 理论力学课第一次习题课讲义-北航
理论力学课第一次习题课讲义-北航

《理论力学课第一次习题课讲义-北航》由会员分享,可在线阅读,更多相关《理论力学课第一次习题课讲义-北航(12页珍藏版)》请在装配图网上搜索。
1、真诚为您提供优质参考资料,若有不当之处,请指正。第一次习题课讲义第一次习题课分为两部分内容,第一部分是两个作业题,意图通过它们讲述作业中所发现和需要解决的问题,第二部分是六个习题,意图通过它们介绍解题的思路、方法以及解题步骤。而整个习题课围绕“关联”的概念,讲述已知运动信息与待求运动信息间的关联,并有次形成解题的契机,步步为营,直至得到最终结果。下面便是本次习题课的主要内容。不管是在理论力学还是数学,抑或是物理等其它学科中,碰到一个问题,第一步是分析问题,分析问题性质,找出待求量与已知信息间的关联,然后根据不同的问题性质,用相应的方法予以解决。在而实际上任何问题的分析方法也都大同小异,重要的在
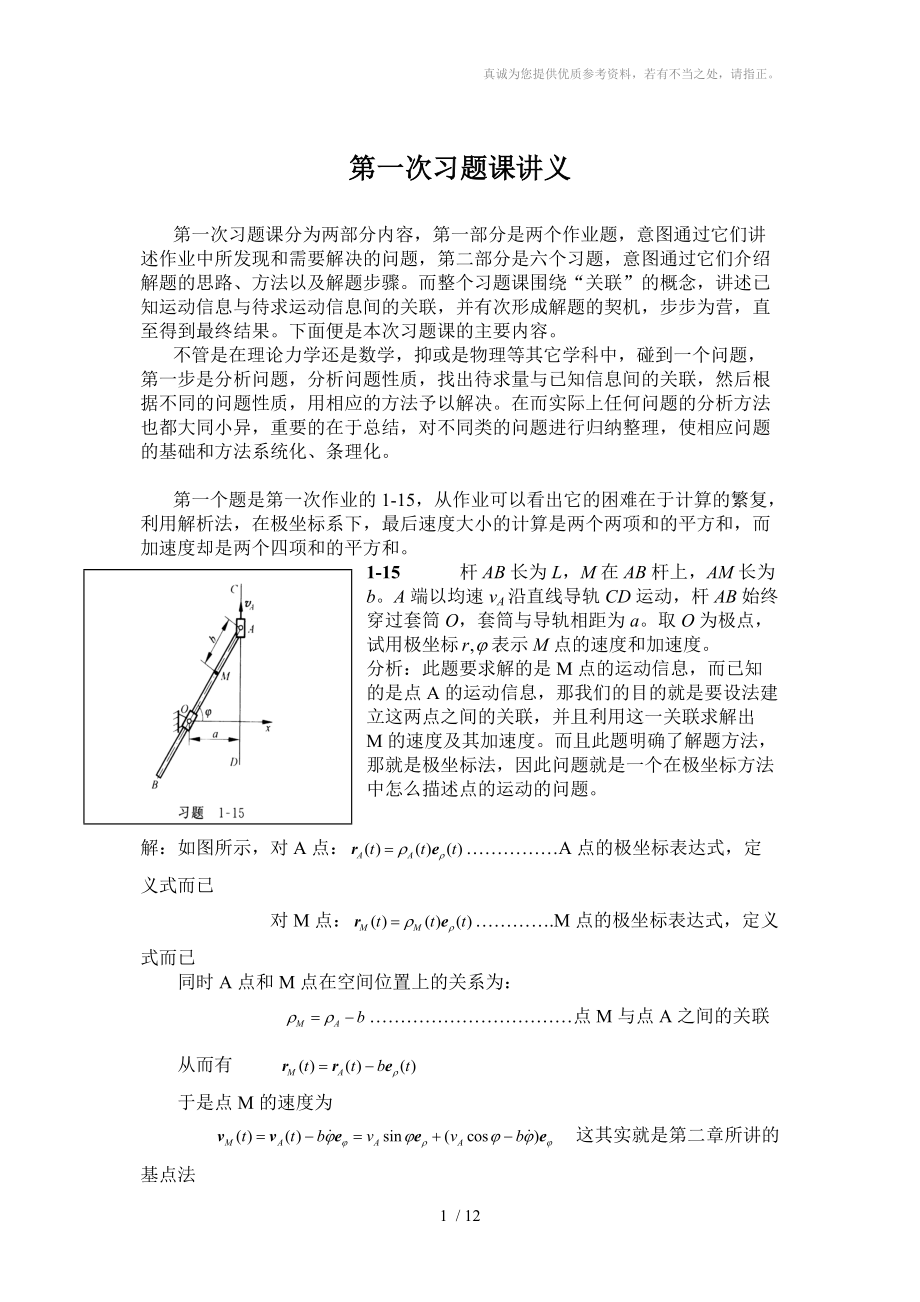
2、于总结,对不同类的问题进行归纳整理,使相应问题的基础和方法系统化、条理化。第一个题是第一次作业的1-15,从作业可以看出它的困难在于计算的繁复,利用解析法,在极坐标系下,最后速度大小的计算是两个两项和的平方和,而加速度却是两个四项和的平方和。1-15 杆AB长为L,M在AB杆上,AM长为b。A端以均速vA沿直线导轨CD运动,杆AB始终穿过套筒O,套筒与导轨相距为a。取O为极点,试用极坐标表示M点的速度和加速度。分析:此题要求解的是M点的运动信息,而已知的是点A的运动信息,那我们的目的就是要设法建立这两点之间的关联,并且利用这一关联求解出M的速度及其加速度。而且此题明确了解题方法,那就是极坐标法
3、,因此问题就是一个在极坐标方法中怎么描述点的运动的问题。 解:如图所示,对A点:A点的极坐标表达式,定义式而已 对M点:.M点的极坐标表达式,定义式而已同时A点和M点在空间位置上的关系为:点M与点A之间的关联从而有 于是点M的速度为 这其实就是第二章所讲的基点法于是点M的加速度为 .大小只是两项的平方和再求由几何关系可知: 再对求一次导: 代入经运算可得:第二个题是第二次作业中的补充题2,重点在于分析定点运动中瞬时转动轴的确定及其角加速度的计算。DB补充作业题2.半径为10cm的圆盘EDF用轴承装在曲杆BCD上,曲杆可绕铅垂轴AB转动,如图所示。已知,,曲杆绕AB轴转动的角速度= 10 rad
4、/s,圆盘与固定水平面接触点E处无滑动。试求:(1). 圆盘EDF的角速度及角加速度;(2). 圆盘边缘上点F的速度及加速.分析:要求解的是圆盘EDF的运动信息,实质上这是一个定点运动问题,因此,我们第一步必须判断出定点的所在,继而得到它的瞬时转动轴,也就是它角速度所在的方向。而我们已知的是曲杆BCD的运动,那么我们必须试图建立已知运动与未知运动信息之间的关联,同时参与两种运动的点就是这个问题中关联点,也就是点D。问题:定点的确定,是DC延长线与Z轴的交点,为什么不是点B?点B是否是EDF上的点呢?回答:这时我们考虑刚体的性质,刚体隐含的是其上任意两点的距离在运动中保持不变,假如点B是刚体ED
5、F上的点,我们考察B、E的距离,在此时BE如图示,那么假设E运动到F点的位置,则BEBFBE,因此,点B不是刚体EDF上的点,也不是其延拓部分上的点。解:实质上圆盘EDF在做定点运动,定点是DC延长线与Z轴的交点O,此外 ,所以EDF的瞬时转动轴就是OE连线。1) 求角速度和角加速度:假设曲杆BCD向里旋转,即同时由关联点D有问题:定点运动中,角加速度怎么计算?回答:角加速度是角速度矢量端点的运动速度,此时将角速度矢量虚拟成一刚体,考察它的运动,本题中,角速度矢量刚体自身在做定轴转动,所以先求角速度矢量的角速度。求角加速度:是角速度矢量端点的运动速度,将角速度矢量虚拟成一刚体,本题中,角速度矢
6、量刚体自身在做定轴转动:刚体上任意一点的运动信息由定点运动公式可得:2)求F的速度及加速度第二部分是六个习题,这六个习题中每个题目都能代表一类问题,但最重要的是我们在这里引入的“关联”的概念,大家在下面也会进一步看到,那些既参与已知运动又属于未知运动体的点或者刚体,就成为“关联点”或者“关联体”,它们成为整个题目分析的中心和研究对象。建立未知运动和已知运动之间的关系是整个解题过程的关键,也是解题的出发点和契机所在。1 杆AC在导轨中以匀速v平动,通过铰链A带动杆AB沿导套O运动,导套O与杆AC距离为l。求图示瞬时杆AB的角速度和角加速度。 CABOB60lvlBAwOCC*YX 分析:首先分析
7、一下问题的性质,以此确定问题的解法。要求解的运动是杆AB的运动,所以这是一个刚体的一般平面运动问题,因此,平面运动的解法均可使用,我们不妨把基点法、瞬心法和速度投影定理归为一类解法,因为,瞬心是个特殊的基点,而速度投影定理则可视为基点法的一个推论。此外,这个问题在结构上比较简单,而且几何关系也比较清晰,因此,可以使用解析法进行解题。而如果我们正好站在导套O上看点A,我们又会发现A点的相对导套的运动也很简单,是沿直线的运动,因此本题还可以运用点的复合运动去求解。我们为什么要看点A而不是其它点呢?是因为我们已知的是杆AC的运动,而要求解的是AB的运动,同时参与这两个运动的点只有A,它就是前面所说的
8、关联点。所以点A是中心。法一:瞬心法解:i.研究对象AB,第一步确定其瞬心C*,如图:ii确定几何尺寸:iii计算角速度和角加速度: 法二:解析法(最基本但有时比较繁琐而本题比较简便的方法)解:研究对象A,A受到杆AB的约束,所以,它的位置与转角关联,以O为坐标原点,水平方向为X皱,竖直方向为Y轴建立直角坐标系,如图示。因A的y坐标不发生变化,所以其x坐标为 法三:复合运动理论(相对运动和牵连运动比较简单)解:1).选择动点、建立动系:动点:点A;动系:固结在导套O上 2).分析三种运动:相对运动:沿直线AO的直线运动牵连运动:绕点O的定轴转动绝对运动:沿直线AC的直线运动 3).计算:速度:
9、vevvr 加速度: aenacaraet 各加速度方向如图示 大小分析: 往AO垂直连线投影得注:点的复合运动理论或刚体的复合运动理论,都只是一种用以分析和解决问题的方法,不是你非得这样用,也并非只有它才能解决问题,而是因为使用它能使得问题得以简化,也就是使一个绝对运动较复杂的问题转化为一个相对运动和牵连运动都易解决的问题。理论上动点可任意选择,但一经选定则不可再变化,因此对于一些变化的接触点不宜选作动点,而且实际中有一个准则,那就是最简原则,怎样的动点,怎样的动系,能使得问题最便于解决,这就是选择方案。一般而言,我们要保证相对运动比较简便。2.滑块B可沿杆OA滑动。杆BE与BD分别与滑块B
10、铰接,BD杆可沿水平导轨运动。滑块E以匀速v沿铅直导轨向上运动,杆BE长为。求图示瞬时杆OA的角速度与角加速度。 ElDBAlwOA45OvOABDEll分析:要求解的是杆AO的运动,它的运动是定轴转动,而已知的是滑块E的运动,因此,我们可以看到和这两个运动都相关的构件是BE,因此关联点是点B,且易知BE杆在做平面运动,因此一方面可以用平面运动方法求解点B的运动信息。我们再看点B与OA杆,它们之间是存在相对运动的,因此,我们必须用到点的复合运动理论将点B的运动与OA的运动XXX在一起。要求解OA的运动,必须先知道点B的运动,要知道点B的运动,也就要先知道杆BE的运动。解:1)先用平面运动方法求
11、解点B的速度和加速度 易知点O是BE杆的瞬心,因此有EB 由基点法计算点B的加速度: 方向如图示:其中: 又 2)用复合运动理论求解 动点:点B 动系:固结在杆OA上 绝对运动:沿BD的直线运动 相对运动:沿OA的直线运动aBaenaraet 牵连运动:定轴转动 其中: 注:这个问题是平面运动方法与点的复合运动方法的结合,其中关联点的信息可以通过平面运动方法单独求出,下面的例题中关联点的信息必须通过两者耦合求解。3. AB长为l,滑块A可沿摇杆OC的长槽滑动。摇杆OC以匀角速度w绕O转动,滑块B以匀速v =wl 沿水平导轨滑动。求图示瞬时AB杆的角速度和角加速度。Bv30wCAO分析:要求解的
12、是杆AB的运动,它在做平面运动,已知点B的运动,一点运动信息不足以确定杆AB的运动,因此我们还必须知道刚体上另外一点,此处就是点A的运动信息。而点A被限制在滑槽内,同时OC的运动也已知,因此点A是问题所在,也是本题的关联点。同时进一步分析可以知道,若单独使用平面运动或者点的复合运动不足以得到A的速度和加速度,因此须两者耦合求解。解:复合运动中,以点A为动点,将动系固结在摇杆OC上。1).分析点A的速度: 点A随AB的运动,可以由基点法得到速度、加速度,同时由复合运动也有一种求解方法,表现在如下联等公式中:vevABvrvB 分析大小: 往ve方向投影有: 往vr方向投影有: 2).分析点A的加
13、速度:aracatABaneanAB 分析大小: 往ac方向投影:4.图示平面机构由四根杆依次铰接而成,已知AB = BC = 2r,CD = DE = r,AB杆与ED杆分别以匀角速度w1和w2绕A、E轴转动。求图示瞬时BC杆转动的角速度和C点的加速度大小。BCDEAA 分析:要求解的是杆BC的运动及点C的加速度,同样,本题中BC在做平面运动,而两个已知条件分别是杆AB与杆ED的运动,考察图上各点,点C能很方便的将两个已知运动和未知的BC杆的运动XXX在一起,因此,选C为关联点。此外,点C又隶属与杆DC,DC也在做平面运动,因此这个问题从实质上来说是两个平面运动问题的相互关联,同样,必须两者
14、耦合求解。解:两杆都在做平面运动,对点C的速度和加速度可分别在BC和DC上利用基点法,而它们求得的是同一点的运动信息,因此可以联等,过程如下:1).求VCBVBVCDVD 由速度关系 大小分析: 往vB方向投影有:往vD方向投影有:2).求aDanCDatCDanCBaBatCB 由加速度关系 大小分析: 往aB方向投影有:5.小环M套在直角杆OAB和半径为r 的半圆环上,当时,半圆环速度,加速度,直角杆角速度,角加速度为零,且。求:小环M的速度和加速度。分析:求解的对象是点M的运动,从题目分析可知,它既随半圆环C运动,同时又被直角杆带动,且相对这两个刚体又有各自的相对运动,因此,只有依据复合
15、运动理论把已知信息和待求信息结合,也就是说这个问题的实质是两个复合运动的相互关联,而关联点就是小环M。解:以M为动点,将动系1固结在半圆环C上,将动系2固结在直角杆OAB上,现分析两复合运动中的各种运动:动系1: 动系2: 相对运动:绕圆心C的圆周运动 沿AB的直线运动 牵连运动:随半圆环的平动 定轴转动 同样,将小环M分别置于动系1和动系2下,各自依据复合运动理论有速度和加速度求解方式,也可写成如下联等关系:1).求速度:Vr2Vr1Ve1Ve2大小分析:往ve2方向投影有 往竖直方向投影有ac2ae1ae2anr1atr1ar22).求加速度:大小分析:往ac2方向投影有6.在图示机构中,
16、套筒J可沿连杆BC滑动;沿铅垂方向运动的杆GF与套筒J用铰链F相连接。已知AB = 0.1m,BC = 0.3m,当BAC = 450时,曲柄AB的角速度w=10 rad/s,角加速度e=0。试求此时杆GF的加速度及连杆BC 的角加速度。分析:要求解的是杆GF的加速度和连杆BC的角加速度,已知的是杆AB的运动,而杆GF在做平动,因此其加速度等于其上任意一点的加速度,所以转为求滑套J的加速度;而杆BC在做平面一般运动,因此可以利用点B、C来求解,同时滑套J与BC存在相对运动,且必须先知道杆BC的运动才能得到点F的运动,因此问题分解为两个小问题:1).求杆BC的运动,即它的角速度,角加速度;2).
17、求滑套J的加速度,也就是杆GF的加速度。第一个小问题是平面运动问题,因此用平面运动方法求解,第二个问题是一个存在相对运动的问题,用点的复合运动方法求解,在第二问中关联点是滑套J,即点F。此题也可用解析法求解。解:1).求易知点P是杆BC的瞬心,所以有 求角加速度:(基点法)已点B为基点,考察点C的运动aBanCBatCB 2).求:(点的复合运动理论) 动点就选点F,动系固结在杆BC上 绝对运动是沿竖直方向的直线运动 相对运动是沿BC的直线运动 牵连运动是平面运动,所以牵连加速度用基点法求解得到 因为科氏加速度ak与相对速度相关,因此先求相对速度:anFBaBatFBaFarak 向方向投影有
18、 小结:本次习题课是运动学部分的习题课,内容涉及到平时的作业与我们甄选的六道习题,以上仅给出其相应的某种思路和解法,当然,还不乏其它的思路和解法,我们希望大家能够在作业中充分思考,一题多解,触类旁通。从上述内容可知,解决一个问题的大致思路如下:1).分析问题性质,即分析相应构件的运动学性质,找出已知运动与待求运动之间的XXX,确定所谓的关联点或构件。2).根据问题性质和构件的运动学性质,确定解题方法,并以关联点为研究对象,建立数学模型,也就是写出其对应的速度和加速度计算公式,有时是独立就可求解,有时则需联立才能求解。3).依据建立的数学关系式,分析其中各变量(速度、加速度)的方向,画出示意图,以助分析。4).分析示意图或公式中各变量(速度、加速度)的状况(已知、待求),选择适当的投影方向(避免未知量的联立求解),由此得到最终的待求结果。5).对结果进行必要的分析,包括方向、量纲的合理性等。 学习一门课,时常进行总结,使之条理化、系统化,是非常必需的,因为它有助于基础的牢固把握和方法的灵活运用。12 / 12
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
