 机械原理课程设计自动送料冲床机构的设计
机械原理课程设计自动送料冲床机构的设计

《机械原理课程设计自动送料冲床机构的设计》由会员分享,可在线阅读,更多相关《机械原理课程设计自动送料冲床机构的设计(36页珍藏版)》请在装配图网上搜索。
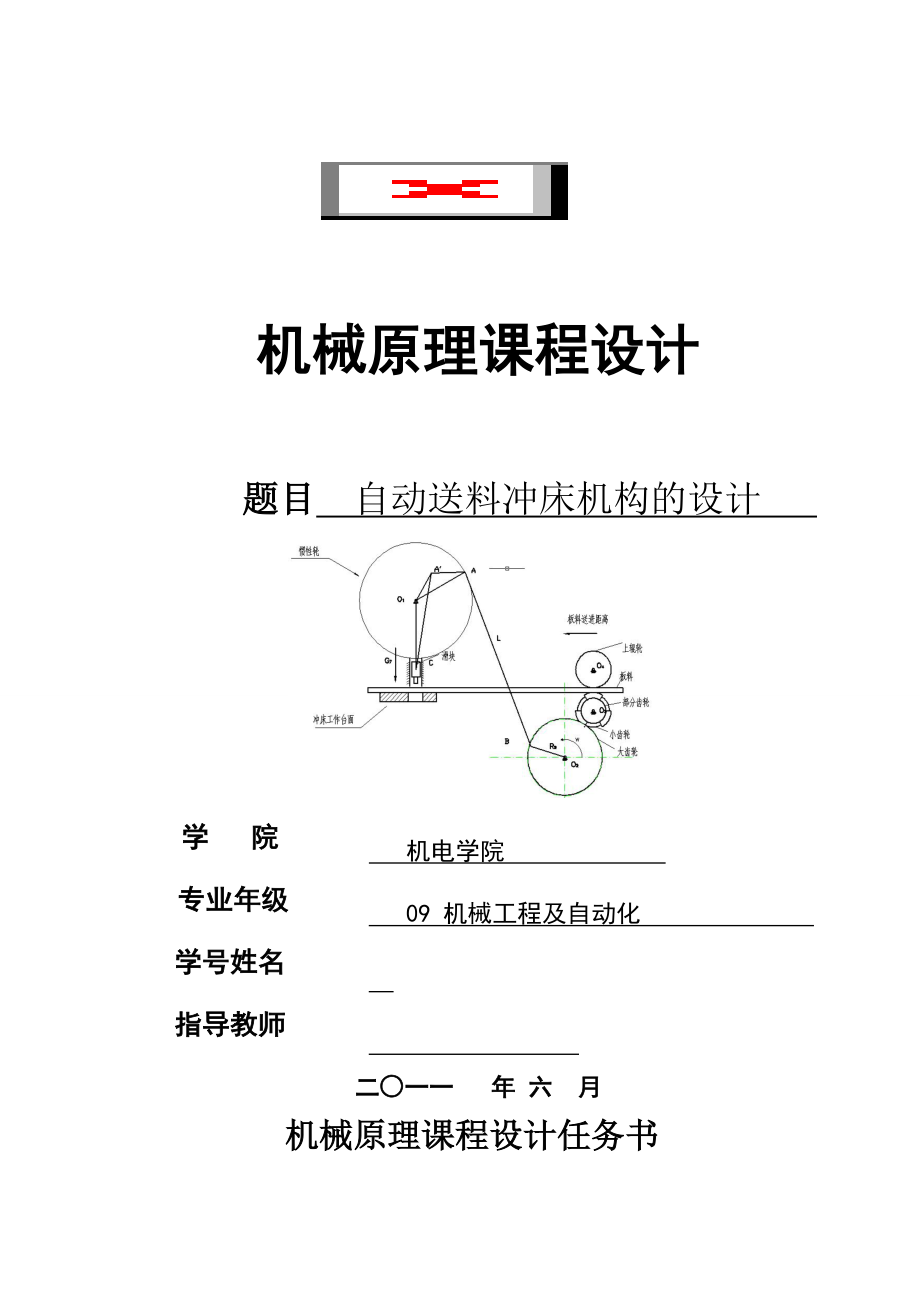
1、2011年6月 机械原理课程设计 指导老师:张洪双机械原理课程设计 题目 自动送料冲床机构的设计 学 院 机电学院 专业年级 09 机械工程及自动化 学号姓名 指导教师 二一一 年 六 月 机械原理课程设计任务书一、设计题目:自动送料冲床机构综合与传动系统设计二、工作原理及工艺动作过程:图1为某冲床机构运动方案示意图。该冲床用于在板料上冲制电动玩具中需要的薄齿轮。【电动机通过V带传动和齿轮传动(图中未画出)带动大齿轮转动,(另加解释)】通过连杆带动滑块上下往复运动,实现冲制工艺。四杆机构和齿轮机构实现自动送料。图1冲床机构运动方案示意图三、原始数据及设计要求:依据冲床工矿条件的限制,预先确定了
2、有关几何尺寸和力学参数,如表1所示。表1冲床机构设计数据设计要求:设计的冲床机构机构紧凑,机械效率高。四、设计方案提示: 连杆机构可采用双摇杆机构,也可采用曲柄摇杆机构5、 设计的主要任务图 2 冲头所受阻力曲线(l)绘制冲床机构的工作循环图,使送料运动与冲压运动重叠,以缩短冲床工作周期。(2)针对图1所示的冲床的执行机构(冲压机构和送料机构)方案,依据设计要求和已知参数,确定各构件的运动尺寸,绘制机构运动简图。(3)假设曲柄等速转动,画出滑块C的位移和速度的变化规律曲线。 (4)在冲床工作过程中,冲头所受的阻力变化曲线如图2所示,在不考虑各处摩擦、其他构件重力和惯性力的条件下,分析曲柄所需的
3、驱动力矩。(5)确定电动机的功率与转速。(6)取曲柄轴为等效构件,确定应加于曲柄轴上的飞轮转动惯量。(7)确定传动系统方案,设计传动系统中各零部件的结构尺寸。(8)绘制冲床传动系统的装配图与齿轮、轴等的零件图。(9)编写课程设计说明书。目 录1、 摘要2、 自动送料机构的总体设计1、 冲压机构方案初步设计2、 2、送料机构方案初步设计3、 3、整体机构运动方案的改进设计3、 各构件的运动尺寸的设计与计算4、 工作循环图与齿轮的计算5、 滑块C的运动变化规律及曲线6、 电动机的功率、转速和驱动力矩及飞轮转动惯量的 计算7、 设计的总结和心得8、 参考文献9、 附录一、摘要冲压是金属塑性成形加工的
4、基本方法之一,它主要用于加工板料零件,所以也称为板料成形。冲压既能够制造尺寸很小的仪表零件,又能够制造诸如汽车大梁、压力容器封头一类的大型零件;既能够制造一般尺寸公差等级和形状的零件,又能够制造精密(公差在微米级)和复杂形状的零件。冲压具有生产率高、加工成本低、材料利用率高、操作简单、便于实现机械化与自动化等一系列优点,在汽车、机械、家用电器、电机、仪表、航空航天、兵器等生产和发展具有十分重要的意义。制造冲压件用的传统金属材料,正逐步被各种复合材料或高分子材料替代。 在模具设计与制造中,开发并应用CAD/CAM系统,发展高、新制造技术和模具、装置等,以适应冲压产品的更新换代和各种生产批量的要求
5、。推广应用数控冲压等设备,进行机械化与自动化的流水线冲压生产。 某些传统的冲压加工方法将被液压成形、旋压成形、爆炸成形等新颖的技术所取代,产品的冲压加工趋于更合理、更经济冲模的核心部分是工作零件,即凸模和凹模。其形状和尺寸是由冲压工序的性质决定的。冲裁冲孔落料模的凸、凹模之间间隙很校,并做成锋利的刃口,以便形成强大的剪切力进行剪切,使坯件与板料分离在现代化的机加工过程中,消耗于送料的时间损失是组成零件单件加工时间的一部分,它属于辅助时间。要想提高生产率,减少生产中的辅助时间将是非常重要的一个环节。而要想减少辅助时间,就必须提高生产的自动化程度。自动送料机构就是为实现生产中送料工序自动化而设计的
6、一种专用机构。自动送料机构可将冲压料或冲压件经过定向机构,实现定向排列,然后顺序地送到机床或工作地点。这在自动化成批大量的生产中显然是实用的,不但可把操作人员从重复而繁重的劳动中解脱出来,而且对保证安全生产也是一种行之有效的方法。目前,国内拥有大量的冲压机床,如果能把它们改造成半自动或自动机床,将会充分发挥机床的潜在力量,这是一个具有重大意义的事情,而在机床上安装自动送料机构,这将大大提高冲压的生产效率,实现冲压的完全自动化。2、 自动送料机构的总体设计1、冲压机构方案初步设计本设计采用一个曲柄滑块机构进行冲压机构,其简易结构如图1-1 所示:图 1-1 电动机通过V带传动和齿轮传动(图中未画
7、出)带动转动,通过连杆带动滑块上下往复运动,实现冲制工艺。 2 、 送料机构方案初步设计自动送料装置按送进材料的形式分为送料装置与上件装置两类。本设计属于送料装置。常见送料机构形式有以下五种: 钩式送料机构; 凸轮钳式送料机构; 杠杆送料机构; 夹持送料机构; 辊轴送料机构。由于本设计所用的毛坯件厚度比较薄,不在前三种送料方案所适用的材料厚度范围内,第四种和第五种方案适用。将第四种与第五种方案进行比较,发现前者需要采用斜楔带动加料爪和滑板运动,在送料过程中振动会比较大,从而影响到送料精度;而后者是使用辊轴送料,过程更为平稳,因而,送料精度也较有保障。综合考虑各种因素以后,决定采用双辊送料机构,
8、如下图1-2:3、整体机构运动方案的改进设计考虑到实际的工作情况及技术要求,我们对机构作了进一步改进,其运动简图如1-3所示:如果采用惯性轮做原动件,齿轮必须作为“摇杆”,通过辊轮进行间歇送料传动,这样就增加了设计难度,而且不易控制于计算。采用如图所示的改进机构,仍以大齿轮为原动件,通过带动小齿轮及固连在小齿轮上的“带缺口辊轮”,仍能达到间歇送料冲压的目的,减小了设计难度。 三、各构件的运动尺寸计算由上图中的几何关系,可分别列出下列式子: (1)由余弦定理: (2) (3)由正弦定理: (4) (5) (6) (7)联立1、2、3、4、5、6、7得: 验证压力角: 四:工作循环图与齿轮的计算已
9、知:【:生产率 :送料距离 T: 大齿轮转动周期部分齿轮每一周传动k次(即板料冲压k次)则大齿轮对小齿轮的传动比为k】设小齿轮半径为r已知sn=150mm, n=180件/min,得=150/k又 sn=2r/2k解得:k=1.77K圆整为2,r=75,则部分齿轮的设计如下图:缺齿所占的角度=(180-1802sn/2r)/2=T=260/n=0.667五:滑快C的运动变化规律及曲线下图是用vb模拟仿真得出的数据和曲线:六:电动机的功率、转速、飞轮转动惯量和驱动力矩【以下公式中各字母的物理意义如下::生产率 :送料距离 T: 一个周期Pr:等效阻力功率 Pd:等效输入功率Fb:冲压板料最大阻力
10、:大齿轮的角速度 :小齿轮的角速度 :大齿轮的半径 :小齿轮的半径】电动机功率,飞轮转动惯量,驱动力矩,转速计算:根据滑块的位移曲线,近似认为下降过程所用时间(1/2)T,上升过程所用时间(1/2)T:已知: T=0.667 s,H=100 , Fr=2300N, Fb=530N带入数据参量:曲柄 ,摇杆 =360mm ,支座 =533mm(x=270mm,y=460mm) 得: =9.42 rad/s =18.84 rad/s 小齿轮速度=1413 mm/s忽略重力所做的功,冲头上下匀速运动:前(3/4)H: =886.8 W后(1/4)H: =1438.5 W上升过程: =886.8 W且
11、在一个周期内有 Pd=Pr=955.8 W根据上式可以画出如上图的能量图,各阴影面积f分别代表的为能量之差=15 J=-35 J=20 J根据上式可画出下图,计算最大盈亏功=15 J则飞轮转动惯量: =0.8628 则 =101.5 输入功率: 大齿轮转速:=90r/min根据文献【4】可选择查得:电机型号Y132M1-6,额定功率4KW,转速960r/min减速箱总传动比为:k=960/90=10.67七:设计总结与心得作为一名机械工程及其自动化专业大二的学生,第一次做课程设计,我觉得这次的课程设计是十分有意义。在已度过的将近两年的大学生活里我们大多数接触的是专业基础课。我们在课堂上掌握的仅
12、仅是专业基础课的理论面,如何去面对现实中的各种机械设计?如何把我们所学到的专业基础理论知识用到实践中去?我想做类似的大作业就为我们提供了良好的实践平台。 在本次课程设计的过程中,我感触最深的是查阅了很多次设计书和指导书。为了让自己的设计更加完善,更加符合工程标准,一次次翻阅机械设计书是十分必要的,同时也是必不可少的。我们做的是课程设计,而不是艺术家的设计。艺术家可以抛开实际,尽情在幻想的世界里翱翔,我们是工程师,一切都要有据可依.有理可寻,不切实际的构想永远只能是构想,永远无法升级为设计。记得我曾经设计了一个很“艺术化”的减速器箱盖吊钩,然后找老师询问,结果马上被老师否定了,因为这样的设计,理
13、论上可用,实际上加工困难,增加产品成本。所以我们工程师搞设计不要认为自己是艺术家,除非是外形包装设计。另外,课堂上也有部分知识不太清楚,于是我又不得不边学边用,时刻巩固所学知识,这也是我作本次课程设计的第二大收获。8、 参考文献【1】机械原理课程设计手册-邹慧君【2】机械原理教程-申永胜【3】机械原理辅导与习题【4】机械设计第八版-濮良贵【5】solidworks2009从入门到提高【6】机械设计课程设计指导书【7】平面连杆机构设计-张世民【8】计算机CAD/CAM辅助设计【9】vb入门与提高【10】VB在平面四连杆机构运动分析中的应用【11】工程图学-鲁屏宇撰写设计说明书:(课程设计说明书是
14、技术说明书的一种,是对课程设计的总结。主要内容包括:(1)课程设计题目简介; (2) 功能分解;(3) 原始数据及计算;(4)机械传动系统的设计计算(简述方案设计思路及讨论、改进); (5) 执行机构的选型及评价以及设计步骤或分析计算过程;(6) 机械运动方案简图的绘制、机械运动系统尺度计算、机构运动分析等(7) 对所设计的结果分析讨论; (8) 感想与建议。说明书用16K纸张书写,并按以下顺序装订成册:封面(按指定的统一格式)、课程设计任务书、摘要、目录、正文、参考文献。)完成日期: 2011 年 6月 25日 指导教师 张洪双 九、附录:Vb部分源程序: Dim res As String
15、 Const pi = 3.141592653 定义全局变量Public l As Single, l1 As Single, lv1 As Single, la1 As SinglePublic l2 As Single, lv2 As Single, la2 As SinglePublic r As Single, dt As SinglePublic ct As Single, cv As Single, ca As SinglePublic ct1 As Single, cv1 As Single, ca1 As SinglePublic ct2 As Single, cv2 As S
16、ingle, ca2 As SinglePublic ct3 As Single, cv3 As Single, ca3 As SinglePublic u As Single, v As Single, u1 As Single, v1 As Single, u2 As Single, v2 As SinglePublic x1 As Single, y1 As Single, xv1 As Single, yv1 As Single, xa1 As Single, ya1 As SinglePublic x2 As Single, y2 As Single, xv2 As Single,
17、yv2 As Single, xa2 As Single, ya2 As SinglePublic x3 As Single, y3 As Single, xv3 As Single, yv3 As Single, xa3 As Single, ya3 As SinglePublic x4 As Single, y4 As Single, xv4 As Single, yv4 As Single, xa4 As Single, ya4 As SinglePublic xp As Single, yp As Single 定义中间变量Public w As SinglePublic a1 As
18、Single, a2 As Single, a3 As Single, a4 As SinglePublic a5 As Single, a6 As Single, a7 As Single, a8 As SinglePublic c As Single, d As Single, d7 As Single, d8 As Single, h1 As Single, h2 As SinglePublic e As Single, e1 As Single, e2 As Single, e3 As SinglePublic f As Single, f1 As Single, f2 As Sing
19、le, f3 As SinglePublic g As Single, h As Single, i1 As SinglePublic k As Single, k1 As Single, k2 As SinglePublic n7 As Single, n8 As SinglePublic m As Integer, m1 As Integer, kp As IntegerPublic t1 As Single, t2 As Single 定义主程序变量 Dim i As Integer, j As Integer, n As Integer Public d1, d2, d3, d4, d
20、5, d6 As Single Public sxa, sxb, sxc, sxd, sxe, sxf As Single, sya, syb, syc, syd, sye, syf As Single Public vxa, vxb, vxc, vxd, vxe, vxf As Single, vya, vyb, vyc, vyd, vye, vyf As Single Public axa, axb, axc, axd, axe, axf As Single, aya, ayb, ayc, ayd, aye, ayf As Single Public dj1, dj2, dj3, dj4,
21、 dj5 As Single Public dv1, dv2, dv3, dv4, dv5 As Single Public da1, da2, da3, da4, da5 As Single Public s, sb, sc, sd, se, sf As Single, vb, vc, vd, ve, vf As Single, ab, ac, ad, ae, af As Single 定义演示动画变量 Public fd As Integer Dim xa As Single, ya As Single Dim xb As Single, yb As Single Dim xc As Si
22、ngle, yc As Double Dim xd As Single, yd As Single Dim xe As Single, ye As Single Dim xf As Single, yf As Single 定义各个绞支点的坐标 Dim bc As Single Dim djk, djk2 As Single Public smax, smin As Single Private Sub Form_Load()dj1 = 0fd = 3000bc = 1 * pi / 180设置各行的宽度MSFGrd.ColWidth(0) = 700: MSFGrd.ColWidth(1)
23、= 700MSFGrd.ColWidth(2) = 1100: MSFGrd.ColWidth(3) = 1100MSFGrd.ColWidth(4) = 1500MSFGrd2.ColWidth(0) = 700: MSFGrd3.ColWidth(1) = 700MSFGrd2.ColWidth(2) = 1100: MSFGrd3.ColWidth(3) = 1100MSFGrd2.ColWidth(4) = 1500MSFGrd3.ColWidth(0) = 700: MSFGrd3.ColWidth(1) = 700MSFGrd3.ColWidth(2) = 1100: MSFGrd
24、3.ColWidth(3) = 1100MSFGrd3.ColWidth(4) = 1500MSFGrd4.ColWidth(0) = 700: MSFGrd4.ColWidth(1) = 700MSFGrd4.ColWidth(2) = 1100: MSFGrd4.ColWidth(3) = 1100MSFGrd4.ColWidth(4) = 1500设置表头MSFGrd.TextMatrix(0, 0) = 组数MSFGrd.TextMatrix(0, 1) = 角度MSFGrd.TextMatrix(0, 2) = 水平位移s(m)MSFGrd.TextMatrix(0, 3) = 速度
25、v(m/s)MSFGrd.TextMatrix(0, 4) = 加速度a(m/s2)MSFGrd2.TextMatrix(0, 0) = 组数MSFGrd2.TextMatrix(0, 1) = 角度MSFGrd2.TextMatrix(0, 2) = 水平位移s(m)MSFGrd2.TextMatrix(0, 3) = 速度v(m/s)MSFGrd2.TextMatrix(0, 4) = 加速度a(m/s2)MSFGrd3.TextMatrix(0, 0) = 组数MSFGrd3.TextMatrix(0, 1) = 角度MSFGrd3.TextMatrix(0, 2) = 水平位移s(m)
26、MSFGrd3.TextMatrix(0, 3) = 速度v(m/s)MSFGrd3.TextMatrix(0, 4) = 加速度a(m/s2)MSFGrd4.TextMatrix(0, 0) = 组数MSFGrd4.TextMatrix(0, 1) = 角度MSFGrd4.TextMatrix(0, 2) = 滑块位移s(m)MSFGrd4.TextMatrix(0, 3) = 速度v(m/s)MSFGrd4.TextMatrix(0, 4) = 加速度a(m/s2)设置字体对齐方式MSFGrd.ColAlignment(0) = 2MSFGrd.ColAlignment(1) = 2MSF
27、Grd.ColAlignment(2) = 3MSFGrd.ColAlignment(3) = 3MSFGrd.ColAlignment(4) = 3MSFGrd2.ColAlignment(0) = 2MSFGrd2.ColAlignment(1) = 2MSFGrd2.ColAlignment(2) = 3MSFGrd2.ColAlignment(3) = 3MSFGrd2.ColAlignment(4) = 3MSFGrd3.ColAlignment(0) = 2MSFGrd3.ColAlignment(1) = 2MSFGrd3.ColAlignment(2) = 3MSFGrd3.C
28、olAlignment(3) = 3MSFGrd3.ColAlignment(4) = 3MSFGrd4.ColAlignment(0) = 2MSFGrd4.ColAlignment(1) = 2MSFGrd4.ColAlignment(2) = 3MSFGrd4.ColAlignment(3) = 3MSFGrd4.ColAlignment(4) = 3form3.ShowEnd SubPublic Sub zhu()d1: ab杆 , d2: bc杆 , d3: cd杆 , d4: de杆 , d5: ef杆数据组1kp = 1d1 = Text5(0).Text * fdsxa = 0
29、: sya = 0vxa = 0: vya = 0axa = 0: aya = 0 dv1 = 1: da1 = 0数据组2m = 1d2 = Text5(1).Text * fd: d3 = Text5(2) * fdsxd = Text6.Text * fd: syd = Text7.Text * fdvxd = 0: vyd = 0axd = 0: ayd = 0数据组3d4 = Text5(3).Text * fdco = pi / 2 - 2.094数据组4d5 = Text5(4).Text * fd: m1 = 1dj5 = 270 * pi / 180: dv5 = 0: da
30、5 = 0ssl单杆组主程序(ab杆)l = d1ct = dj1: cv = dv1: ca = da1x1 = sxa: y1 = sya: xv1 = vxa: yv1 = vya: xa1 = axa: ya1 = ayaCall SSLsxb = x2: syb = y2vxb = xv2: vyb = yv2axb = xa2: ayb = ya2sb = Sqr(sxb * sxb + syb * syb)vb = Sqr(vxb * vxb + vyb * vyb)ab = Sqr(xab * xab + yab * yab) 求解出单杆端点a的位移,线速度,线加速度rrr杆组
31、主程序(bcd杆)l1 = d2: l2 = d3x1 = sxb: y1 = syb: x2 = sxd: y2 = sydCall RRRdj2 = ct1: dv2 = cv1: da2 = ca1求c参量 l = d2ct = dj2: cv = dv2: ca = da2x1 = sxb: y1 = syb: xv1 = vxb: yv1 = vyb: xa1 = axb: ya1 = aybCall SSLdj3 = ct2: dv3 = cv2: da3 = ca2sxb = x1: syb = y1: vxb = xv1: vyb = yv2: axb = xa1: ayb =
32、 ya2sxc = x2: syc = y2: vxc = xv2: vyc = yv2: axc = xa2: ayc = ya2sc = Sqr(sxc * sxc + syc * syc)vc = Sqr(vxc * vxc + vyc * vyc)ac = Sqr(axc * axc + ayc * ayc) 求解出单杆端点c的位移,线速度,线加速度ReDim Preserve a(1 To n)Call putarr(sc, i)将计算结果写入到表格中固连杆的参数(de杆)l = d4ct = dj3 - co: cv = dv3: ca = da3x1 = sxd: y1 = sy
33、d: xv1 = vxd: yv1 = vyd: xa1 = axd: ya1 = aydCall SSLdj4 = ctsxe = x2: sye = y2vxe = xv2: vye = yv2axe = xa2: aye = ya2se = Sqr(sxe * sxe + sye * sye)ve = Sqr(vxe * vxe + vye * vye)ae = Sqr(axe * xae + aye * aye)rrp杆组(ef杆)l1 = d4: l2 = d5ct3 = dj5: cv3 = dv5: ca3 = da5x1 = sxe: y1 = sye: xv1 = vxe:
34、yv1 = vye: xa1 = axe: ya1 = ayexp = sxd: yp = syd: xvp = vxd: yvp = vyd: xap = axd: yap = aydCall RRPdj5 = pi + ct2: dv4 = cv2: da4 = ca2sxf = x2: syf = y2vxf = xv2: vyf = yv2axf = xa2: ayf = ya2sf = svf = vyfaf = ayfdj1 = dj1 + bcText1.Text = Val(sxb)Text2.Text = Val(syb)Text3.Text = Val(sxc)Text4.
35、Text = Val(syc)End SubPrivate Sub Form_Click()MsgBox Chr(10) + 请选择按钮进行计算, vbCritical, 机械原理运动分析End Sub表格生成Private Sub CndOk_Click()res = title.Caption = 运动分析结果:n = 360dj1 = 0 复位djk2 = dj1smax = -10000000: smin = 10000000For i = 1 To nCall zhu第一组MSFGrd.TextMatrix(i, 0) = Str(i)MSFGrd.TextMatrix(i, 1)
36、= Str(Int(dj1 * 180 / pi + 0.5)MSFGrd.TextMatrix(i, 2) = Str(Int(sxb * 100000 / fd + 0.5) / 100000)MSFGrd.TextMatrix(i, 2) = Format(MSFGrd.TextMatrix(i, 2), 0.000)MSFGrd.TextMatrix(i, 3) = Str(Int(vb * 10000 / fd + 0.5) / 10000)MSFGrd.TextMatrix(i, 3) = Format(MSFGrd.TextMatrix(i, 3), 0.00)MSFGrd.Te
37、xtMatrix(i, 4) = Str(Int(ab * 10000 / fd + 0.5) / 10000)MSFGrd.TextMatrix(i, 4) = Format(MSFGrd.TextMatrix(i, 4), 0.00)第二组MSFGrd2.TextMatrix(i, 0) = Str(i)MSFGrd2.TextMatrix(i, 1) = Str(Int(dj3 * 18000 / pi + 0.5) / 100)MSFGrd2.TextMatrix(i, 1) = Format(MSFGrd2.TextMatrix(i, 1), 0.00)MSFGrd2.TextMat
38、rix(i, 2) = Str(Int(sxc * 10000 / fd + 0.5) / 10000)MSFGrd2.TextMatrix(i, 2) = Format(MSFGrd2.TextMatrix(i, 2), 0.000)MSFGrd2.TextMatrix(i, 3) = Str(Int(vc * 10000 / fd + 0.5) / 10000)MSFGrd2.TextMatrix(i, 3) = Format(MSFGrd2.TextMatrix(i, 3), 0.000)MSFGrd2.TextMatrix(i, 4) = Str(Int(ac * 10000 / fd
39、 + 0.5) / 10000)MSFGrd2.TextMatrix(i, 4) = Format(MSFGrd2.TextMatrix(i, 4), 0.000)第三组MSFGrd3.TextMatrix(i, 0) = Str(i)MSFGrd3.TextMatrix(i, 1) = Str(Int(dj4 * 18000 / pi + 0.5) / 100)MSFGrd3.TextMatrix(i, 1) = Format(MSFGrd3.TextMatrix(i, 1), 0.00)MSFGrd3.TextMatrix(i, 2) = Str(Int(sxe * 10000 / fd
40、+ 0.5) / 10000)MSFGrd3.TextMatrix(i, 2) = Format(MSFGrd3.TextMatrix(i, 2), 0.000)MSFGrd3.TextMatrix(i, 3) = Str(Int(ve * 10000 / fd + 0.5) / 10000)MSFGrd3.TextMatrix(i, 3) = Format(MSFGrd3.TextMatrix(i, 3), 0.000)MSFGrd3.TextMatrix(i, 4) = Str(Int(ae * 10000 / fd + 0.5) / 10000)MSFGrd3.TextMatrix(i,
41、 4) = Format(MSFGrd3.TextMatrix(i, 4), 0.000)第四组MSFGrd4.TextMatrix(i, 0) = Str(i)MSFGrd4.TextMatrix(i, 1) = Str(Int(dj5 * 18000 / pi + 0.5) / 100)MSFGrd4.TextMatrix(i, 1) = Format(MSFGrd4.TextMatrix(i, 1), 0.00)MSFGrd4.TextMatrix(i, 2) = Str(Int(syf * 10000 / fd + 0.5) / 10000)MSFGrd4.TextMatrix(i,
42、2) = Format(MSFGrd4.TextMatrix(i, 2), 0.000)MSFGrd4.TextMatrix(i, 3) = Str(Int(vyf * 10000 / fd + 0.5) / 10000)MSFGrd4.TextMatrix(i, 3) = Format(MSFGrd4.TextMatrix(i, 3), 0.000)MSFGrd4.TextMatrix(i, 4) = Str(Int(af * 10000 / fd + 0.5) / 10000)MSFGrd4.TextMatrix(i, 4) = Format(MSFGrd4.TextMatrix(i, 4
43、), 0.000)求滑块的冲程If (syf smax) Thensmax = syfEnd IfIf (syf smin) Thensmin = syfEnd Ifs = smax - sminLabel1.Caption = Val(s / fd * 1000)djk2 = djk2 + bcNext iForm3.ShowEnd Sub 单杆运动分析子程序Public Sub SSL()x2 = x1 + l * Cos(ct)y2 = y1 + l * Sin(ct)If (kp = 1) Then xv2 = xv1 - l * Sin(ct) * cv yv2 = yv1 + l
44、* Cos(ct) * cv xa2 = xa1 - l * Sin(ct) * ca - l * Cos(ct) * cv * cv ya2 = ya1 + l * Cos(ct) * ca - l * Sin(ct) * cv * cvEnd IfEnd Sub RRR杆组运动分析子程序Public Sub RRR()u = x2 - x1v = y2 - y1u1 = xv2 - xv1v1 = yv2 - yv1u2 = xa2 - xa1v2 = ya2 - ya1c = (u * u) + (v * v) + (l2 * l2) - (l1 * l1) / 2 / l2k = v
45、* v + u * u - c * cIf (k 0) Then MsgBox DYDA CANT BE ASSEMBLED, vbExclamation, Str(dj) EndElse n7 = v + m1 * Sqr(k) d7 = u - c If (Abs(d7) 0.0000001) Then ct2 = pi Else ct2 = 2 * Atn(n7 / d7) End If If (d7 0) Then ct2 = ct2 + 2 * pi Else If (d7 0 And n7 0) Then ct2 = ct2 - 2 * pi End If End If n7 =
46、v + l2 * Sin(ct2) d7 = u + l2 * Cos(ct2) If (Abs(d7) 0.0000001) Then ct1 = pi / 2 Else ct1 = Atn(n7 / d7) End If If (d7 0) Then ct1 = ct1 + pi Else If (d7 0 And n7 0) Then ct1 = ct1 - pi End If End If If (kp = 1) Then a1 = -l1 * Sin(ct1) a2 = l1 * Cos(ct1) a3 = l2 * Sin(ct2) a4 = -l2 * Cos(ct2) d8 =
47、 a1 * a4 - a2 * a3 If (Abs(d8) 0.000000001) Then MsgBox DYDA IS IN UNCERTAINTY, vbExclamation, 机械原理 End End If cv1 = (a4 * u1 - a3 * v1) / d8 解出两杆的角速度 cv2 = (a1 * v1 - a2 * u1) / d8 e = u2 + a2 * cv1 * cv1 + a4 * cv2 * cv2 f = v2 - a1 * cv1 * cv1 - a3 * cv2 * cv2 ca1 = (a4 * e - a3 * f) / d8 ca2 = (
48、a1 * f - a2 * e) / d8 解出两杆的角加速度 End IfEnd IfEnd Sub RRP杆组运动分析子程序Public Sub RRP()e1 = 2 * (xp - x1) * Cos(ct3) + 2 * (yp - y1) * Sin(ct3)f1 = (xp - x1) 2 + (yp - y1) 2 - l2 2k1 = e1 2 - 4 * f1If (k1 0) Then MsgBox DYDA CANT BE ASSEMBLED, vbExclamation, Str(dj) End Else If (k1 = 0) Then s = Sqr(k1) /
49、2 End If s = Abs(-e1 + m * Sqr(k1) / 2 x2 = xp + s * Cos(ct3) y2 = yp + s * Sin(ct3) n8 = y2 - y1 d8 = x2 - x1 If (Abs(d8) 0.0000001) Then ct2 = pi Else ct2 = Atn(n8) / (d8) End If If (d8 0) Then ct2 = ct2 + pi Else If (d8 0 And n8 0) Then ct2 = ct2 - pi End If End If e2 = xvp - xv1 - s * cv3 * Sin(
50、ct3) f2 = yvp - yv1 + s * cv3 * Cos(cv3) t1 = l2 * Sin(ct2) * Sin(ct3) + l2 * Cos(ct2) * Cos(ct3) t2 = Sin(ct2) * Sin(ct3) + Cos(ct2) * Cos(ct3) cv2 = (-e2 * Sin(ct2) + f2 * Cos(ct2) / t1 v2 = -(e2 * Cos(ct2) + f2 * Sin(ct2) / t2 xv2 = xv1 - l2 * cv2 * Sin(ct2) yv2 = yv1 + l2 * cv2 * Cos(ct2) e3 = x
51、ap - xa1 + l2 * cv2 2 * Cos(ct2) - 2 * v2 * Sin(ct3) - ca3 * s * Sin(ct3) - cv3 2 * s * Cos(ct3) f3 = yap - ya1 + l2 * cv2 2 * Sin(ct2) - 2 * v2 * Cos(ct3) - ca3 * s * Cos(ct3) - cv3 2 * s * Sin(ct3) ca2 = (-e3 * Sin(ct2) + f3 * Cos(ct2) / t1 a2 = -(e3 * Cos(ct2) + f3 * Sin(ct2) / t2 xa2 = xa1 - cv2
52、 2 * l2 * Cos(ct2) - ca2 * l2 * Sin(ct2) ya2 = ya1 - cv2 2 * l2 * Sin(ct2) + ca2 * l2 * Cos(ct2)End If End Sub控件设置Private Sub Command1_Click()Timer1.Interval = 1If Timer1.Enabled = True ThenTimer1.Enabled = FalseElse:Timer1.Enabled = TrueEnd IfTimer1_TimerEnd SubPrivate Sub Command2_Click()Form2.Sho
53、wEnd SubPublic Sub huitu()Call zhudj1 = dj1 + 0.1 * bcEnd SubPublic Sub putarr(num As Single, i As Integer)a(i) = numEnd SubPublic Sub chushi()dj1 = 0End Sub动画显示Private Sub Timer1_Timer()bc = 1 * pi / 180djk = dj1Call zhuxa = Picture1.ScaleWidth / 3ya = Picture1.ScaleHeight / 2 + 1500xb = xa + sxbyb
54、 = ya + sybxc = xa + sxcyc = ya + sycxd = xa + sxdyd = ya + sydxe = xa + sxeye = ya + syexf = xa + sxfyf = ya + syf水平翻转yb = 2 * ya - ybyc = 2 * ya - ycyd = 2 * ya - ydye = 2 * ya - yeyf = 2 * ya - yfPicture1.ClsPicture1.DrawWidth = 8Picture1.Circle (xa, ya), 1, QBColor(4)Picture1.Circle (xb, yb), 1,
55、 QBColor(4)Picture1.Circle (xc, yc), 1, QBColor(4)Picture1.Circle (xd, yd), 1, QBColor(4)Picture1.Circle (xe, ye), 1, QBColor(4)Picture1.Circle (xf, yf), 50, QBColor(9) 画铰链a,b,c,d画导杆Picture1.DrawWidth = 2Picture1.Line (xd - 100, yd + d5 - d4)-(xd - 100, yd + d5 - d4 + 300), QBColor(0)Picture1.Line (xd + 100, yd + d5 - d4)-(xd + 100, yd + d5 - d4 + 300), QBColor(0)画连杆Picture1.DrawWidth = 5Picture1.Line (xa, ya)-(xb, yb), QBColor(1)Picture1.Line (xb, yb)-(xc, yc), QBColor(2)Picture1.Line
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
