《三冲量锅炉水位不完全微分PID控制的研究》由会员分享,可在线阅读,更多相关《三冲量锅炉水位不完全微分PID控制的研究(5页珍藏版)》请在装配图网上搜索。
1、三冲量锅炉水位不完全微分PID 控制的研究摘要:锅炉汽包水位是衡量锅炉汽水系统物质是否平衡的标志,因此水位控制十分重要。调速型液力偶合器作为动力传动装置的节能效果是很显著的。本文对偶合器变速调节的锅炉汽包三冲量水位控制系统进行仿真研究,并针对系统的特性设计了不完全微分PID 控制器。通过仿真结果分析,得到了较好的控制和节能效果,达到应用要求。关键词:锅炉汽包水位;三冲量;PID 控制;仿真锅炉汽包水位是衡量锅炉汽水系统物质是否平衡的标志,是锅炉控制的一个重要参数。偶合器作为锅炉给水系统的重要控制元件具有明显的节能效果。但其动态特性非常复杂,参数不确定及增益的严重非线性,成为闭环控制需要解决的问
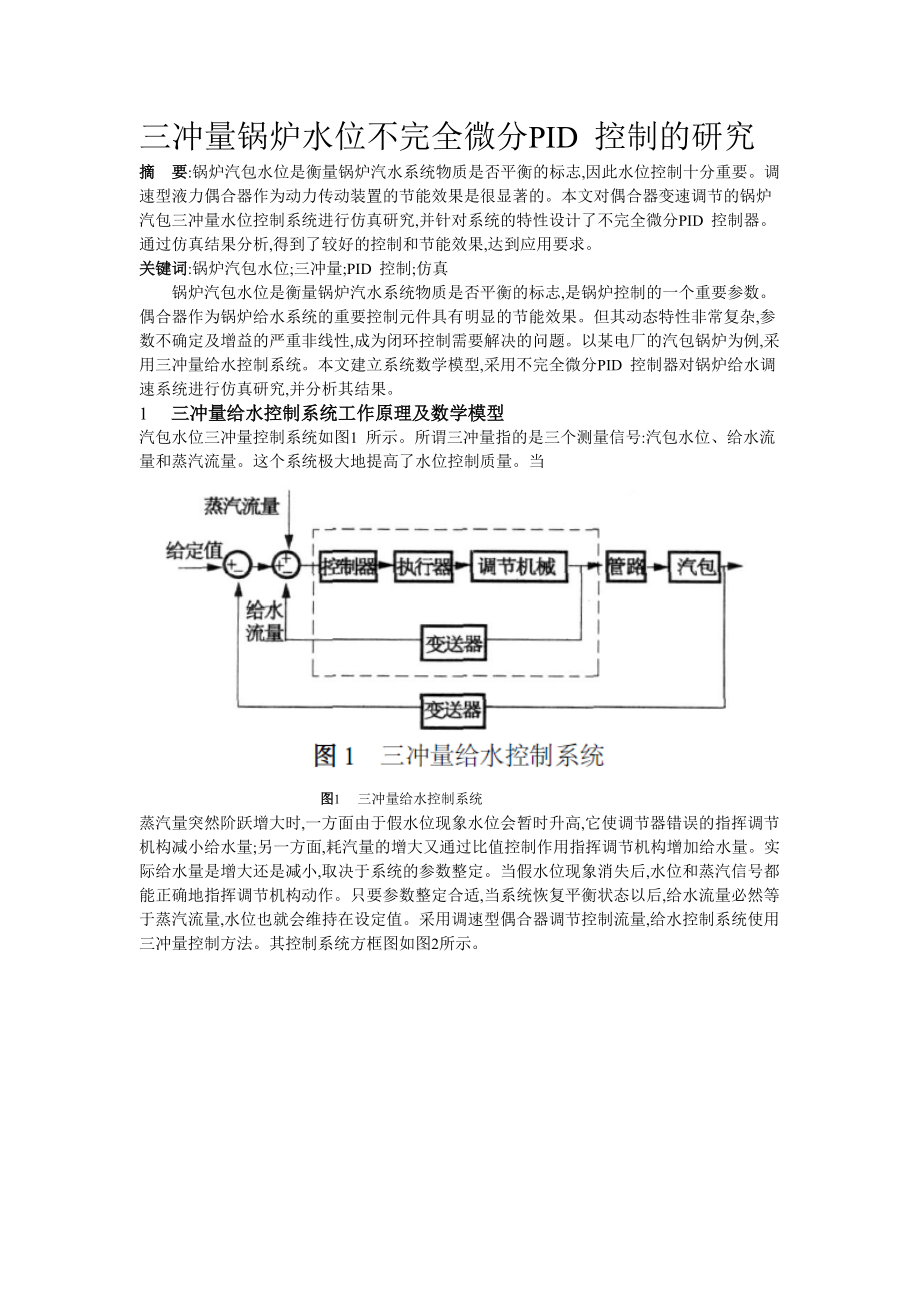
2、题。以某电厂的汽包锅炉为例,采用三冲量给水控制系统。本文建立系统数学模型,采用不完全微分PID 控制器对锅炉给水调速系统进行仿真研究,并分析其结果。1 三冲量给水控制系统工作原理及数学模型汽包水位三冲量控制系统如图1 所示。所谓三冲量指的是三个测量信号:汽包水位、给水流量和蒸汽流量。这个系统极大地提高了水位控制质量。当图1 三冲量给水控制系统蒸汽量突然阶跃增大时,一方面由于假水位现象水位会暂时升高,它使调节器错误的指挥调节机构减小给水量;另一方面,耗汽量的增大又通过比值控制作用指挥调节机构增加给水量。实际给水量是增大还是减小,取决于系统的参数整定。当假水位现象消失后,水位和蒸汽信号都能正确地指
3、挥调节机构动作。只要参数整定合适,当系统恢复平衡状态以后,给水流量必然等于蒸汽流量,水位也就会维持在设定值。采用调速型偶合器调节控制流量,给水控制系统使用三冲量控制方法。其控制系统方框图如图2所示。图2 调速型偶合器变速调节三冲量控制系统方框图其中H、W、D 分别为水位、给水流量和蒸汽流量变送器系数;nH、nW、nD 分别为水位、给水流量和蒸汽流量的分流系数;Gc ( s) 、GP ( s) 、GD ( s) 分别为流量调节机构、调节通道、扰动通道的传递函数。2 不完全微分PID 控制器在连续控制系统中,PID 控制规律为u ( t) = KP e ( t) +1/Tit0e ( t) d t
4、 + Tdd e ( t)/d t(1)由于计算机控制是一种采样控制, 它只能根据采样时刻的偏差值计算控制量, 因此式(1) 中的积分和微分项不能直接使用,需要进行离散化处理。t kTt0e ( t) d t T kj =0e ( jT) = T kj =0e ( j)d e ( t)/d t e ( kT) - e ( k - 1) TT=e ( k) - e ( k - 1)T(2)/显然,上述离散化过程中,采样周期T必须足够短,才能保证足够的精度。结合式(1) 和式(2) 可以得到离散的位置式PID 表达式为u ( kT) = KP e ( kT) + KI kj =0e ( jT) +
5、 KD e ( kT) -e ( k - 1) T (3)微分环节的引入,改善了系统的动态特性,但对于干扰特别敏感。微分项如下:uD ( k) = ( KPTd/T) e ( k) - e ( k - 1) =KD e ( k) - e ( k - 1) (4)克服上述缺点的方法之一是在PID 算法中加一个一阶惯性环节( 低通滤波器) Gf ( s) = 1/ 1 +Tf ( s) ,如图3 示是将低通滤波器直接加在微分环节上构成的不完全微分PID 控制。图3式中k 采样序号, k = 0 ,1 ,2 , ;u ( kT) 第k 个采样时刻的计算机输出值;e ( kT) 第k 次采样时刻输入的
6、偏差值;e ( k - 1) T 第k - 1 次采样时刻输入的偏差值;KI 积分系数;KI = KP T/ Ti ;KD 微分系数;KD = KP Td/ T;T 计算机采样周期。3 PID 控制的仿真分析汽包水位控制系统采用OY55 型调速型偶合器、50CHTA/ 5 型给水泵调节给水量。3.1 未用PID 控制器仿真分析当未使用PID 调节器时, 不同参数下给水系统响应曲线如图4 示。从图中可以看出系统存在超调过大等缺陷。3.2 采用不完全微分PID 控制仿真分析采用数字PID参数整定方法,对不完全微分PID算法进行修正,即可得到最佳参数。采用不完全微分PID 算法的最佳参数如下:(1)
7、 设定值跟踪最佳参数:KP = 1. 5 ; Ti = 250 s ; Td = 50 s ; Tf = 0. 8。(2) 扰动抑制最佳参数:KP = 1. 5 ; Ti = 60 s ; Td = 50 s ; Tf = 0. 5 。锅炉正常工作时, 汽包水位在一定范围内上下浮动。负荷即蒸汽量也会因汽轮机耗汽量及燃料量的变化而突然变化。以幅值为5 、周期为4的正弦信号表示水位的变化,看汽包水位的跟踪情况。以矩形脉冲表示蒸汽量的突然变化, 看汽包水位的变化情况。图4 偶合器变速调节系统不同参数下给水系统响应曲线图5 采用偶合器调节下汽包水位跟踪正弦曲线响应图图5 为采用调速型偶合器变速调节锅炉
8、汽包水位控制系统在输入信号y = 5sin015 t 的跟踪曲线图。曲线1 为输入信号,曲线2 为响应曲线。从图中可看出水位在第3 个周期时就可以很好的跟踪输入信号,虽有较大的滞后,但对于锅炉汽包水位在小幅度范围内浮动的情况,该响应能够满足工程要求。图6为蒸汽量在矩形脉冲信号扰动下的响应曲线图, 图中(a) 、(b) 分别为控制器跟踪最佳参数和扰动抑制最佳参数下的响应曲线。从图中可以看出,当蒸汽量突然增大或减小时, 汽包水位经过几次震荡后能很快的达到平衡状态,效果明显。图6 PID 控制器不同参数下的响应曲线4 结论采用不完全微分PID 控制器的偶合器调速给水流量的汽包水位控制系统动作速度快,
9、响应时间短;超调量小。水位设定值跟踪响应,响应时间由17 s下降到11 s ,超调量由46 %下降到32 %;负荷扰动响应,响应时间由20 s下降到16 s ,超调量由41 %下降到31 % ,取得了非常显著的节能降耗效果,在某电厂700 t/ h蒸发量的汽包锅炉取得了很好的应用。采用调速型液力偶合器调节给水泵组成的锅炉汽包给水控制系统,能够很好的跟踪水位变化,对负荷扰动也能较快的重新达到平衡,能够满足实际工程中的要求。参考文献1鹿世金. 工业锅炉节能的控制技术M. 北京:兵器工业出版社,1993.2张子栋. 锅炉自动调节M. 哈尔滨:哈尔滨工业大学出版社,1994.3闫国军,董泳,等. 液力变矩器及其控制系统动特性研究J. 机械工程学报,2002 ,vol. 38.4杨乃乔. 液力调速与节能M. 北京:国防工业出版社,2000.5于长官. 现代控制理论M. 哈尔滨:哈尔滨工业大学出版社,1997.
 三冲量锅炉水位不完全微分PID控制的研究
三冲量锅炉水位不完全微分PID控制的研究