆的发动机动力总成及传动系统,整车质心位置及簧载质量均发生了变化,动力电池组由于体积大、质量重,其布置方式及位置对电动车操纵稳定性影响很大。为了使纯电动车辆底盘结构布置更加合理和紧凑,本文针对电动车的特殊性,从动力学优化分析方面着手,提出纯电动车底盘布置方案。影响汽车操纵稳定性的因素有很多,前后轴质量和承载变化是其中重要因素。
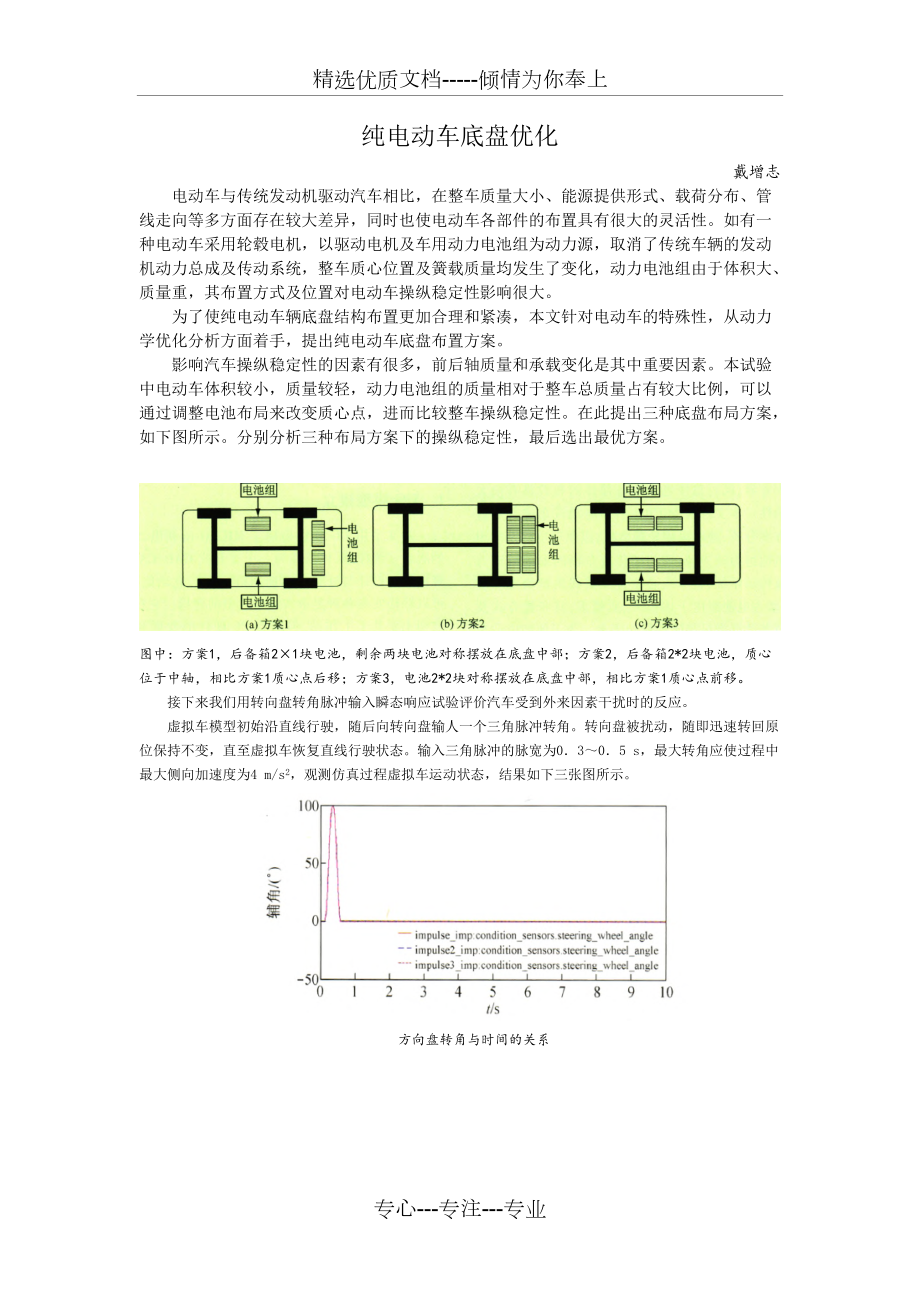
2、本试验中电动车体积较小,质量较轻,动力电池组的质量相对于整车总质量占有较大比例,可以通过调整电池布局来改变质心点,进而比较整车操纵稳定性。在此提出三种底盘布局方案,如下图所示。分别分析三种布局方案下的操纵稳定性,最后选出最优方案。图中:方案1,后备箱2×1块电池,剩余两块电池对称摆放在底盘中部;方案2,后备箱2*2块电池,质心位于中轴,相比方案1质心点后移;方案3,电池2*2块对称摆放在底盘中部,相比方案1质心点前移。接下来我们用转向盘转角脉冲输入瞬态响应试验评价汽车受到外来因素干扰时的反应。虚拟车模型初始沿直线行驶,随后向转向盘输人一个三角脉冲转角。转向盘被扰动,随即迅速转回原位保
3、持不变,直至虚拟车恢复直线行驶状态。输入三角脉冲的脉宽为0305 s,最大转角应使过程中最大侧向加速度为4 m/s2,观测仿真过程虚拟车运动状态,结果如下三张图所示。方向盘转角与时间的关系侧向加速度与时间的关系横摆角速度时间的关系考虑操纵稳定性,希望共振时的增幅比小些,共振频率较高,以使不同工况下失真度较小,可以达到相对较好的操纵稳定性;并希望相位差小些,以保证汽车有快速灵活的反应。从以上图中简单分析可以得出:对于峰值,方案3相对较低,其中横摆角速度与时间关系曲线较明显,侧向加速度峰值方案3较方案1要低4°s左右,较方案2约低25°s。对于共振频率与相位差,由图可看出:方案
4、3达到波峰时间最短,故方案3共振频率较高。由横摆角速度图的第一个波峰所对应的时间点与转向盘转角变化图波峰对应的时间点比较可知:方案3对应时间值相差较小,故方案3相位差较小。因此方案3的操纵稳定性较方案1、2有所提高。而电动汽车主动底盘系统,其中包括电动助力转向系统(Electrical Power Steering System,简称EPS)、防抱死制动系统(Anti-lock Brake System,简称ABS)、主动悬架系统(Active Suspension System,简称ASS)等,单独控制各子系统极容易相互干扰,造成整车性能不稳定。针对这种问题,我们可以应用集成控制的思想,进行
5、分层集成控制,以实现了整车性能的优化。EPS是一种利用助力电机对汽车转向进行助力,以提高转向轻便性和操纵稳定性的电控装置。ASS是一种可根据外界条件的变化来自适应改变悬架刚度及阻尼系数,以提高行驶平顺性和操纵稳定性的电控装置。对于同时装有这两大系统的车辆,其整车动力学性能得以很好地改善。但对这二者的应用,并不是简单地叠加,而是要进行集成控制,使它们相互协调,以达到综合性能最优的目的。EPSASS集成控制由于考虑了整车性能的相互协调和影响,标称集成系统控制、集成系统控制效果都比单独EPS控制或者单独ASS系统控制要好。集成控制使EPS和ASS两大系统趋于整体优化。由于汽车的行驶条件复杂,外界干扰
6、因素较多,而且存在模型的不确定性,所以采用鲁棒性较强的H控制方法较为合适。对于装有EPS和ASS的集成系统,其控制目的如下:提高整车的转向轻便性,减小转向盘操纵转矩TA,同时又有满意的路感;使车身横摆角速度、车身侧倾角和质心侧偏角尽快趋于稳态,并且尽量减小其稳态的波动,以提高整车操纵稳定性;减小车身垂直加速度,俯仰角和悬架动挠度的波动,最大限度地减少由于转向和路面不平所引起的车身姿态的变化,改善整车平顺性。采用Matlab软件对系统进行仿真计算,设定汽车行驶速度为u=15 ms,转向盘转角阶跃输入为h=120°。仿真所用汽车主要结构参数见下表。操纵转矩仿真结果在转向盘转角为120&#
7、176;的情况下,相对单ASS控制,单EPS控制、标称集成系统控制和集成系统控制,转向盘最大操纵转矩减小了181,稳态值减小了204,响应时间也相应减少了444,375和583,这样在保证驾驶员操纵轻便性的同时又不丧失路感。在操纵稳定性方面,仿真结果见下表。操纵稳定性仿真结果集成系统控制相对其它控制来说,质心侧偏角、横摆角速度和整车侧倾角的瞬态性能均有所改善。而且其稳态部分的波动都有所减小,其稳态性能也得到了改善。由此可见,EPSASS集成控制由于考虑了整车性能的相互协调和影响,标称集成系统控制、集成系统、控制效果都比单独EPS控制或者单独ASS系统控制要好。集成控制使EPS和ASS两大系统趋
8、于整体优化。另外,相比较集成系统控制与标称集成系统控制的仿真结果可以看出,建模时考虑到系统中存在的非线性因素,还是有必要的。对基于横向和垂向动力学的EPS与ASS非线性数学模型进行转化,用线性鲁棒控制方法,设计了输出反馈H。实现了两者的集成控制。通过对仿真结果的分析,可以得到以下结论:(1)将非线性项作为模型的结构不确定性来处理,保证了一定的精确度,取得了预期的控制效果。(2)在路面随机干扰和转向盘角阶跃干扰输入情况下,控制器有效地抑制了车身姿态变化,改善了汽车操纵稳定性和行驶平顺性。(3)集成控制协调了EPS和ASS两者之间的工作,实现了整车性能的优化。参考文献:虚拟车仿真实验数据参考:基于UGADAMS的纯电动汽车底盘结构优化,史业,北京交通大学EPS/ASS集成协调控制仿真数据参考:汽车电动助力转向与主动悬架系统的H集成控制,陈无畏专心-专注-专业
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
