《PLC“分拣机械手”的控制设计 课程设计说明书》由会员分享,可在线阅读,更多相关《PLC“分拣机械手”的控制设计 课程设计说明书(24页珍藏版)》请在装配图网上搜索。
1、车辆与动力工程学院课程设计说明书电气控制技术课程设计任务书班级: 姓名: 学号: 设计题目: “分拣机械手”的控制设计1 一、设计目的进一步巩固理论知识,培养所学理论知识在实际中的应用能力;掌握一般生产电气控制系统的设计方法;掌握一般生产电气控制系统的施工设计、安装与调试方法;培养查阅图书资料、工具书的能力;培养工程绘图、书写技术报告的能力。二、设计任务及要求掌握PLC工作原理、编程及调试方法及应用技术;根据控制要求,制定合理的设计方案;.正确选用PLC,确定输入、输出设备;PLC的I/O点分配,并绘制其连接图,以及其它外部硬件图;设计PLC控制程序;绘制有关图纸;编制设计说明书。三、控制要求
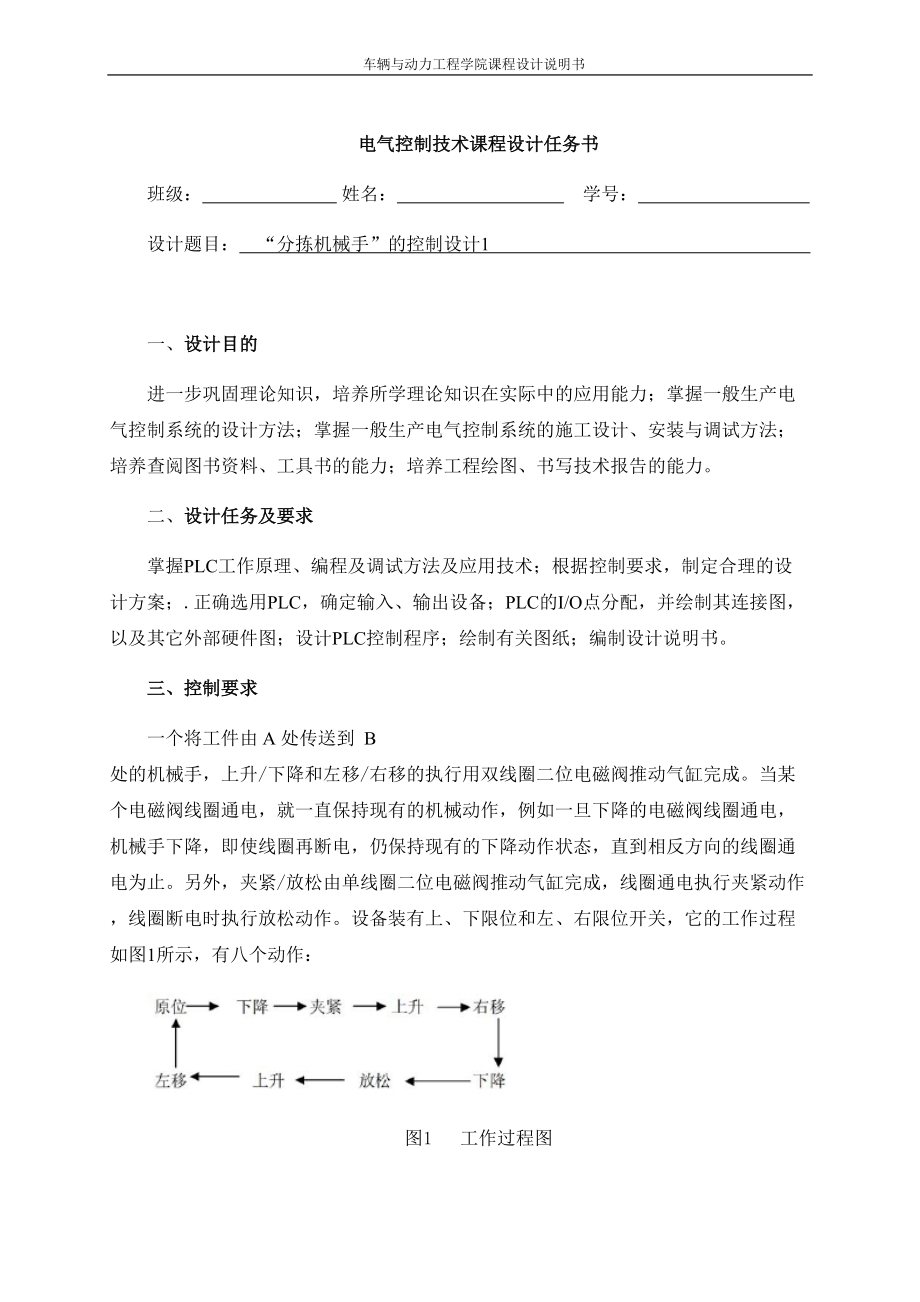
2、一个将工件由 A 处传送到 B 处的机械手,上升/下降和左移/右移的执行用双线圈二位电磁阀推动气缸完成。当某个电磁阀线圈通电,就一直保持现有的机械动作,例如一旦下降的电磁阀线圈通电,机械手下降,即使线圈再断电,仍保持现有的下降动作状态,直到相反方向的线圈通电为止。另外,夹紧/放松由单线圈二位电磁阀推动气缸完成,线圈通电执行夹紧动作,线圈断电时执行放松动作。设备装有上、下限位和左、右限位开关,它的工作过程如图1所示,有八个动作:图1 工作过程图四、设计时间安排查找相关资料(1天)、设计并绘制系统原理图(2天)、设计PLC控制程序(2天)、模拟调试(2天)、编写设计报告(2天)和答辩(1天)。五、
3、主要参考文献1.黄永红.电气控制与PLC应用技术, 北京: 机械工业出版社, 2011.2.王建华. 电气工程师手册, 北京: 机械工业出版社, 2006.3.吴晓君. 电气控制课程设计指导, 北京: 中国建材工业出版社, 2007.指导教师签字: 年 月 日分拣机械手的控制设计摘 要本文介绍的机械手是由PLC输出三路脉冲,分别驱动横轴、竖轴变频器,控制机械手横轴和竖轴的精确定位,微动开关将位置信号传给PLC主机;位置信号由接近开关反馈给PLC主机,通过交流电机的正反转来控制机械手手爪的张合,从而实现机械手精确运动的功能。本文设计的主要目地是将物体从A移动到B,实现物体的移动。可代替人工的危险
4、动作。再设计的过程中,设计模块主要分三个模块。1.回原点操作。2.手动操作。3.自动操作。三个独立的模块很容易设计,但当合成一个程序时,由于输出的相互影响,使得程序出现凌乱。如在手动操作中,在闭合加紧开关时,输出Q0.4不得电。是因为中的Q0.4没有得电。所以在设计过程中必须保证输出的结果相同。本课题拟开发的物料搬运机械手可在空间抓放物体,动作灵活多样,可代替人工在高温和危险的作业区进行作业,并可根据工件的变化及运动流程的要求随时更改相关参数。关键词:机械手 交流伺服电机 PLC目录分拣机械手的控制设计I摘 要I第一章绪论1第二章总体设计22.1分拣机械手的操作要求及功能22.1.1操作要求2
5、2.1.2操作功能22.2硬件接线图32.3输入和输出点分配表及I/O分配接线32.4软件电路设计及描述52.4.1机械手的操作系统程序52.4.2 回原位程序52.4.3手动单步操作程序72.4.4自动操作程序92.4.5急停和停止102.5机械臂传送系统梯形图112.6机械臂传送系统仿真图17第三章设计结论19参考文献19II第一章绪论在现代工业中,生产过程的机械化、自动化已成为突出的主题。随着工业现代化的进一步发展,自动化已经成为现代企业中的重要支柱,无人车间、无人生产流水线等等,已经随处可见。同时,现代生产中,存在着各种各样的生产环境,如高温、放射性、有毒气体、有害气体场合以及水下作业
6、等,这些恶劣的生产环境不利于人工进行操作。工业机械手是近代自动控制领域中出现的一项新的技术,是现代控制理论与工业生产自动化实践相结合的产物,并以成为现代机械制造生产系统中的一个重要组成部分。工业机械手是提高生产过程自动化、改善劳动条件、提高产品质量和生产效率的有效手段之一。尤其在高温、高压、粉尘、噪声以及带有放射性和污染的场合,应用得更为广泛。在我国,近几年来也有较快的发展,并取得一定的效果,受到机械工业和铁路工业部门的重视。本课题拟开发物料搬运机械手,采用plc,对机械手的上下、左右以及抓取运动进行控制。该装置机械部分有滚珠丝杠、滑轨、机械抓手等;电气方面由交流电机、变频器、操作台等部件组成
7、。我们利用可编程技术,结合相应的硬件装置,控制机械手完成各种动作。第二章总体设计2.1分拣机械手的操作要求及功能2.1.1操作要求分拣机械手的功能是将工件从A处移送到B处。控制要求为:1、分拣机械手的升降和左右移行分别由不同的双线圈二位电磁阀推动气缸来实现,当某个电磁阀线圈通电,就一直保持现有的机械动作,例如一旦下降的电磁阀线圈通电,机械手下降,即使线圈再断电,仍保持原来的状态,必须驱动反向的线圈才能反向运动;2、上升、下降的电磁阀线圈分别为YV2、YV1;右行、左行的电磁阀线圈为YV3、YV4;3、机械手的夹钳由单线圈电磁阀YV5来实现,线圈通电时夹紧工件,线圈断电时松开工件;4、机械手的夹
8、钳的松开、夹紧通过延时1S实现;5、机械手的下降、上升、右行、左行的限位由行程开关SQ1、SQ2、SQ3、SQ4来实现; 2.1.2操作功能机械手能实现手动、回原位、连续等工作方式。1、手动工作方式时,用各按钮的手动开关实现相应的动作;2、回原位工作方式时,按下“回原位”按钮,则机械手自动返回原位;3、连续工作方式时,机械手在原位,只要按下“连续工作”安钮,机械手就会连续循环工作,直到按下停止安钮;4、传送工件时,机械手必须升到最高点才能左右移动,在左右极限时才能上下移动,以防止机械手在较低位置和左右位置运行时碰到其他工件;5、出现紧急情况,按下紧急停车按钮时,机械手停止所有的操作2.2硬件接
9、线图通过Q0.0、Q0.1分别控制电动机1的正反转,实现下降和上升,Q0.2、Q0.3分别控制电动机2的正反转,实现左行和右行。图1 主电路图2.3输入和输出点分配表及外部接线图表1 输入输出点分配图名 称代号输入名 称代号输入名 称代号输出启动SB1I0.0下限位SQ1I1.0电磁阀上升YV2Q0.1停止SB2I0.1上限位SQ2I1.1电磁阀左行YV3Q0.2加紧SB3I0.2右限位SQ3I1.2电磁阀右行YV4Q0.3放松SB4I0.3左限位SQ4I1.3电磁阀夹紧YV5Q0.4上升QS1I0.4回原点QS3I1.4电磁阀下降YV1Q0.0下降QS2I0.5手动QS4I1.5左行QS3I
10、0.6自动QS5I2.0右行 QS4I0.7急停SB5I2.1图2 外部接线图2.4软件电路设计及描述2.4.1机械手的操作系统程序 操作系统包括回原点程序,手动单步操作程序和自动连续操作程序,如图所示。 其原理是:把旋钮置于回原点,I1.4接通,系统自动回原点。再把旋钮置于手动,则I1.5接通,其常闭触头打开,程序不跳转,在I1.4不闭合的情况下,执行手动程序。之后,由于I1.5常闭触点,当执行CJ指令时,跳转到0所指的自动位置。如果旋钮置于自动位置,(既I1.5常闭闭合、I1.6常开闭合),在I1.4不闭合的情况下,程序执行时跳过手动程序,直接执行自动程序。图3 总体流程图2.4.2 回原
11、位程序1、回原点程序一回原位程序如图所示。首先,在梯型图中只有加紧和放松有了在用SET和RET指令,其它的手臂动作均是得电操作,失电停止。所以在左行的时所以在没有其它操作指令时,上下行、左右行是停止的。所以在上行、左行的时侯不需要考虑是否上行和左行。其次,回原点操作就是让手臂回到最左端和最上端。所以无论手臂在哪个地方,必须先移动到最上端再移动到最左端。最后,在手臂移动的时候,手臂必须是放松状态。图5 回原点流程图2、回原点程序的改进。当手臂处于加紧并且不是在最低点停止时,执行回原点操作,会使手臂里加紧的物体掉落。所以,先让手臂回到最低点,再放松。图6 回原点的改进图2.4.3手动单步操作程序如
12、图5所示。在进行手动操作时,首先将旋钮旋转到手动位置。此时I1.5闭合,I1.5的常开触电断开,不再进行跳转操作,流程开始进行手动操作。具体过程已在图中标注。其中图中上升/下降,左移/右移都有联锁和限位保护。2.4.4自动操作程序自动操作状态转移见图所示。由于启动时手臂自动回原位。所以开始自动操作前,手臂已回到原点位置。当闭合I1.6时I1.5处于断开状态,所以执行跳转操作,跳转到LBL0位置,I1.6闭合开始执行自动操作。I1.6接通,状态转移到M0.5,驱动下降Q0.0,当到达下限位使行程开关I1.0接通,状态转移到M0.6,而Q0.0停止移动.M0.6驱动Q0.4置位,延时1秒,以使电磁
13、力达到最大夹紧力。当T37接通,状态转移到M0.7,驱动Q0.1上升,当上升到达最高位,I1.1接通,状态转移到M1.0。M1.0驱动Q0.3右移。移到最右位,M1.1接通,状态转移到Q0.0下降。下降到最低位,M1.2接通,电磁铁放松。为了使电磁力完全失掉,延时1秒。延时时间到,T38接通,状态转移到M1.3使Q0.1上升。上升到最高位,I1.1接通,状态转移到M1.4使Q0.2左移。左移到最左位,使M2.0接通,返回初始状态,再开始第二次循环动。图7 自动操作的流程图2.4.5急停和停止在负载和电源之间接一个交流接触器的常闭开关,用中间继电器M2.0控制。当按下急停按钮I2.1后,M2.0
14、得电,从而使Q0.5得电常闭开关断开,切断电源。停止安扭的功能是在运行过程中,按下停止按钮,手臂不会停止,当到达极限位置时再停止。即该步完成后再停止。如,当手臂在最左端时,I1.3左极限是闭合的,按下停止按钮,手臂不停止。当I1.1上极限闭合时,M1.5得电,M2.0闭合,Q0.5得电,断开电源,停止工作。2.5机械臂传送系统梯形图机械臂的整个梯形图,能够完成急停、停止、回原点、手动、自动等功能。2.6机械臂传送系统仿真图图8是按下回原点I1.4时,根据行程开关的相应动作,最终使手臂达到最左、最上的极限位置,使I1.1、I1.3闭合。图9是按下I1.6时,在初始位置时,I1.1、I1.3是闭合
15、的,所以,按下自动开关后,手臂开始进行下降等一系列的动作。图8 回原点的仿真图图9 自动操作的仿真图第三章设计结论可编程控制器课程设计是课程当中一个重要环节,通过了2周的课程设计使我对plc设计过程有进一步了解,对plc产品的有关的控制知识有了深刻的认识。因为理论知识学的不牢固,在设计遇到了不少问题,通过理论与实际的结合,进一步提高观察、分析和解决问题的实际工作能力,以便培养成为能够主动适应社会主义现代化建设需要的高素质的复合型人才。运用学习成果,把理论运用于实际,使理论得以提升,形成创新思想。通过此次设计过程,巩固了专业基础知识,培养了我综合应用可编程控制器设计课程及其他课程的理论知识和应用生产实际知识解决工程实际问题的能力,在设计的过程中还培养出了我们的团队精神,为今后的学习和工作过程打下基础。还要感谢四位老师的指导,感谢你们的耐心与关爱。参考文献可编程控制器原理与应用 主编:涂明武 北京航空航天出版社 北京,2008.8PLC应用技术 主编:冯新强 北京邮电大学出版社 北京,2009.4电气控制与PLC应用技术主编:黄永红机械工业出版社北京,2011电气控制课程设计指导 主编:吴晓君 中国建材工业出版社 北京,200719
 PLC“分拣机械手”的控制设计 课程设计说明书
PLC“分拣机械手”的控制设计 课程设计说明书