《微小卫星飞行姿态动环境规划算法研究》由会员分享,可在线阅读,更多相关《微小卫星飞行姿态动环境规划算法研究(3页珍藏版)》请在装配图网上搜索。
1、微小卫星飞行姿态动环境规划算法研究 摘要:为了提高微小卫星的使用效率和生存能力,关键是提高微小卫星的低可观测特性,设计了一种以混沌算法和粒子群算法为根底的微小卫星低可观测飞行姿态动环境规划算法。通过对微小卫星飞行中的俯仰角和方位角等姿态角进行实时调整,可以有效降卑微小卫星在威胁雷达方向上的RCS值,提高微小卫星的低可观测特性。粒子群优化PSO算法可以降低计算复杂度以提高规划的实时特性,参加混沌chaos运动可以提高算法的精确程度。通过对工作频率在VHF波段的威胁雷达对微小卫星的威胁性进行仿真,结果显示规划后微小卫星的低可观测性能明显改善,满足飞行姿态规划的需求。关键词:微小卫星;姿态规划;低可
2、观测性;混沌算法;粒子群优化算法中图分类号:TN927?34文献标识码:A文章编号:1004?373X202107?0001?060引言随着微小卫星在侦察、导航、数据中继及早期预警等领域得到越来越广泛的应用,微小卫星的平安性能也越来越得到重视。空间探测设备,反卫星武器的快速开展越来越多地限制了微小卫星的使用1?3。为提高在轨微小卫星的使用效能及生存能力,对其进行低可观测性设计是一个有效的方案。目前,对中、低轨卫星的探测主要由雷达完成,因此低可观测性设计中低雷达探测特性是关键。除了对微小卫星的外形进行低可观测外形设计外,对其进行适当的飞行姿态规划以提高其低可观测特性也很有必要4?5。对微小卫星的
3、飞行姿态规划可从静环境和动环境两个方面进行规划。静环境主要是指环境中的威胁分布和各威胁设备的威胁性均,可以精确地进行规划,有效地提高卫星的低可观测特性;动环境规划那么是规划前并不知道威胁分布,也不知道有哪些威胁设备及威胁设备的威胁性,只有当卫星处于当前位置时才获得该位置所对应的威胁设备的分布情况,所以需要对卫星在飞行过程中进行实时调整来降低卫星的低可观测性能。本文主要对微小卫星动环境规划进行研究。微小卫星姿态规划与无人机等的航迹规划的根本思想都是在一定的约束条件下寻找一种飞行方式,使无人机等所受到威胁最低,所以对微小卫星的姿态规划可以参考航迹规划方面的算法。目前国内外对路径规划算法的研究很多,
4、常见的有Dijkstra算法、A*算法及相关的改进A*算法【6】、概率地图方法ProbabilisticRoadmapMethod,PRM【7】、Voronoi图法8、快速扩展随机树算法RapidlyRandomExploringTrees,RRT9等以及智能优化算法如粒子群算法10,遗传算法11,混沌算法12等,前几种方法都属于图搜索算法,算法的实现需要知道威胁分布情况,对于动环境规划并不适用,所以本文采用智能优化算法对微小卫星低可观测飞行姿态进行动环境规划。1混沌优化算法混沌优化算法ChaosOptimizationAlgorithm的根本思想是把混沌变量从混沌空间映射到解空间,然后利用混
5、沌变量具有遍历性、随机性和规律性的特点进行搜索。混沌优化算法具有对初值敏感、易跳出局部极小、搜索速度快、计算精度高、全局渐近收敛的特点。混沌算法首先应使优化变量在空间中处于混沌状态,一般选用式1所示的Logisic映射来产生混沌变量,其中是控制参量。设0xn1,n=0,1,2,=4时,Logisic映射完全处于混沌状态12。混沌优化算法需要在混沌区间任意设定i个初值不能为方程1的不动点0.25,0.5,0.75作为i个初始混沌变量。xn+1=xn1-xn,0xn11设一类连续对象的优化问题为求函数最小值,如式2所示:minfxi,i=1,2,n;axib2采用混沌优化算法的根本步骤如下:1算法
6、初始化:给式1中的xn赋予i个大小在0,1之间的初值,可以得到i个变量xi.n+1,将这i个变量作为初始混沌变量;2首先初始化相应的性能指标,随机设定一个最优解xopt,fopt作为初始最优解,因为优化的是最小值,所以先初始化一个较大的fopt,保证fopt在接下来的迭代搜索中能取到当前优化问题的最优解;3用混沌变量进行迭代搜索;Step1:因为优化问题的变量区间为a,b,所以需要将i个混沌变量xi.n+1,按式3分别转化为i个混沌变量xi.n+1,xi.n+1在a,b之间:xi.n+1=a+b-axi.n+13Step2:用混沌变量xi.n+1进行迭代搜索,k是迭代次数,fik表示变量为xi
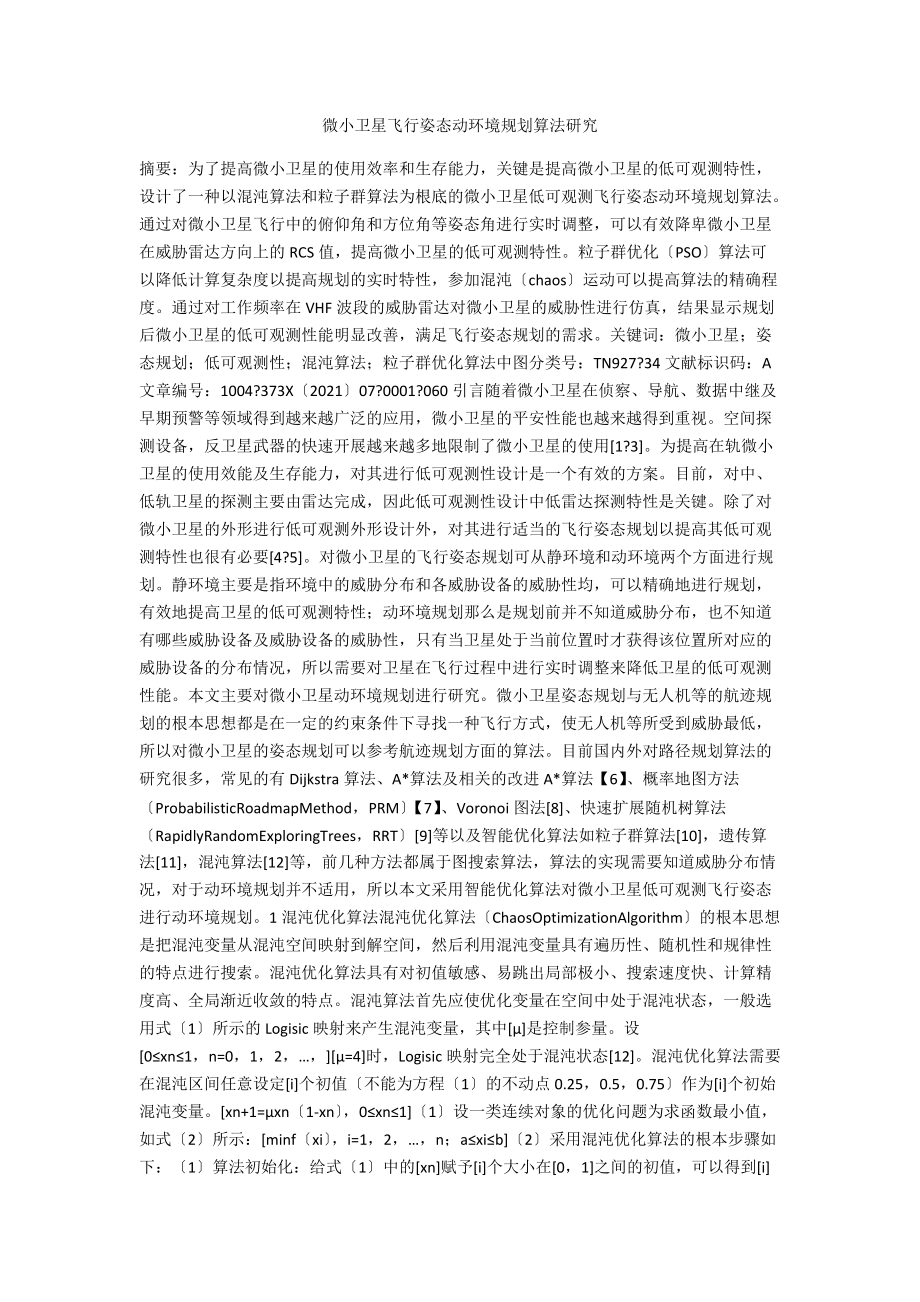
7、.n+1时的函数值。假设fikfopt,那么fopt=fik,xopt=xi.n+1,否那么不执行任何操作;Step3:k=k+1;Step4:将xi.n+1通过式3的逆运算转换回混沌变量区间0,1,即将xi.n+1转换回xi.n+1;Step5:将xi.n+1代入式1中的xn,继续进行混沌映射,得到新的混沌变量;Step6:重复步骤3,当fopt保持不变时,迭代搜索完成,输出xopt,fopt。图1为初始值分别为0.501和0.502两个点的混沌演化轨道,初始距离仅为0.001,采用Logistic映射迭代后,两个点逐渐别离。可以看出,前6次迭代两个点的距离还比较近,在图中表现为两个点根本重
8、合,当迭代次数超过7次后,两个点迅速别离,分别按照各自的混沌轨道运行。由此例可以看出混沌运动的初值敏感性和遍历性。图10.501和0.502两点的混沌演化轨道2粒子群优化算法粒子群优化算法ParticleSwarmOptimization,PSO是基于群体智能的一种进化计算方法。PSO算法中每个粒子就是解空间中的一个解,它根据自己的经历和整个粒子群的经历来调整自己。每个粒子在飞行过程的最好位置就是该粒子本身所找到的最优解。整个粒子群在飞行过程中经历的最好位置就是整个种群目前所找到的最优解。粒子本身的最优解叫做个体最优解pbest,整个粒子群体找到的最优解叫做全局最优解gbest。每个粒子根据上
9、述两个最优解结合更新公式不断更新自己,从而产生新一代粒子群体,粒子的“好坏程度由适应度函数来评价。与一般的进化算法相比,PSO概念简单、容易实现并且需要调整的参数少,目前广泛应用于各种优化领域。在PSO算法中,每个粒子可以看作是解空间中的一个点,假设粒子种群规模为N,那么第ii=1,2,N个粒子的位置可表示为Xi。粒子的位置即是适应度函数的变量,根据粒子位置及适应度函数可以计算出粒子的适应度,根据适应度判断粒子的“好坏程度。粒子所经历过的“最好位置记为pbesti,该粒子的更新速度用Vi来表示,粒子群体所经历的“最好的位置的用gbest表示,第i个粒子的速度和位置更新公式为:Vik+1=?Vi
10、k+c1?r1?pbesti-Xik+c2?r2?gbest-Xik4Xik+1=Xik+Vik+15式中:c1,c2为常数,称为学习因子;r1,r2是0,1上的随机数;称为惯性权重,同时粒子在更新自己的速度和位置的时候还受最大更新速度Vmax和最小更新速度Vmin的约束13?15,即ViVmax,Vmin。粒子群算法的步骤如下:1首先在搜索空间里初始化粒子种群。假设粒子种群规模为M,种群中的粒子记为Xi,粒子维数为n,表示为ai1,ai2,ain,即粒子在搜索空间中位置的坐标。同时初始化每个粒子的飞行速度V,也是一个n维向量Vi1,Vi2,Vin,其中i=1,2,M;2根据每个粒子的位置和适
11、应度函数,计算出每个粒子的适应度;3比较适应度的大小,将每个粒子的当前适应度与该粒子的个体最优解相比较,假设当前适应度优于个体最优解,那么用当前位置取代个体最优解的位置;否那么,个体最优解保持不变;4首先比较得出最优粒子,然后将该粒子的适应度与种群最优解比较,假设当前适应度优于种群最优解,那么用当前位置取代个体最优解的位置;否那么,种群最优解保持不变;5根据更新公式4,5来更新粒子的速度和位置;6重复步骤25,直到适应度函数到达最优或者满足迭代条件。3动环境规划算法设计3.1雷达分布及威胁水平计算模型由于雷达是低可观测微小卫星最主要的威胁,所以在威胁水平评估建模中,主要考虑雷达作为威胁设备。当卫星处于某一位置时,并不是地球上所有的雷达都对卫星具有威胁性,而只是在某一角度内的雷达才对卫星具有威胁性,如图2所示。为了计算出卫星在某一位置时的威胁性水平,首先应分辨出哪些雷达对卫星具有威胁性16。
 微小卫星飞行姿态动环境规划算法研究
微小卫星飞行姿态动环境规划算法研究