 ULN2003驱动步进电机
ULN2003驱动步进电机

《ULN2003驱动步进电机》由会员分享,可在线阅读,更多相关《ULN2003驱动步进电机(5页珍藏版)》请在装配图网上搜索。
1、专题特写:马达与控制基于GAL16V8和ULN2003的步进电机驱动器的设计利用阵列逻辑器件 GALINS!电机实现控制, 给出了8 9C单片机控制的硬件、软件设计实例任明岩 孙金英可擦除的PL器件,可以用来构成译码 器、优先级编码器、多路开关、比较器、3 4今日电子 ?2007年6月专题特写:马达与控制引言在医学检验中经常用到微孔板作为 测量载体,为提高测量的定位准确度和 运行的平稳性,需要进行 Y方向及X方 向顺序运动,采用步进电机进行驱动是 很好的选择。AT89C和5GAL16 简介AT89C是 Atm(公司的低电压、中断口,2个1位可编程定时计数器,2 个全双工串行通信口, 2个读写口
2、线,片 内时钟电路。AT89C采用两种软件控 制其进入省电睡眠模式的静态逻辑工作 闲置方式设计,可以用RAM、定时/计数器、串行口和外部中断唤醒睡眠状态 而继续工作,在睡眠模式下,RAM 被冻 结,其他功能全部停止,直至下个外中断触发或硬件复位方可开始运行。特别 移位寄存器、计数器、总线仲裁器等。采 用GAL16器件对两相和四相混和式 步进电机进行控制,不仅简化了系统的 结构,降低了成本,而且编程灵活方便, 提高了系统的可靠性,使系统具有更强 的适应性。硬件设计本设计选用 GAL16为环形脉冲3 #今日电子 ?2007年6月专题特写:马达与控制分配器,ULN 2 0 0 3 (国产型号为5G1
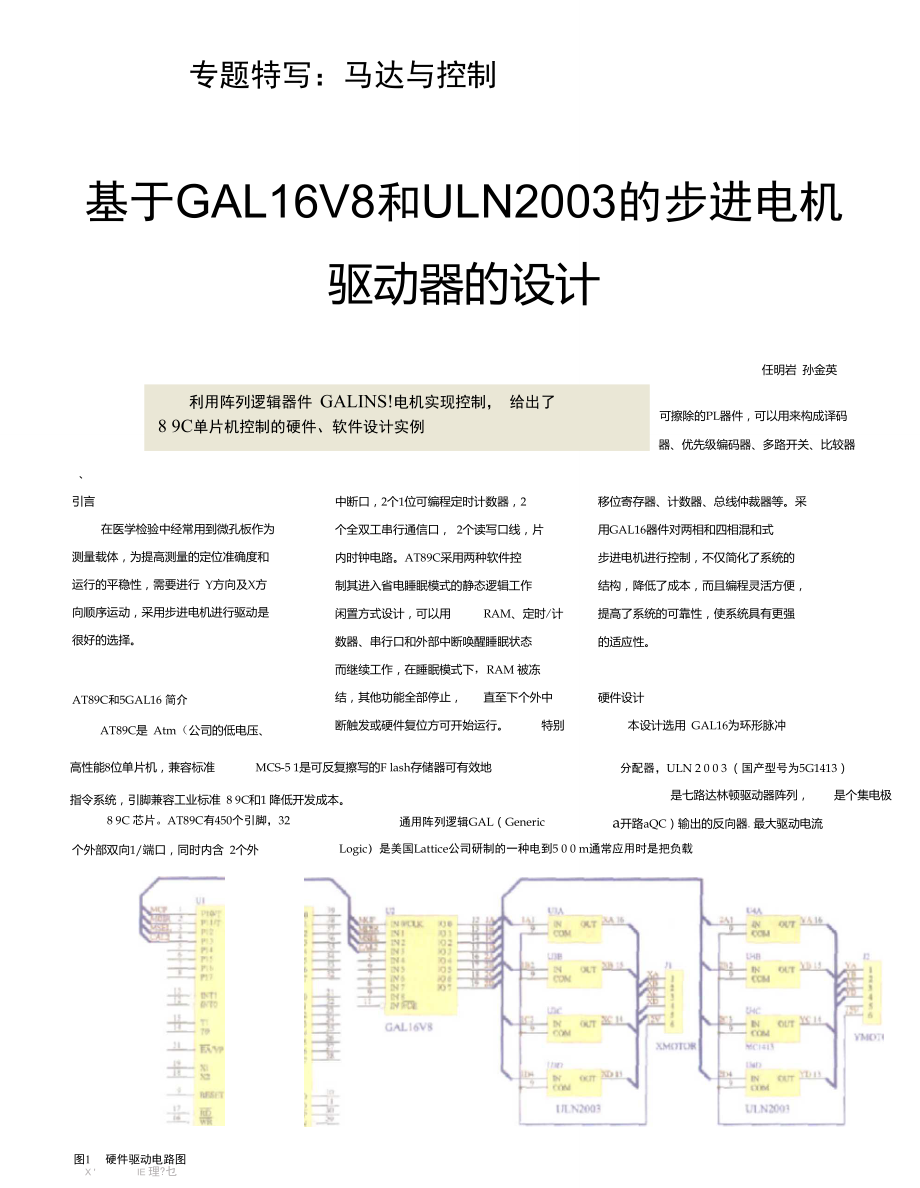
3、413)是七路达林顿驱动器阵列,是个集电极高性能8位单片机,兼容标准MCS-5 1是可反复擦写的F lash存储器可有效地指令系统,引脚兼容工业标准 8 9C和1 降低开发成本。3 #今日电子 ?2007年6月专题特写:马达与控制3 #今日电子 ?2007年6月专题特写:马达与控制8 9C 芯片。AT89C有450个引脚,32通用阵列逻辑GAL(Generica开路aQC)输出的反向器.最大驱动电流3 #今日电子 ?2007年6月专题特写:马达与控制3 #今日电子 ?2007年6月专题特写:马达与控制个外部双向1/端口,同时内含 2个外图1硬件驱动电路图X IE 理?乜Logic)是美国Lat
4、tice公司研制的一种电到5 0 0 m通常应用时是把负载3 5今日电子 ?2007年6月专题特写:马达与控制1 3 6今日电子 ?2007年6月专题特写:马达与控制1 步进电机的一端接到VDD(12V)上,另F6 =D1&D2&! D3&D4;汇编原码如下一端接到输岀引脚上,如16脚。为了防F5 =D1&D2&! D3&! D4;MOV12O:MOVR3,#5止程序进入死循环,增加了外部的硬件F4 =D1&! D2&D3&D4;MOV121:LCALLMOV12看门狗定时器 MAX8 13L,其内部的看F3 =D1&! D2&D 3&! D4;12行前进程序1门狗定时器监控 UP/UC的工作
5、。如果F2 =D1&! D2 & D3&D4;DJNZ R3,MOV121在1 .6s内未检测到其工作,内部的定时F1 =D1& !D2 &!D3&!D4; MO VP1,#OH ;电机失电器将使看门狗输岀WDO处于低电平状endmotor。MOV RO, # 1O O设置软件陷阱RDO 8:4态,WDO将保持低电平直到在 WDI检LCALL DELY测到UP/UC的工作。将 WR和WDO当程序进入到非程序区,只要在非DJNZRO, RDO8连接可使看门狗超时产生复位。采用两程序区设置拦截措施,使程序进入陷M0V8 O:MOVR3, #13H片U LN2O分别驱动X、Y方向的步进阱,然后强迫程
6、序回到初始状态。如对MOV2CH, # 8列前进程序1电机。具体硬件电路如图 1所示。CPU的R ST指令对应的字节码为MOV81 :LCALL MOV84软件设计步进电机的脉冲控制通常是由逻辑电路实现的。在计算机控制的系统中,可以通过编制程序,由扩展1/口输岀脉冲来决定电机的运行方式、方向及转速,但这种方式占用 CPU的时间过多。GA器件有多种型号,根据设计的需要,同时从经济的角度考虑,选用GALl来实现四相混和式步进电机进行控制。使用abeL言编程,源码如下。modulmottitleOperaof thedevtcesi thmotoDATAorp.FBIdevtD1,D2,D3,D4
7、pF1,F2,F3,F4,F5,OFFH如果不用的程序存储区预先写入OFFH,则当程序因干扰而“飞”到该区域执行代码时,就相当于执行RS指令,从而达到系统复位的目的。程序流程如图2所示。1smuV8F6,DJNZ R3 , MOV8 1MO V P 1, #OH ;电机失电MOV RO, # 1OHRDO9:单孔程序lcall ;测量Elyn列前进程序21O 2OO2DJNZRO, RDO 9setbeto ;开定时器oLCALL CQT单孔测量程序CLRET O关定时器OLCALLQUITINC2 DHLCALLD1 OMS;延时 1msLCALLD1 OMS;延时 1msMOV8 5:MO
8、VR4, #OCH;8,3,4,5; 如F7,F8 pin19,18,17,16,15,14,13,12;i;L-l fl titr 书”equationsF8 = D1&D2&D3&D4;F 7 = D1&D2&D3&! D4;MOV8 3: LCALL MOV8 6DJNZR4, MOV8 3MOVP1, #OHMOVRO, # 1 OHRDO 3:LCALLDELYDJNZRO, RDO 3SETBETO;开定时器OLCALL COTP;单孔测量程序3 #今日电子 ?2007年6月专题特写:马达与控制1 3 #今日电子 ?2007年6月专题特写:马达与控制1 (下转第4 4页)3 7今日
9、电子 ?2007年6月专题特写:马达与控制CLRET关定时器0LCALLBK12 0MOV2DH, #0LCALLQUITLCALLLOCKOFFINC2EHINC2DHRD0 2:LCALL; BK列后 0DJNZR7, MOV8 0;循环行数次LCALLD 1 0MS;延时 1ms退程序LCALLD1 0MSMOVR0, #25 0结论DJNZ2CH,MO测量,5循环RD0A:LCALL DELY采用此设计的步进电机驱动系统具7次,LCALLDELY有运动平稳、速度快、控制精度高等优CJNER7, #1, RD02 ;判断测DJNZR0, RD0A点,已应用于单光子分析计数仪的驱动量是否完
10、毕RD0 1:MOV R5, #0BH系统。POP0 7HMOV123:LCALLMO1212C5行前进程序2参考文献SETBP3. 3; P 3. 3=1 h i gh1石亚和.单片计算机接口技术.东北大voltage =450VDJNZR5,MOV123学自动化仪表教研室.LCALL BK0测量行列完毕,MOVP 1, #0H;电机矢电2美国LatticeGA的16V8 da3美国AllegroU公司的2 0 0t ashe返回初始位置程丿予MOVA, R74 4今日电子?2007 年6月(上接第3页)asheet.圈嗟書障潇斌电遵酒離即Rl:1 3K,1%R2:1 0K,1%R3 :1K
11、,1%R4、R5 :1 0KR 6R7:0.3仗,1W, 1%Cl:4 70 0P%,5C2、C3:100 0PFC4:4 7F,50 VC5:0. |1 FD 1D 2、D3、D4D1FS4斩波频率理论值:f = 1/0. 72?4 7 0 0 ?1013 ? 1 03= 2 2.7 kHz;驱动电流理论值:I p= (5 X1)/(10+1 )X50%X(1/0.3 3)实际测量结果如图6,斩波频率为0.68马达能够平稳加速到一定的速度,或者减速到停止。加减速曲线一般有 2种:渐进式和 阶梯式。在汽车电动车窗的应用中, 阶 梯式在实际使用中效果更好。阶梯式加减速曲线见图5。应用实例应用实例的电路原理如图5所示,PWM设计值为5 0%,所使用的器件参 数如下。Ul: MTD20 0 5FU2: 7 4HCT0 72 3kHz,驱动电流为0 0mA,符合设计要求。参考文献山 SHINDENGEN公司的MTD20C5F数据资料L FUIronic0 Vincenzo Marano. DUA DRIVERS.STMicroelect 档AN1762.
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
