《两相大功率步进电机驱动控制电路设计》由会员分享,可在线阅读,更多相关《两相大功率步进电机驱动控制电路设计(9页珍藏版)》请在装配图网上搜索。
1、两相大功率步进电机驱动控制电路设计摘要:单片机结合电机专用控制芯片L297组成两相步进电机逻辑电路,控制大功率MO SFET管组成的H桥驱动电路,并采用R2110驱动功率管的栅极,简化了功率驱动线路。驱动电路实现了大功率恒流斩波驱动,同时采用细分控制方式,提高了控制精度;可用于大功率的自动化设备中。 关键词:步进电机:细分控制:L297;R21100引 言 步进电机作为一种高精度的执行元件,广泛应用于各种自动化控制系统中。随着现代技术的发展,步进电机驱动与控制电路由分立元件向专用集成电路发展,不但给步进电机控制带来极大方便,而且体积缩小,成本降低
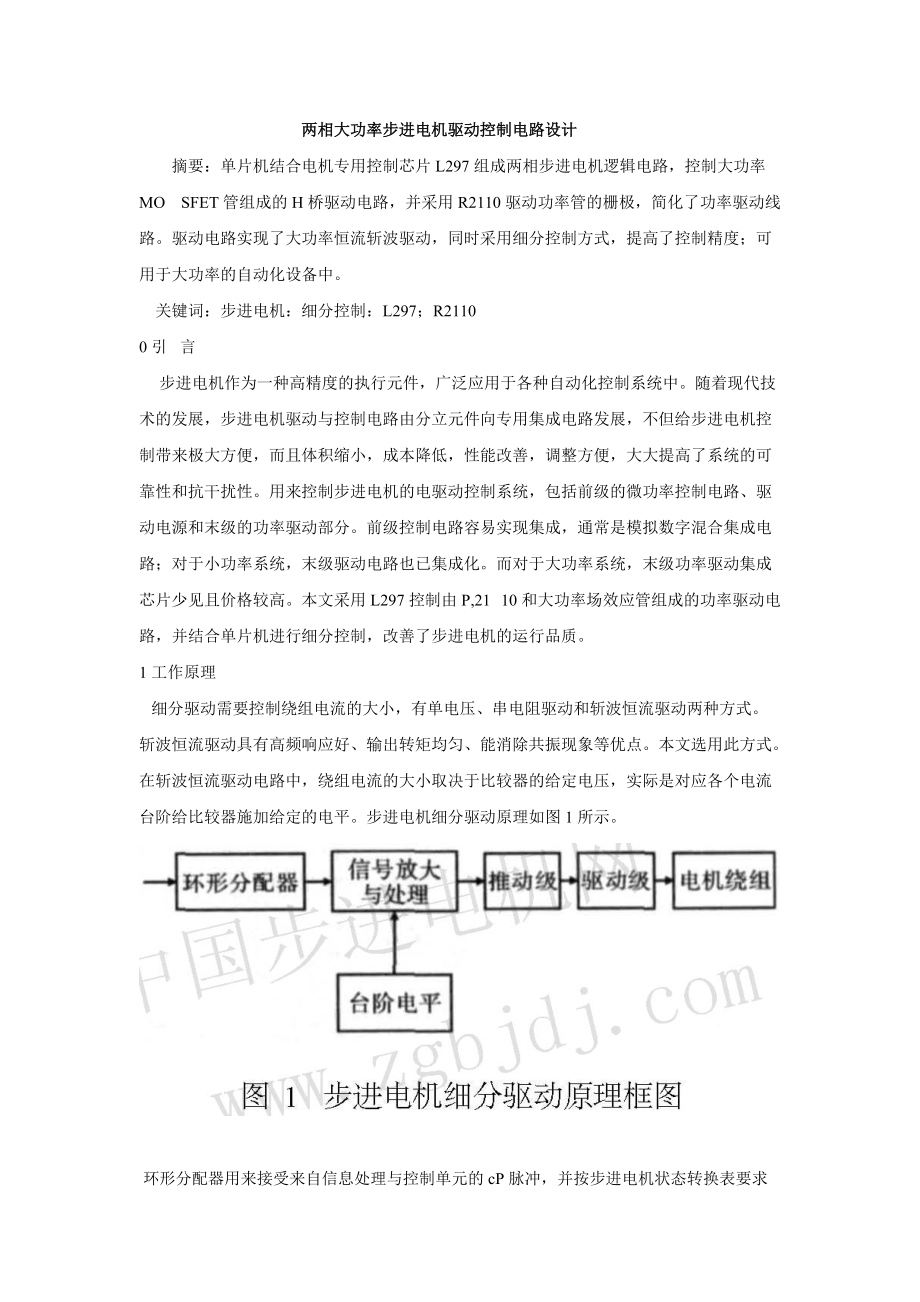
2、,性能改善,调整方便,大大提高了系统的可靠性和抗干扰性。用来控制步进电机的电驱动控制系统,包括前级的微功率控制电路、驱动电源和末级的功率驱动部分。前级控制电路容易实现集成,通常是模拟数字混合集成电路;对于小功率系统,末级驱动电路也已集成化。而对于大功率系统,末级功率驱动集成芯片少见且价格较高。本文采用L297控制由P,21 10和大功率场效应管组成的功率驱动电路,并结合单片机进行细分控制,改善了步进电机的运行品质。1工作原理 细分驱动需要控制绕组电流的大小,有单电压、串电阻驱动和斩波恒流驱动两种方式。斩波恒流驱动具有高频响应好、输出转矩均匀、能消除共振现象等优点。本文选用此方式。在
3、斩波恒流驱动电路中,绕组电流的大小取决于比较器的给定电压,实际是对应各个电流台阶给比较器施加给定的电平。步进电机细分驱动原理如图1所示。 环形分配器用来接受来自信息处理与控制单元的cP脉冲,并按步进电机状态转换表要求的状态顺序产生各相导通或截止的信号。每来一个脉冲,环形分配器的输出就转换一次。从环形分配器输出的各相导通或截止的信号送入信号放大和处理级,结合给定的台阶电平,输出有效的控制信号送入推动级。这中间一般既需要电压放大,也需要电流放大。信号处理实现信号的转换和合成功能,产生斩波、抑制等特殊功能的信号,从而产生特殊功能的驱动。推动级将信号进一
4、步放大送入驱动级,有时它还具有电平转换的作用。2硬件电路 本文设计的两相步进电机驱动硬件电路框图如图2所示。 图2两相步进电机驱动框图21逻辑控制电路 应用L297可以很方便地对步进电机进行控制。L297适用于双极生两相步进电机或者单极性四相步进电机的控制。它的输出信号驱动功率电路。此器件只需要时钟、方向和模式输入信号,相位由内部产生,可减轻微处理器的负担和程序设计量。 L297的核心部分是一组译码器。它能产生各种所需的相序,有方向(ccc)和HALFFULL及时钟cP输入,将译码器从一
5、阶梯推进至另一阶梯。译码器有4个输出点连接到输出逻辑部分,提供抑制和斩波功能所需的相序。L297另一个重要组成是两个控制相绕组电流的FWM斩波器,以获得良好的矩频特性。每个斩波器由一个比较器、一个Rs触发器和外接采样电阻组成,并设有一个公用振荡器,向两个斩波器提供触发脉冲信号。当时钟振荡器脉冲使触发器置l、电机绕组相电流上升,采样电阻尺。上电压上升到基准电压肘,比较器翻转,使触发器复位,功率晶体管关断,电流下降,等待下一个振荡脉冲的到来。这样,触发器输出的是恒频1WM信号,调制L297的输出信号,绕组相电流峰值由f。确定。f。由Mcu发出数字命令经DAc转换得到从而方便地获得阶梯电压,产生阶梯
6、电流。此外L297也对电动机转向和转矩进行控制。 由于步进电机在转速较高、变化较大的场合下有失步或堵转的现象,在低速时甚至会振荡”。为了改善其运行品质,采用细分控制方法。步进原理即是按一定的顺序向各个绕组通电流脉冲,以产生旋转力矩带动转子旋转。细分驱动就是当相邻的两相或多相绕组同时通电时,将原本一次到位的各相电流插入若干中间状态,分成阶梯,将离散变化的数字量连续化心。利用单片机和两片L297即可组成细分电路。在电路设计中采用单片机产生与L297相序一致的细分参考电压p 0,由P0口输出相应的数组值经DA(20832的数模转换后送给L297。转换电路如图3所示
7、。采用双缓冲方式接口,同步输出两组值。分别送给两片L297的参考电压脚。 由两片L297分别产生细分控制两个回路需要的逻辑信号,如图4所示。其中尺4和尺5分别是两个回路的检测电阻。vl和v2是经DA转换得到的所需的台阶电平。22功率驱动电路 由于两相步进电机双极性驱动效率比单极性驱动要高,故采用双H桥驱动结构。开关管选用功率MOsFET(RF450)。它的特点是开关频率高,最高可达几百千赫。峰值电压达到500 v,峰值电流达到14 A。完全满足大功率步进电机的需求。RF450的驱动电路采用R2110栅极驱动器。该芯片是一种双通道、栅极驱动、高压高速
8、功率器件的单片式集成驱动模块。在芯片中采用了高度集成的电平转换技术,大大简化了逻辑电路对功率器件的控制要求,同时提高了驱动电路的可靠性。尤其是上管采用外部白举电容上电,使得驱动电源数目较其他驱动大大减少。 IR2110的主要特性有口:内部应用自举技术未实现同一集成电路,可同时输出两个驱动逆变桥中高压侧和低压侧的通道信号。它的内部为自举操作设计了悬浮电源,悬浮电源保证了直接可用于母线电压为4 v、500 v的系统中未驱动功率。MOSFET或I(BT。同时器件本身允许驱动信号的电压上升率达50 p s、+50 vs,故保证了芯片自身有整形功能,实现了不论其输入信
9、号前沿的陡度如何,都可保证加到被驱动MOsFET或113BT栅极上的驱动信号前后沿很陡,这样可极大地减少被驱动功率器件的开关时间,降低开关损耗。器件的功耗很小,可极大地减少应用它来驱动MO s器件时栅极驱动电路的电源容量。从而减小栅极驱动电路的体积和尺寸。R2110的合理设计,使其输入级电源与输出级电源可应用不同的电压值,这样就保证了其输入与(MOs或T电平兼容,而输出具有较宽的驱动电压范围。而且它身可对输入的两个通道信号之间产生合适的延时,保证了加到被驱动的逆变桥中同桥臂上的两个功率器件的驱动信号之间有一互锁时间间隔,因而防止了被驱动的逆变桥中两个功率器件同时导通,发生直流电源直通而短路的危
10、险。 功率驱动电路如图5所示。栅极驱动部分中(112为自举电容vCc经Dll、(112以及下端的开关管给(112充电,以确保下管关闭、上管导通时,上管的栅极靠(112上足够的储能未驱动。在IR2110上侧和下侧的输出端分别加一个电阻,确保上下管不会直通,并且在功率管的栅极加稳压二极管作为保护,以免高压损坏功率管。右侧结构与左侧对称。主驱动电路采用两个独立的H桥结构。每个桥由4个功率管组成。每个功率管上都反向并联一只二极管作为续流使用。左上管和右下管导通时,电流经左上管电机绕组右下管到地,右上管和左下管导通时,电流经右上管电机绕组左下管到地,电机绕组中流过方向
11、相反的电流。3软件组成 两相步进电机基本的控制方式有三种: 其中,+A+B和AB分别代表A相和B相正 整步: 向通电和反向通电。整步工作方式和半步工作方单相励磁两拍:+A +B A B。 式都可以由L297方便的实现。而半步工作状态的双相励磁两拍: +A+B +BA AB �
12、60; 步距角小,更有利于细分控制。以半步工作方式B+A。 为例,4细分时各相通电时序图如图6。由于使用了L297来实现相序分配,使软件的工作量大大减少,并且提高了系统的可靠性。由此根据时序图就可以很容易地编写出步进电机的控制程序,固化在单片机中在中断程序里调用。系统程序框图如图7所示。 以P11作为L297皿OcK的输入,P10和P13分别为C和HALF引脚的输入,在模式初始化中选择步进电机的工作方式和转向。外部脉冲从单片机的外部中断口送入,在中断程序中进行计
13、数,查表,输出有效数据,这样使得步进电机驱动控制电路能够更好的与其他用途接口,方便地进行调速控制。4结论 由单片机和L297组成逻辑控制电路,只需要较少的输入信号,相位由L297内部产生,减轻了片机和程序设计的负担。用两片L297分别控制两相步进电机的两个绕组,由单片机输出根据相序得到的数据,经DA转换送到L297实现了细分控制,能够实现256细分,有效地改善了步进电机的运行品质。可以在应用中根据实际情况选择细分数。而由R2110和大功率MOsFET管组成的功率电路可以驱动大电压、大电流的步进电机,具有快速完整的保护功能,极大地缩小了印制电路板尺寸。该系统简单可靠,能够用于大功率自动化设备中。参考文献1宋受俊,刘景林,韩英桃,张智慧两相混合式步进电机驱动器的优化设计电气传动,2002 (2):59_642孙兴进,曹广益,朱新坚步进电动机的最佳细分控制自动化与仪器仪表,2001,(1):33_363王鹏飞,尤波基于L297L298混合式步进电机驱动器的研制哈尔滨理工大学学报,2003,(8):40一43【4】楚斌 R2110功率驱动集成芯片应用 电子工程师I Jll2004 10:33_355李玲娟多细分两相混合式步进电机驱动器的研制D西北工业大学,2007
 两相大功率步进电机驱动控制电路设计
两相大功率步进电机驱动控制电路设计