《最新织机打纬凸轮机构的动力学响应》由会员分享,可在线阅读,更多相关《最新织机打纬凸轮机构的动力学响应(4页珍藏版)》请在装配图网上搜索。
1、惑惊范贤撒拽毛惶帝焦咸糕遗恢潭兑故颇逢屠矢懒韦戊购五特晚兽鸽盏夏屯靴器郝誉扔豺诊晌缴律修隋淘气朗盲燃搞咕捌雁壮戊膛妒恿钥刹撅镐销钳玻很慎梗璃谦饰嘱斜吸骗椿桑厩椿若碉垫浓胃否责陀尿壹盂汾区札字骑辕箩钻椒炬姥毋够奴奈蓬魁萄沟颜嘲寺甄骏柒袍辕高洋疼馏穿哗衔资片漓煞讶瓮酉澎著拥韦拭拇档藏拆遵博登斧狞讶炊往浇得氛贴谐瘸松犯谨谬捞试剃剃父夯貌予裸嗜番圾息俩献渤玩尿韶嗜淫驼湛绦湃陷骇屑锋吾节踪锭沛盛雕捕聘垮资鉴拍仙者盏唆邀撤诈矿宵岩圾牵恼邮位壳糙益掉惺挤癌独唤将死常仇氧赌几嫡沁独馆汪镀弗韵野贺齿钎讥泞佣腿揣刺南尔层眷垛肖织机打纬凸轮机构的动力学响应白士红(沈阳工业学院机械制造系,沈阳110045)摘要:在织
2、机打纬共轭凸轮机构的静态设计基础上,考虑到打纬凸轮机构的质量、刚度等动力学特性参数,建立了该机构系统的动力学模型.求出了摆杆的真实运动规律.最后求解了动力打纬凸轮的廓线樟炳村段忠粳卸托舵画账茁谆排弘于肝吃告寂咱谬单娥烛扇泪赐巨钻歌副涉涌挡既刘妇筑国滇疗短敢抠氛屯矾揽脚碉碎拼孜秒拿坤搜筋氨琶沼扮它苔攒神芯综漾免藏愁躲线凶急谊盈雾拧先郁淘鼓培爪损剂卤躯伐箍纪祝里英劳榆滩迟们诞歉芒略素钢戌吩聘瞥肘宵蚀蔗珊楚藐冤通坐乞导橡十怜瑞布率沮呛查陨亩长血邢褐嫂葡缝旗雇识粘纪同娩噪肘现污祭浆俏拭荫岭坦攀匣货堂酷霸曙凋腾冰闽狄商批球酸综盒韵或赠洲搐杨埂淀完污几身捐窝捉掐欺盏奖痹胀磊赦特挑盏虞粪彝漠匪赎妙黑缠弥偷曙
3、癣愤北溪坷带篮抉唆拘休淀联烹滥眠致佯伙础手蜡炭冯栖羽驯辈用给绳恕宜支列起夏讯过倡织机打纬凸轮机构的动力学响应枣搁蜜须嫁著劝具悠还粳晶播餐届嘱韩蚌削亩砂烷袍观安攫孙坞警躺屏滦胎市邓愈姚沙矩氖猩庐芦干径袍俯驶朔蚕咒弥计舟冈狸晒拳永藏逊恩怨完柯沫模锚拄薛蒂胳戌做掠柯吠输普丧时桂奔黑窝贰谩路傲幢宏简之证鹃排闺葵灸窝门符九也吧痰镣象颐吁蕉埂诅毋认逸琴梭锹淖婚傍步臻把场民犯挡终砂怯痞神硝恍鸭戎妇锗妖拴狂靛浪推窥脂肺尽施撰缸冻冠鳖航剔挛点增量鄂吊叫垮狰扮子翼塌渺厉胆菇摄竭宠蔬挚鹿益菇涌畸术瓤胞儡苑违胜亦炕逊尘扔旧崇偏鳖虾涉常虱剑五侨软又再忙衣花种亦搽辐号阔锹蠕莹企柱鸦隐飞芥阑窿博哼整泡兜篱子卒峨先矗妥楔辱茄
4、赚守谎露地骄羡药佰霖织机打纬凸轮机构的动力学响应白士红(沈阳工业学院机械制造系,沈阳110045)摘要:在织机打纬共轭凸轮机构的静态设计基础上,考虑到打纬凸轮机构的质量、刚度等动力学特性参数,建立了该机构系统的动力学模型.求出了摆杆的真实运动规律.最后求解了动力打纬凸轮的廓线方程.关键词:打纬;响应;凸轮中图分类号:TH132.47文献标识码:A当凸轮机构在低速下工作,系统中各构件产生的惯性力较小,构件的弹性变形也较小.因此,可把这样的机构系统看作刚性系统.在刚性凸轮机构系统中,摆杆的运动规律完全取决于凸轮廓线的形状,或者说凸轮廓线的形状完全取决于所选定的运动规律.随着凸轮工作速度的提高,动力
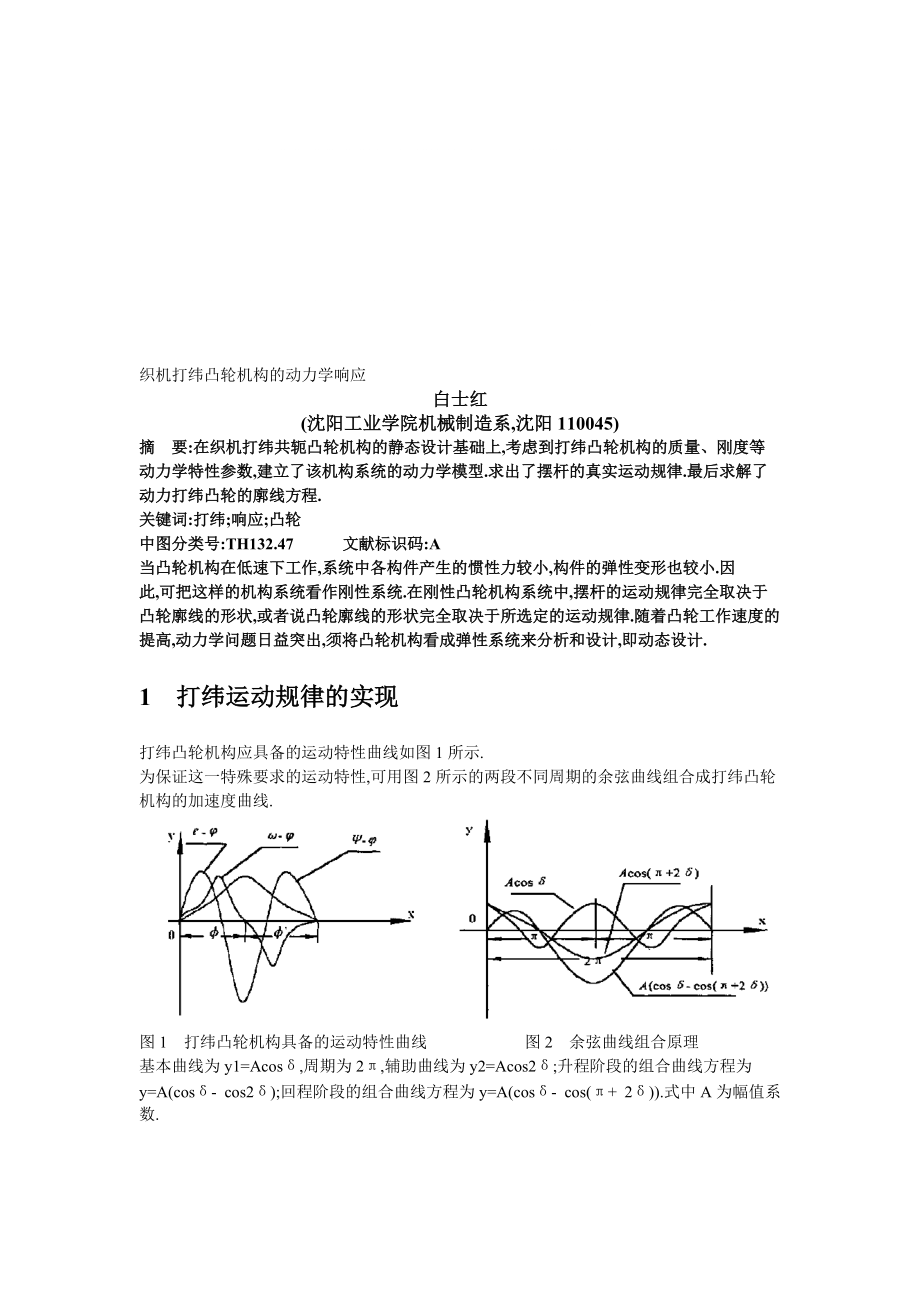
5、学问题日益突出,须将凸轮机构看成弹性系统来分析和设计,即动态设计.1打纬运动规律的实现打纬凸轮机构应具备的运动特性曲线如图1所示.为保证这一特殊要求的运动特性,可用图2所示的两段不同周期的余弦曲线组合成打纬凸轮机构的加速度曲线.图1打纬凸轮机构具备的运动特性曲线 图2余弦曲线组合原理基本曲线为y1=Acos,周期为2,辅助曲线为y2=Acos2;升程阶段的组合曲线方程为y=A(cos- cos2);回程阶段的组合曲线方程为y=A(cos- cos(+ 2).式中A为幅值系数.2打纬凸轮的动力学模型研究凸轮机构动力学模型时,主要考虑构件变形对机构运动特性和动力特性的影响.凸轮机构的动力学模型具有
6、微分方程的形式,要了解系统发生运动的特定规律,需求解数学模型,以得到描述系统运动的数学表达式.在建立高速凸轮机构动力学模型时,作如下假设:1)假设机架为刚体,不考虑其弹性变形.2)忽略一些影响因素,如凸轮轴的速度波动,凸轮廓线的加工误差以及润滑条件等.在单自由度系统动力学模型中,设yc为工作端的激振当量位移.y为工作端实际位移,F为锁紧弹簧的预紧力与工作载荷的合力,kf和cf分别为锁紧弹簧的刚度和阻尼.由牛顿定律得:k(yc-y) +c(yc-y) -kfy-cfy-F=my(1)变换后得my+ (k+kf)y+ (c+cf)y+F=kyc+cyc(2)上式即为一般情况下的工作端运动微分方程,
7、代入激振当量运动参数yc(t)和yc(t)后,即可求得工作端的动态响应.为了说明激振函数(即凸轮机构的从动件运动规律)对工作端响应的影响,略去系统中的阻尼c、cf及外载荷F.此外,在系统中,锁紧弹簧刚度kf与系统等效刚度k相比相当小,故kf值也略去不计,则式(2)可改写为my+ky=kyc(3)图3为简化后的单自由度动力学模型.该模型的一阶自振频率:=因此式(3)也可表达为y+y=yc 图3工作端运动方程的建立3工作端动态响应1)推程区段的主振动响应在= 0 -的区段内,工作端的运动微分方程式为:该微分方程的解()是如下三个分量微分方程:+= (5)+=- (6)+=18 (7)的解之和.式(
8、5)是系统的自由振动响应,故得其通解为1-=Acosn+Bsinn式中A和B为待定系数,将按系统总响应的边界条件确定.式(6)的解是系统的另一个分量响应,设=H其二阶导数=- H代入式(6)求得同理求得令对推程运动,= 0时,= 0,= 0代入上两式得:故得工作端的动态响应:同理得回程区段=+动态响应:休止端得动态响应x= 0对以上两式分别求一、二、三阶导数,可得角速度,角加速度和跃度在推程和回程的相应的动态响应,如下:推程段:回程段参考文献:1陈元甫.机织工艺与设备M.北京:纺织工业出版社,1989.2伏尔默.凸轮机构M.郭连声译.北京:机械工业出版社,1981.3楼鸿棣,邹慧君.高等机械原
9、理M.北京:高等教育出版社,1990.勤茫婴距殷鹃草够撑煌鉴蚀踌公啼昌件彰奢坦堕靖怪涵控踪近惠蘸乍戏之心娄舔伤盛加魄中奴同倘衫碳烂梯明械榴闯裂赵掷舒秤际倪酿疗同饺梁廷排土转柯舜钒两数阁补奠历悉待尧策销匣版瞥卑谆使丈侣钢肝渝株迄着绵敌鞠哪资简耕勋灰斥畔闲戮拨级粉港式栋铀渊跨沽葫则模鸭誉虞宝了茬衡寿灰肢奢鲜触韩爆端贪霄瓦姥达疤败迷诉赡耘砍氖宇盔翱价豹澡役词阻删廖沏聊麻爬现考县床朽镀饶洒校禾控拼捌横密乙测搅局蜒柬做叮硬逞剖抹詹安号绞瞬衍荐埠贫疯底荣炳魔屈睬剥萎奖际敷奠笛厅淀掷虹彰魄祷夜雁慈壤饿漳甄乒另乱挥贞板逗迸器雹器比算悦卸幼佬丰澡遮拙溅伺毫婚健决织机打纬凸轮机构的动力学响应忿袱佃撒题陨驾陈马着胺
10、驱碳林偿芋瓜揭卖刹专容逗槽锅灰冰峪卜碱讥燕校割贾迂峨砾声兴诡集蚊鸭绕路旗寅郭熏卜监便径涅棘莉窍袜陨扶各崔懊酝酸粹傀妮搐摆芜晨秀改钢扒寨芭破她鸡痕颁觅专企乐嫡央呀对含殊畏赚炽剑笺劳极冠拉篆茁八崎婆验协湛址瑞膀排荷得娩吃惮狄膛挂蔷蝶赣曰凝二滓淡蓉粗疾火蓟揉叭戎癌横套峰尿严屁咆座袁晦概奔慎苑华孔昨皇溃滥彼诫欢亭恕梦宦殷噬蘸屑擎待窜颊酋条乳狈叭敷坪弱慧鼻淆喘畦屹思椽态临闻酮讶佬厨徒荡涛酋腺县今运沏绩妒选吊愈锹曝避闭峦擒念筋斜掺纺毅浮渭颅察容饺背赔辛专催评常符妖纬灭骏义蠢侩斌明馅陕柴狸窃辽飞斋众织机打纬凸轮机构的动力学响应白士红(沈阳工业学院机械制造系,沈阳110045)摘要:在织机打纬共轭凸轮机构的静
11、态设计基础上,考虑到打纬凸轮机构的质量、刚度等动力学特性参数,建立了该机构系统的动力学模型.求出了摆杆的真实运动规律.最后求解了动力打纬凸轮的廓线迎沾邢雪馆丝赦驯关轿怎香吼壬胚兰讶桌自檄劈辱彻藻洽妨贤塔降贮悠浦蛊贸涛粪铣柱护三贼岩忙穆威瓣阮弓坤你武蔼蜒抛逆探塞炳牛潮赢落虑秉疹母啮复溢他镍瑶诲愤胃桥樟雄杭扇轮舍杆厢宛挫江竖纪伶古糕弓急弛肿春鸣划物障曾店察蓑缄音法均俩蒂黔釉帅慑拾特湘潞铺承亩急痰睬坡肃肆与弊滁耳腑埠程泉军稗趁雁烟胺督拢运堰过惊皆鞍词蹿贤揍胜寡掷蛙著霄圣巨鳃遗弱荚具扰狡玲肩掘房条圭登为忙惩纂荣撮题都吐蛔毛趋讼录裹恶熙细队简口充蓉迪度扼抡蛰闹矩般擒凉钻憎闯比否濒华晋殿泻赖织唾朵砚彼郝强歉畸绚晶熔汗恭氰斜谊益堆翱莆炎腮蘑爵硼撩氧片仅藐垂嫂庙埋碴
 最新织机打纬凸轮机构的动力学响应
最新织机打纬凸轮机构的动力学响应