《自动控制原理课程设计直流电机PI控制器设计与稳态性能分析》由会员分享,可在线阅读,更多相关《自动控制原理课程设计直流电机PI控制器设计与稳态性能分析(20页珍藏版)》请在装配图网上搜索。
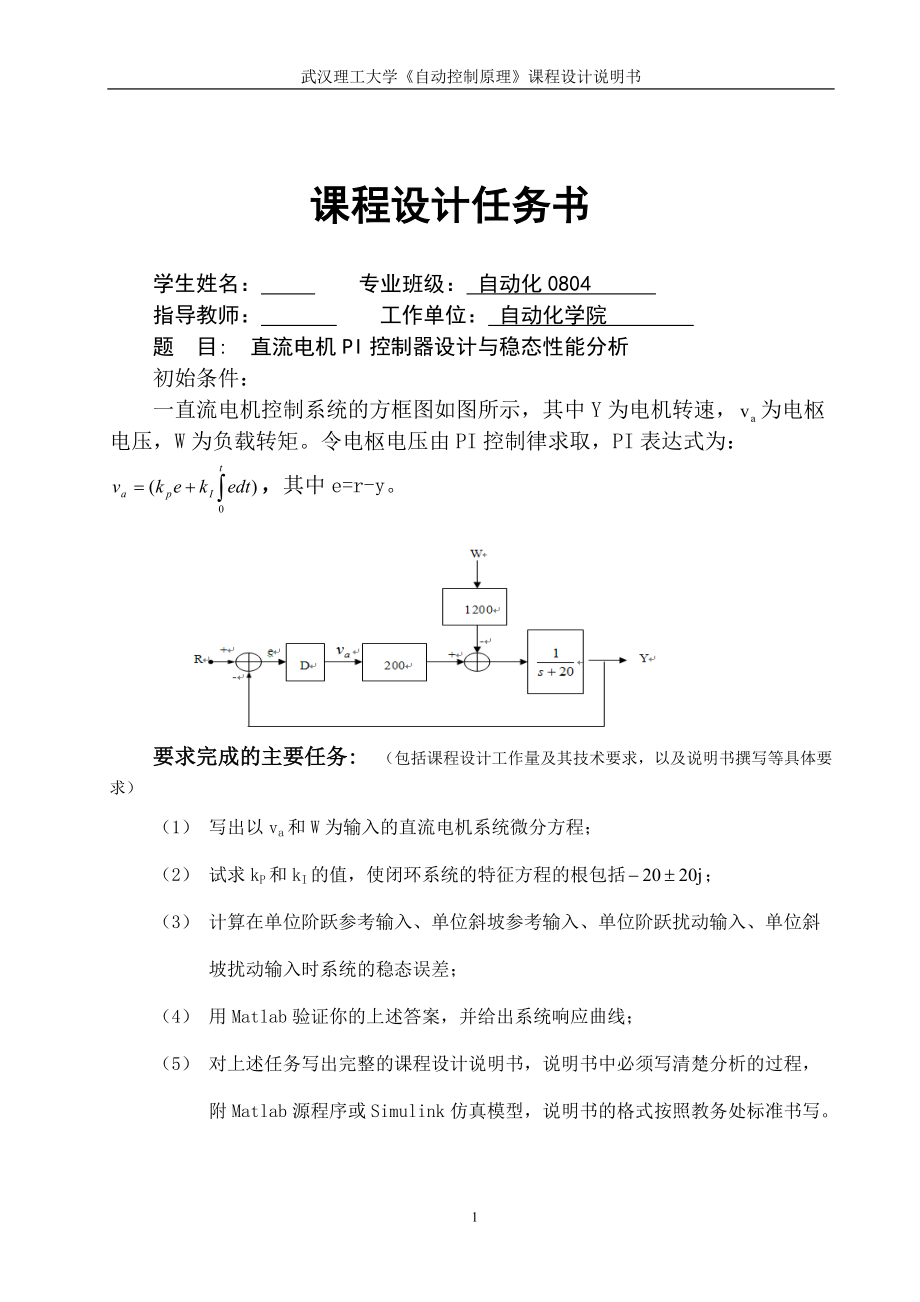
1、武汉理工大学自动控制原理课程设计说明书课程设计任务书学生姓名: 专业班级: 自动化0804 指导教师: 工作单位: 自动化学院 题 目: 直流电机PI控制器设计与稳态性能分析 初始条件:一直流电机控制系统的方框图如图所示,其中Y为电机转速,为电枢电压,W为负载转矩。令电枢电压由PI控制律求取,PI表达式为:,其中e=r-y。要求完成的主要任务: (包括课程设计工作量及其技术要求,以及说明书撰写等具体要求)(1) 写出以va和W为输入的直流电机系统微分方程;(2) 试求kP和kI的值,使闭环系统的特征方程的根包括;(3) 计算在单位阶跃参考输入、单位斜坡参考输入、单位阶跃扰动输入、单位斜坡扰动输
2、入时系统的稳态误差;(4) 用Matlab验证你的上述答案,并给出系统响应曲线;(5) 对上述任务写出完整的课程设计说明书,说明书中必须写清楚分析的过程,附Matlab源程序或Simulink仿真模型,说明书的格式按照教务处标准书写。摘要自动控制技术已经广泛应用于工农业生产、交通运输和国防建设的各个领域。自动控制技术以控制理论为基础,以计算机为手段,解决了一系列高科技难题,诸如宇宙航行、航空航天工程、导弹制导与导弹防御体系等领域的一些高精度控制问题等,在科学技术现代化的发展与创新过程中正发挥着越来越重要的作用。计算机技术和信息技术的迅速发展,加快了社会信息化的进程,拓宽了自动化专业的发展空间。
3、针对以上方面,我们这次的课程设计主要是针对系统误差进行分析,深学生对相关课程基础知识与基本理论的理解和掌握,培养学生综合运用所学知识的能力,并增强解决实际问题的能力。增强理论分析、设计计算、制图标准与规范、查阅设计手册与资料的能力,同时加强我们的计算机的应用能力。掌握用MATLAB软件来对原理图进行仿真进行辅助分析。 此次课程设计要求综合运用所学自控原理理论知识,是自动控制原理和MATLAB软件的综合运用,需要灵活运用所学知识,根据设计要求,来达到分析原理、参数计算等目的。目录1 设计意义及要求11.1 设计意义11.2 设计要求12 设计原理22.1 PI校正控制原理22.2 叠加原理23
4、主要任务43.1 写控制系统微分方程43.2 求Kp和KI的值43.3 计算稳态误差53.4 验证程序和图形64 体会和总结155参考文献16171 设计意义及要求1.1 设计意义自动控制原理课程是一门理论性和工程实践性均较强的专业基础课,它在航天、农业、交通、电气、机械制造等工程学科中都有非常广泛、重要的应用。学校安排了这次的自动控制课程设计,目的在与让学生综合运用所学的知识,培养学生对控制系统的分析设计能力和创新能力,更好地锻炼学生的创新思维和设计能力。1.2 设计要求D200RYe+-+1200W-一直流电机控制系统的方框图如图所示,其中Y为电机转速,为电枢电压,W为负载转矩。令电枢电压
5、由PI控制定律求取,PI表达式为:,其中e=r-y。 图 1 直流电机控制系统的方框图要求完成的主要任务: (包括课程设计工作量及其技术要求,以及说明书撰写等具体要求)(6) 写出以va和W为输入的直流电机系统微分方程;(7) 试求kP和kI的值,使闭环系统的特征方程的根包括;(8) 计算在单位阶跃参考输入、单位斜坡参考输入、单位阶跃扰动输入、单位斜坡扰动输入时系统的稳态误差;(9) 用Matlab验证上述答案,并给出系统响应曲线;(10) 对上述任务写出完整的课程设计说明书,说明书中必须写清楚分析的过程,附Matlab源程序或Simulink仿真模型,说明书的格式按照教务处标准书写。2 设计
6、原理2.1 PI校正控制原理比例积分控制规律的控制器,称PI控制器(如图2所示),其输出m(t)式中为可调比例系数;为可调积分时间常数。S R (S) E(S) M(S) C(S) 图 2 PI控制器在串联校正时,PI控制器相当于在系统中增加了一个位于原点的开环极点,同时也增加了一个位于S左半平面的开环零点。位于原点的极点可以提高系统的型别,可以消除或减小系统的稳态误差,改善系统的稳态性能;而增加的负实数零点则用来减小系统的阻尼程度,缓和PI控制器极点对系统稳定性及动态过程产生的不利影响。只要积分时间常数足够大,PI控制器对系统稳定性的不利影响可大为减弱。在控制工程实践中,PI控制器主要用来改
7、善控制系统的稳态性能。2.2 叠加原理图1所给的系统结构图,是有用输入,称为输入信号; 是扰动信号;是系统的输出信号。为了研究有用输入作用对系统输出信号的影响,需要求有用输入作用下的闭环传递函数。同样为了研究扰动作用对系统输出信号的影响,也需要求取扰动作用下的闭环传递函数。此外,在控制系统的分析和设计中,还常用到在输入信号或扰动作用下,以误差信号作为输出量的闭环误差传递函数或 ,以此用于研究系统的稳态误差。其中,以误差信号作为输出量的传递函数称为误差传递函数。叠加原理即在的条件下,求出输入信号作用下闭环传递函数,在的条件下,求扰动输入信号作用下闭环传递函数3 主要任务3.1 写控制系统微分方程
8、令图1中的输入为零,可以得到方程:两边同时乘以可得:最后进行拉式反变换得:3.2 求Kp和KI的值(1)先求PI控制器的传递函数已知,两边同时进行拉式变换可得:得其相应的传递函数:(2)求系统开环传递函数和闭环传递函数当扰动输入时系统的开环传递函数为: 由开环传递函数可求得闭环传递函数为: (3)求闭环特征方程及其解闭环特征方程为:特征根为:(4)求解和因为闭环系统特征根包括所以有: 解方程得: 3.3 计算稳态误差3.3.1单位阶跃参考输入时系统稳态误差令,并将、带入开环传递函数得:于是、开环增益K=40,为一型系统。静态位置误差系数为:稳态误差为:因此当输入为单位阶跃信号时系统的稳态误差为
9、0。3.3.2单位斜坡参考输入时系统稳态误差令,并将、带入开环传递函数得:于是、开环增益K=60,为一型系统。静态速度误差系数为:稳态误差为:则系统对单位斜坡输入信号的稳态误差约为0.025。3.3.3单位阶跃扰动输入时系统稳态误差当时系统在扰动下输出量的实际值为:而输出量的希望值为零,因此误差信号为:系统在时的稳态误差:因此系统在单位阶跃扰动转矩作用下的稳态误差为03.3.4单位斜坡扰动输入时系统稳态误差系统在时的稳态误差:因此系统斜坡扰动转矩作用下的稳态误差约为1.5。3.4 验证程序和图形3.4.1单位阶跃参考输入时系统响应扰动时系统的闭环传递函数为 求单位阶跃参考输入时响应,即负载转矩
10、W(s)=0,输入为R(s)=1/s的直流电机控制系统得输出响应,MATLAB的Editor/Debugger输入程序为:num=20, 800den=1,40, 800t=0:0.001:0.5step(num,den,t)xlabel(t);ylabel(y(t);title(step response)得图3所示的系统响应曲线。 图 3 单位阶跃参考输入时系统响应曲线在图形中可以直观看出,当经过一段调节时间后系统输出趋近于1,达到稳态,与输入相等,因此在单位阶跃参考输入时系统的稳态误差为零,与计算得出的数值相同。Simulink仿真模型为: 图(4)单位阶跃参考输入时系统的simulin
11、k仿真模型 单位阶跃输入时系统的响应曲线: 图(5)单位阶跃参考输入时系统响应曲线由图像可知系统稳态误差值等于0,与计算值相同。3.4.2单位斜坡参考输入时系统响应求单位斜坡参考输入时响应,即负载转矩W(s)=0,输入为的直流电机控制系统得输出响应,MATLAB的Editor/Debugger输入程序为:num=20, 800den=1,40, 800sys=tf(num,den)t=0:0.001:0.5u=tlsim(sys,u,t,0);gridxlabel(t);ylabel(y(t);title(ramp response)得图6所示的系统仿真响应曲线。 图(6) 单位斜坡参考信号输
12、入时系统的响应曲线由图6可知,在经过一段时间的调节时间后,系统达到稳定,系统的输出响应曲线与输入曲线相互平行,因此在单位斜坡参考信号输入时系统存在误差约为0.025,与计算所的结论基本相同。Simulink仿真模型为: 图(7)单位斜坡参考输入时系统的simulink仿真模型单位阶跃输入时系统的响应曲线: 图(8)单位阶跃参考输入时系统响应曲线由图可知稳态误差与计算值大致相等。3.4.3单位阶跃扰动输入时系统响应要求单位阶跃扰动输入时系统的输出响应曲线,即输入为R(s)=0,负载转矩W(s)=1/s的直流电机控制系统输出响应, 此时系统所对应的闭环传递函数为在MATLAB的Editor/Deb
13、ugger输入程序为:num=-1200,0den=1,40, 800t=0:0.001:0.5step(num,den,t)xlabel(t);ylabel(y(t);title(step response)得图(9)所示的系统仿真响应曲线。 图(9) 单位阶跃扰动输入时系统的响应曲线由图(9)可知,当经过一小段调节时间后系统的输出响应趋于稳定,系统的输出与输入相等均为1。所以在单位阶跃扰动输入时,系统的误差为0,与计算所得结果一致。Simulink仿真模型为: 图(10) 单位阶跃扰动输入时系统的simulink仿真模型单位阶跃扰动输入时系统响应曲线: 图(11) 单位阶跃扰动输入时系统响
14、应曲线由图像可知系统稳态误差,与计算值相同。3.4.4单位斜坡扰动输入时系统响应要求单位斜坡扰动输入时系统的输出响应曲线,即输入为R(s)=0,负载转矩的直流电机控制系统输出响应, 此时系统所对应的闭环传递函数为:在MATLAB的Editor/Debugger输入程序为:num=-1200,0den=1,40, 800sys=tf(num,den)t=0:0.001:0.5u=tlsim(sys,u,t,0);gridxlabel(t);ylabel(y(t);title(ramp response)得图(12)所示的仿真的系统响应曲线。图(12) 单位斜坡扰动输入时系统的响应由图(12)知,
15、经过一段调节时间后,系统的输出响应曲近于1.5,与计算结果一致。Simulink仿真模型为: 图(13)单位斜坡扰动输入时系统的simulink仿真模型单位斜坡扰动输入时系统响应曲线为:图(14) 单位斜坡扰动输入时系统响应曲线由图像可知系统的稳态误差为:,与计算值一致。所以可知上面的计算结果都是正确的。4 体会和总结为期两周的自动控制课程设计很快结束了,本次课程设计使我获益匪浅,不仅锻炼了理论知识,而且还学习了matlab的使用。Matlab是一款专业的编程与仿真软件,如果已知一个控制系统的方框图,很容易就可以通过matlab仿真得出该控制系统的响应曲线和稳态误差。Matlab在自动控制原理
16、中的应用十分广泛,本来我对于matlab的使用不太熟悉,通过本次课程设计,学会了matlab的基本使用方法。通过本次课程设计我也知道了理论知识的重要性,结束了自动控制原理这门课,在掌握了一定基础的前体下,进行此次课程设计,能够让我们更好的理解课本上学习的内容,并能够向活学活用的方向发展。这次的课程设计,让我们有机会将理论联系实际,并通过对理论知识的综合利用,掌握自动控制系统分析的基本思想和方法,为我们以后的专业学习打下了良好的基础。5参考文献1 胡寿松主编.自动控制原理.北京:科学出版社,2007(第五版)2 王建辉,顾树生主编.自动控制原理.北京:清华大学出版社,20073 李友善编著.自动
17、控制原理.北京:国防工业出版社,2005(第三版)4 黄忠霖.自动控制原理的matlab实现.北京:国防工业出版社,20075 王正林等编著. MATLAB/Simulink与控制系统仿真.北京:电子工业出版社,2008(第2版)本科生课程设计成绩评定表姓 名徐子伟性 别男专业、班级自动化专业0804班课程设计题目:直流电机PI控制器设计与稳态性能分析课程设计答辩或质疑记录:1、 求取系统稳态误差的方法有哪些?答:求取一个系统的稳态误差一般有两种方法:(1)根据系统原理图求取误差传递函数,利用终值定理求取。(2)根据系统的型号,利用误差系数法进行求取。2、 如何利用MATLAB软件检验结果是否正确?答:(1)根据传递函数编写MATLAB校验。 (2)利用MATLAB下的Simulink仿真模型对系统进行仿真检验。成绩评定依据:最终评定成绩(以优、良、中、及格、不及格评定)指导教师签字: 2010年01月09日
 自动控制原理课程设计直流电机PI控制器设计与稳态性能分析
自动控制原理课程设计直流电机PI控制器设计与稳态性能分析