 基于单片机的XY平台控制系统的设计
基于单片机的XY平台控制系统的设计

《基于单片机的XY平台控制系统的设计》由会员分享,可在线阅读,更多相关《基于单片机的XY平台控制系统的设计(4页珍藏版)》请在装配图网上搜索。
1、基于单片机的XY平台控制系统的设计王安敏 牛传猛 崔伟(青岛科技大学,机电工程学院,青岛,266061)摘要:为实现X-Y二维工作平台的精确定位,以容栅传感器作为位置检测环节,实时的将工作台的运动状态反馈给单片机,单片机根据设定程序对两个方向的步进电机进行闭环控制。通过将容栅传感器输出的串行信号转换成并行信号的方法,方便地实现了单片机对容栅传感器输出信号的处理。试验证明,这种控制方法能实现工作平台的精确定位,具有较高的实用价值。关键词:步进电机 单片机 容栅传感器 闭环控制中图分类号:TM383 文献标识码:ADesign Of X-Y Motion Platform Contrle Syst
2、em Based On Single-chip MicrocomputerWang An-min Niu Chuan-meng Cui wei(Mechanical manufacture and automation, Qingdao University of Science Technology, Qingdao, 266061)Abstract: In order to realize the accurate point control of the X-Y motion platform ,using the capacitive sensor as the position de
3、tection segment . The capacitive sensor feeds the platforms situition back to the single chip timely so that two direction motors can be closed-loop controled by the single chips through the setted program . The single chip can process the serial signal outputing from capacitive sensor easly through
4、 method of transforming serial signal to parallel Signal . This controlling mathod was proved to be highly worthy to realize the accurate point control of the platform by experiment .Keyword:Stepping motor ; Single chip ; Capative sensor ; Close-loop control 0 引言在对X-Y两轴运动的工作平台进行控制时一般采用单片机为主控制单元对X-Y两
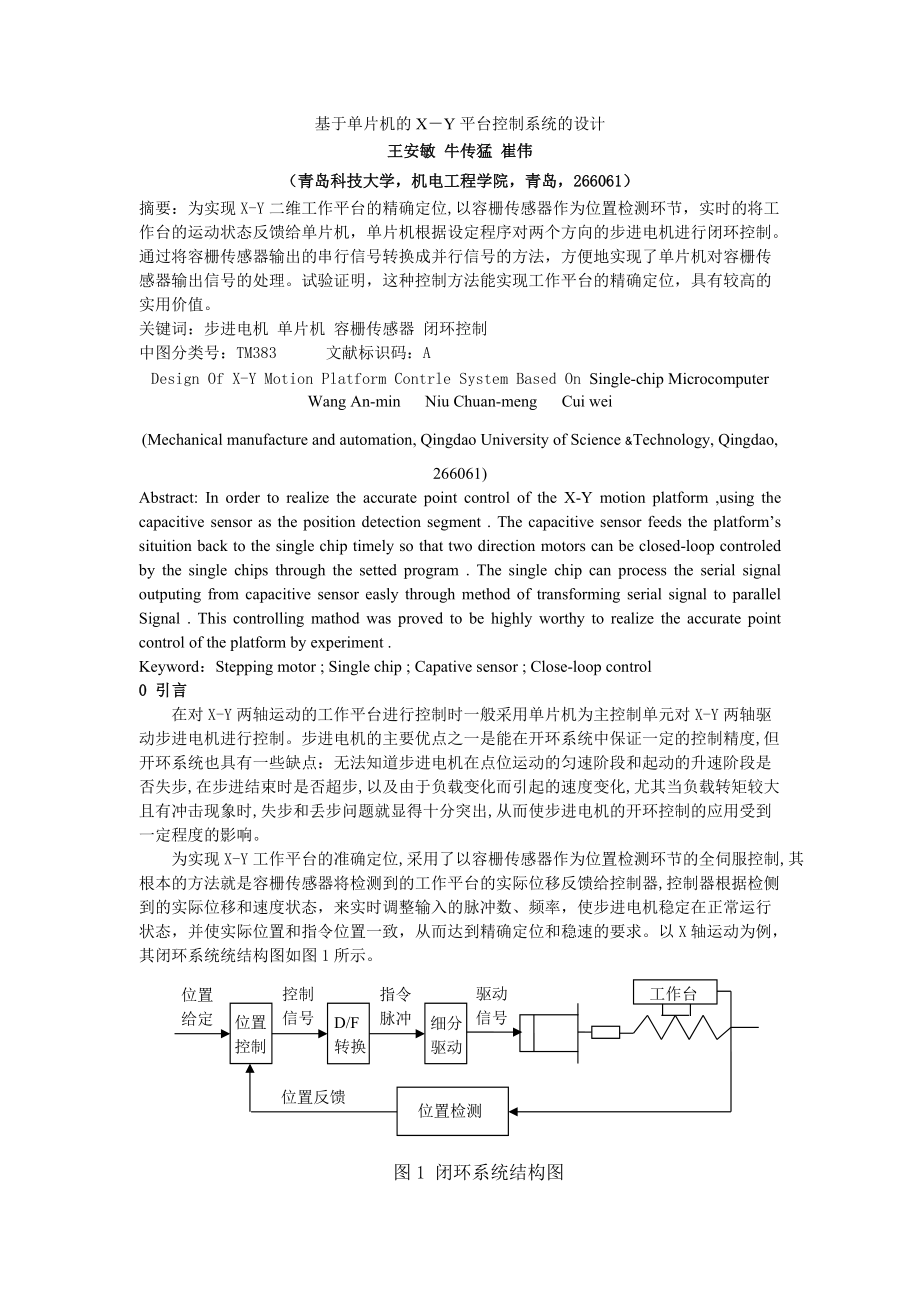
5、轴驱动步进电机进行控制。步进电机的主要优点之一是能在开环系统中保证一定的控制精度,但开环系统也具有一些缺点:无法知道步进电机在点位运动的匀速阶段和起动的升速阶段是否失步,在步进结束时是否超步,以及由于负载变化而引起的速度变化,尤其当负载转矩较大且有冲击现象时,失步和丢步问题就显得十分突出,从而使步进电机的开环控制的应用受到一定程度的影响。为实现X-Y工作平台的准确定位,采用了以容栅传感器作为位置检测环节的全伺服控制,其根本的方法就是容栅传感器将检测到的工作平台的实际位移反馈给控制器,控制器根据检侧到的实际位移和速度状态,来实时调整输入的脉冲数、频率,使步进电机稳定在正常运行状态,并使实际位置和
6、指令位置一致,从而达到精确定位和稳速的要求。以X轴运动为例,其闭环系统统结构图如图1所示。位置控制控制信号位置给定指令脉冲细分驱动驱动信号D/F转换工作台位置检测位置反馈图1 闭环系统结构图1 硬件组成该系统是一个两级的控制系统,上位系统主要由一台586PC机构成,下位控制系统由两块AT89C52单片机组成,如图2所示。上位机主要负责二维定位平台运动位置的采集和控制下位单片机;下位单片机分别完成一路步进电机驱动、解读容栅位移传感器输入信号、限位开关输入信号、和PC机进行通信。PC机与两单片机之间通过RS232串行接口通信,其中X轴单片机控制平台X方向运动的步进电机,与PC机的串口1(COM1)
7、相连,Y轴单片机控制平台Y方向运动的步进电机,与PC机的串口2(COM)相连。平台X、Y方向分别装有容栅式位移传感器,经串并接口转换后分别和单片机相连,将平台的运动状态反馈给单片机。为了防止工作平台运动出界,在X,Y两轴的极端位置分别设置了限位开关,可以在平台超出运动范围时自动切断电机的电源,使平台停止运动。单片机采用近年来市场上比较流行的AT89C52单片机,它采用CHMOS工艺及高密度、非易失存储技术制造,与80C51引脚和指令系统完全兼容。开关采用OMRON公司的接近开关TLQ5MF1,它的输入是12V24V电压,属常闭型开关。由于选用的步进电机的工作电压为24V,因此我们将接近开关的输
8、出作为步进电机的工作电压输入,可以在平台超出运动的极限位置后,由接近开关自动切断步进电机的电源使平台停止运动。步进电机驱动器采用常州泽明自动化设备有限公司出品的WZM-2H042M型驱动器,该驱动器采用原装进口模块,实现高频斩波,恒流驱动,具有很强的抗干扰性、高频性能好、起动频率高、控制信号与内部信号实现光电隔离、电流可选、结构简单、运行平稳、可靠性好、噪声小,并可实现细分驱动。PC机AT89C52(X轴)AT89C52(Y轴)光电隔离光电隔离X轴限位开关X轴步进电机X轴容栅传感器Y轴步进电机Y轴容栅传感器Y轴限位开关图2 硬件组成2 电路设计容栅传感器输出为串行数据信号,其最大传输的速度可达
9、到100kB/s。如果直接采用直接同单片机进行串行通讯的方式,势必会导致单片机忙于接收传感器所发来的数据,而无法处理其它的任务。为了解决这一问题,本系统采用了串并转换的方法加以解决,将传感器输出的串行数据转换成并行数据,然后再进行相应的数据处理。为了实现数据的串并转换,本系统采用了74ls164串人/并出移位寄存器来完成从串行信号到并行信号的转变。由于容栅传感器的输出串行信号分为前后两组,每组分别有24位二进制数字,而74ls164最多只能存储8位数字。本系统为了能完成信号串并转换,所以采用了3片74ls164芯片串联起来,从而实现24位有效数字的转换,其电路如图3所示。从图3所示的电路图中,
10、可以看到除U1之外,每片74ls164的最高位都与前一片的A.B端相联,而U3的A.B端直接与经过电平变化后的传感器串行输出信号Data1相联。另一方面74ls164以容栅传感器输出的时钟信号CLK做为移位控制信号。时钟信号CLK在输入到移位寄存器之前,经过与串行信号相似的电平转换电路,在此就不重复叙述了。移位寄存器的引脚CLK高电平有效,可以将输出端上所有的数字清零。它是有信号ST与单片机的引脚P1.0控制的。两个信号同时为低的时候,移位寄存器清零。当串行数据经移位寄存器转化成为并行数据后送入锁存器中。这是由于所有的24位有效数字全部通过单片机的P0口输入,而P0口只有8位。为了使数据读入,
11、电路中采用3片锁存器(U4-U6)分别与移位寄存器(U1-U3)相联,将24为有效数字存储在其中,以便数据被依次读入。本系统采用线选法来控制数据的写入,单片机P1口的P1.1、P1.2和P1.3分别与U4-U6的引脚相联,通过此引脚选通相应的锁存芯片。图3 串并转换电路3 软件设计软件主要部分框图如图4所示。为简化起见,X、Y两轴控制只画出一路。图4(1)是PC机工作流程。初始化完成后,检测是否给定平台所需要到达的目标点坐标值,根据程序计算步进电机运动方向、运动步数、脉冲频率等,并存储在非遗失型RAM中。图4(2)是单片机工作流程。初始化完成后,等待主机发来的控制命令,驱动步进电机工作,同时检
12、测容栅传感器和限位开关的状态,对步进电机进行系统闭环控制。主机初始化有给定坐标根据设定程序计算步进电机运动方向、移动步数及步进频率等,通过RS232接口分别和X、Y轴单片机进行通信,下传相应命令,并将X、Y两轴的最新位置存储在RAM中。YESNO 单片机初始化根据主机传来的指令对步进电机进行细分驱动控制,同时检测容栅传感器,进行对比判断,实现闭环控制。限位开关用中断方式检测,保证工作台的安全。主机有命令NOYES (1) (2) 图 4 程序主要模块框图4 结束语本文着重介绍了一种基于二维定位平台的步进电机闭环系统的硬件和软件设计,并重点介绍了容栅传感器与单片机通信的串并转换电路设计。该系统具
13、有结构简单、调速稳定、精度高、功能多、适应性强的特点,并在台球机自动摆球装置的应用中定位准确,运行效果良好, 系统投入使用以来,产生直接经济效益20余万元。本文作者创新点:采用容栅位移传感器实现步进电机闭环控制的位置反馈,并设计串并转换电路,将传感器输出的串行数据转换为并行数据送单片机处理。参考文献1 匡胤,唐年庆.基于单片机的新型步进电机运动控制器J .微计算机信息,2008,06-2:123-124。2 张荣,徐鸣谦.容栅旋转编码器原理及应用.传感器世界.2006(2):21-24。3 张福学.实用传感器手册.北京:电子工业出版社,1998。4 王福瑞.单片微机测控系统设计大全.北京:北京
14、航空航天大学出版社,1998。5 王晓明.电动机的单片机控制M.北京:北京航空航天大学出版社,2002。王安敏(1960- ),男,黑龙江集贤县人,工学博士,教授,系主任,主要研究方向为光机电一体化、机电系统计算机控制技术及计算机辅助测试技术,发表论文30余篇。牛传猛(1984-),男,山东聊城人,青岛科技大学在读研究生。Biography: Wang An-min(1960-),male(han), born in 1960 in Laizhou, Shandong province, PH.D., professor of Qingdao University of Science Technology, research field: computer control of electromechanical system通讯地址:青岛科技大学东部校区352#信箱 牛传猛(收) 邮编:266061联系电话:13589227475E-mail:qdniu1984
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
