 roboguide仿真说明手册
roboguide仿真说明手册

《roboguide仿真说明手册》由会员分享,可在线阅读,更多相关《roboguide仿真说明手册(29页珍藏版)》请在装配图网上搜索。
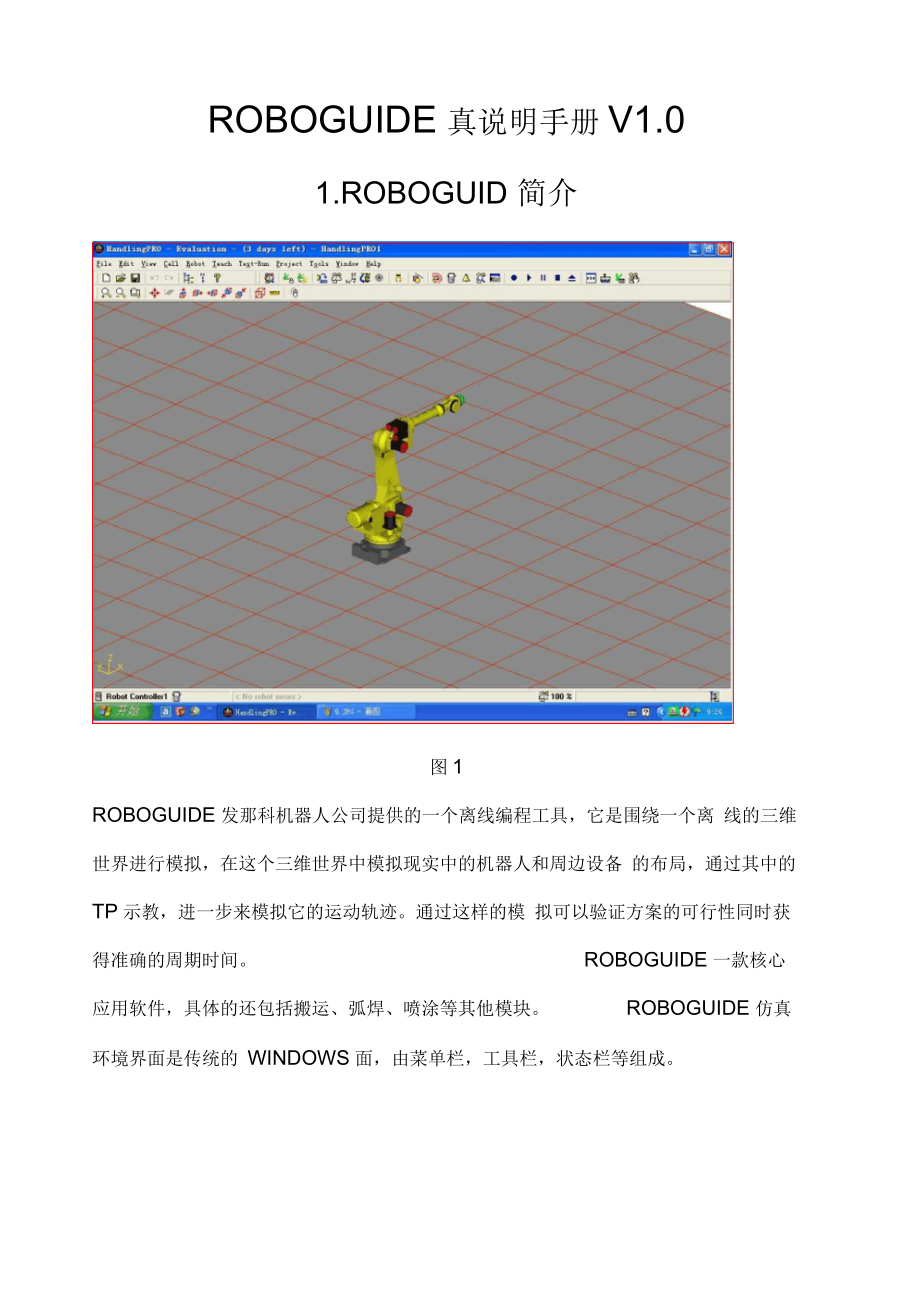
1、ROBOGUIDE真说明手册V1.0 1.ROBOGUID 简介 图1 ROBOGUIDE发那科机器人公司提供的一个离线编程工具,它是围绕一个离 线的三维世界进行模拟,在这个三维世界中模拟现实中的机器人和周边设备 的布局,通过其中的TP示教,进一步来模拟它的运动轨迹。通过这样的模 拟可以验证方案的可行性同时获得准确的周期时间。 ROBOGUIDE一款核心 应用软件,具体的还包括搬运、弧焊、喷涂等其他模块。 ROBOGUIDE仿真 环境界面是传统的 WINDOWS面,由菜单栏,工具栏,状态栏等组成。 2.简单工作环境的建立 1 .打开BOGUID哈单击工具栏上的新建按钮 叵
2、,建立一个新的工作环境, 出现如图2所示界面。 图2 2 .在图2这个界面下选择你所需要进行的仿真,这里包括搬运,弧焊等(根 据安装软件的不同这里的可选项目不同, 具体安装可以浏览安装光盘里的记 事本说明文件),确定后单击 Next进入下一个选择步骤,如图3. 图3 3 .在图3这个界面下你需要确定仿真的命名, 即在NamW输入仿真的名字, 也可以用默认的命名。命名完成后单击 Next进入下一个选择步骤,如图4 图4 4.在图4这个界面下是选择一个创建机器人的方式, 我们选择第一个创建一 个新的机器人,然后单击 Next进入下一个选择界面,如图5 图5 5 .
3、在图5这个界面下选择一个安装在机器人上的软件版本(版本越高功能越 多),然后单击Next进入下一个选择界面,如图6 图6 图7 6 .在图6这个界面下选择仿真所需要的工具,如点焊工具,弧焊工具,搬运 工具,根据仿真的需要选择合适的工具,然后单击 Next进入下一个选择界 面,如图7 7 .在图7这个界面下需要选择仿真所用的机器人, 这里几乎包含了所有的机 器人类型,然后单击Next进入下一个选择界面,如图8 图8 8 .在图8这个界面下当你现场需要多台机器人时,可以在这里继续添加,然 后单击Next进入下一个选择界面,如图9 图9
4、9.在图9这个界面下可以选择各类其他软件,将它们用于仿真,这里包括许 多常用的附加软件如2D 3D视觉应用和附加轴等都可以在这里添加,同时 你可以切换到Languages选项卡里设置语言环境,默认的是英语。然后单击 Next进入下一个选择界面,如图10。 山Vorlkizell Crn a-t inn Vixnrd I - S 0ltC;lKJn IHsTcilmaPAOi 2. Wcrkcu-ll Mdm" HaidlingPAfll 3. Hubok Cre-dtiion Method Cieate From scratcti 4. Fldbot SolBwari
5、e- Verxiorii VT.40 5. FlcboE Application/Tool Ha-idlingTaoll [H552] G: Grmup I Flcibcit Modell R 20DQiB/l &5F (H73B] 7: Arfciilkinal M otifin IGmupi. [renuj 口: Flnhot Dptronis S eit 土umrrtAry,p^ge 9: Si Lmmnrjjp Slep S - Sumrftary H wvitnw juui rhuiuHv bufuitf liriiEhinyi lh wiiir-ciid 图10
6、FANUC
Robotics
Hiwninr* S 匕金宿 FROM 32 MR CMOS 2 MH DRAM 32 MB I/O CoNimirMgrr up fix *iinMila
7、 FHL P^^vnv IHtibl J 10.在图 10这个 界面下 列出了 Ell-b 1-dj.t I:U 匚+11 MbH IfariK T-fc.lL-Bar. 什 i」e金!l 1研11 工11 整3 b RitiKrf i n / IliuididK尸HD 回哈■ * 〉 * b-valiMt ian. 《丁 dx-y j left) U*n.-dl mnSKU 1 :、 Hete Me -all Ihe- seleclions youve rnAde- rn Fite- wizard. Make sure everytniRg is icDfrect tar
8、 7aui sin-iLdat on.. Ihcn pr?ss Finislr ta -apply 步修改。这 之前所有选择的内容,是一个总的目录。如果确定之前没有错误,就单击 11。 Finish ;如果需要修改可以单击Back退回之前的步骤去做进 里单击Finish完成工作环境的建立,进入仿真环境如图 图11 11.ROBOGUIDE自动保存功能,所以进入仿真环境后可以先指定一下自动保 存目录,这样方便管理也不用担心数据丢失。 具体
9、操作步骤:单击菜单栏上的 Tools —Options出现如图对话框 在Default Workcell Path 中设置自己的保 存目录。 在 Default Image Library Path 中设置的是 ROBOGUIDE带的文件库。注意不要随意更 改文件库位置。 3.仿真环境下的基本操作 1 .鼠标基本操作: 平移:按住鼠标中键可以左右移动仿真模型; 旋转:按住鼠标右键可以旋转仿真模型; 放大缩小:滚动鼠标滚轮可以实现放大缩小(向前放大向后缩小); 2 .双击机器人出现如下对话框 ^.GP: 1 - -200018/165?, Robot C..
10、. Gener-ai | Group Infoinhation Model jR-2000iB/lG5F (7 Visfcfe Gerdize R由山| 17 Programs vr?tte ^hen ccniroltef 氏 口以 seteded 向 Teach Tool Visible Radus - I I i J I i— Whe \ifnt Transparent Locaijoni 0.000 m 0.000 mm 0.000 mrn OlOOO d&g 。山口 deg Q OQD deg 「 Shew Wark Enyeiope p S
11、how rabofl c口liwicin含 F Lock All LocaliDnVaK OK Cancel 1).单击Serialize Robot 可以重新更改基本工 作环境的设置,重新选择机器人的型号。 2) .Visible 控制机器人的显示状态。(即不勾 选时机器人不可见)。 3) .Teach Tool Visible 控制是否显示TCP点。 Radius控制TCP点的半径大小。 Help 5) .Lock All Location 人在空间的相对位置。 4) .Location设置机器
12、 igs格式的三维模型 Cell Browser- HandlingPROS SimPRO Material Handling Workce fl Values锁定机器人在空间位置。(选中后机器人将不可拖动) 6).此外如果想要移动机器人除了通过 Location 设置外,可以单击机器 人出现绿 色的XY座标系如图, 你可以选择任何一个轴进行拖动来移动位置。 3.其他对象的载入 ROBOGUIDE以加载各类实体对象,这些对象可以分成两部分,一部分是 ROBOGUIDE带的模型,另一部分是可以通过其它三维软件导
13、入的igs格式 的模型文件。 具体操作步骤:1)单击菜单栏上的Cell —Add Fixture —CAD Library出现 如图对话框,这里主要加载ROBOGUIDE带的库模型文件,包括各类焊枪,加 工中心,注塑机等。 图13 2)单击菜单栏上的 Cell -Add Fixture -Single CAD File 出现文件浏览对 话框,这里主要加载由其它三维软件如 Solidworks ,CATIA , UG 等所导入的 通过上述两种方法导入的模型同 样可以进行空间位置的调整,具体 方法和机器人的移动方法相同. 4).机器人手爪的载入 --- F矶师 Fixturel 就
14、1 Parts -由 Robot Cortroliers 总 0 C 1 - Robot Controlferf 自「 GR1 -R-20G0iB/165F -1 Tooling y UT.1 EmHJ ? UT: 2 (Eoat2) T UT; 3 (Eoat3) T UT. 4 (Eaat4) ? UT: 5 ]Eoat5) f UT. R而用 t UT: 7 (Eoat?) T UT: e (Eoate) [ UT: 9 [Eoataj ? UT:10 EoaHG) t UT:14 (SGAOUPpg 具体操作步骤: 1) .单击工具栏上的主.show/hide C
15、ell Browser 按钮,出现如图14的对 话框。 2) .在如图14所示在Cell Browser菜单下单击手爪Tooling前的加号可以 出现手爪目录,即UT:1到UT:10 默认可以加载10把工具. 图14 3) .双击UT:1(Eoat1)出现如图15所示的对话 框,在CAD File里单击文件夹浏览,找到手爪模 型所在位置,将它调入. Scale调节模型比例,其中Scale X, Scale Y, Scale Z 是分别调节手爪在 XYZ三方 向下的放大缩小比例。 Mass是输入手爪重量以确定重心。 Q ur:1 (Eofitn, GP: 1-印 165F,刖屋
16、包空二 Feature Frag Settings | Feature P气 口f的 Feature App/Ret | Pds Offsets | Calibration General UTOOL | P^rts | Simulation -UTOOL X 0,000 mm 『Edit UTOOL Y | 0W0 mm — Lhu Current T riad Z 0-000 mm Location w I 0,000 deg P | O.OOD deg R | OlOOO deg - Move Robot Normal-h?-5urFace fCtrkShift
17、-Click) For moving ths robot to a surface ra via ctrl-shtft-click, select the T ool Frame 占痴 that matches the surface normal line 4).单击UTOO叨换到UTOO选项卡下, 这里主要用于编辑TCP点的位置,默认的 TCP点位置位于机器人法兰盘的中心,当装 入手爪后需要重新调整位置,将它放到手 爪上,所以要在对话框中将 TCP点的位置 精确输入,然后单击 Use Current Triad Location 记录下位置信息。 图15 注意:1).通过上述四个
18、步骤就可以将机器人的执行手爪调入仿真环境中, 如果所调入的手爪是ROBOGUIDE带的则会自动将手爪的法兰与机器人的法 兰中心对齐安装到位,如果是通过其它三维软件设计导入的必须保证在用三 维软件设计手爪时原点定在手爪发栏的中心, 否则在仿真环境下很难准确安 装到位,会给仿真带来不便。 2).在做点焊仿真时我们经常需要模拟点焊枪的开枪和闭枪, 在实现这 个功能时必须事先准备两把相同的点焊枪, 通过三维软件将一把枪调成闭合 这样就可以通过单击 Open和Close实现开枪和闭枪功能。 状态,另一把枪调成打开状态,如图所示 a 然后按照之前步骤先调入其中一把 (开枪和
19、闭枪调入的先后顺序无所 谓),调入后单击Simulation选项 卡如图17所示,在Actuated CAD^ 单击文件夹浏览按钮调入第二把枪, Cancef 除了单击Open和Close实现上述功能外也可单击工具栏的 JL按钮实现。 图17 4.机器人DRESS勺添加 图18 1) .如图18所示单击菜单栏上的 Robot选择Restart Controller 下的 Controlled Start ,进入下一个界面如图19。 图19 2) .如图19所示,选择TP上的Menu键,将光标移到 Menu菜单下的9 MAINTENANC学击Enter(回车)进入下
20、一个界面如图20。 AUTO T6flK:h 20DG?2ilDF RsiLe>4 lEEmlaullcr I 5HIFT MFT 图20 3) .在如图20所示的界面下按F4 MANUAL进入下一个界面如图21。 图21 4) .在如图21所示界面下,这里选择1 Cycle Time Priority 选项即可, 然后直接按Enter键进入下一个界面如图22所示。 Ei and□rd Fl an InsuI? td FI args "3n I ij 1 i on Ar m r白占ch ---FLAMI3E TYPE SELECT ---
21、
0 rouip 1 Ini t 131 I za t Ion tt**tt*t ・•*+*#+,++ R-3OQ0>@/21QF ・++■+++•**,•++
* St ME.i.Kit BtiLift Cuei.1 I. Lil lex J : C
22、art Robot Centro llcrl Cent Killed [X | ttt G rOUC 1 I n I 1 i a I I Z a 1: I Gh ttt Krs-rTT r ▼… R-2000IDZ21DF 七 rqgl 上? □t r *uI I v*14+ ■ 123 目 ReiImiI ranlifillM I 口 如图22所示界面下,选择3 Solution Arm ,然后直接按Enter键进入下一 个界面如图23所示。 图23 6) .在如图23示界面下,选择〔Standard Type,然后直接按Enter键进入 下一个界面如图24
23、所示 * lit art in. Robot Canlrolle-ril j; Conte oiled 弓 Rnhil ranlKiIlM I Q nr I - R -jnnDifi/7inF vr en VTir ro u a 1 ini 4 lai I z a 1 I TT *-|-rT-F t S ft-2000l B/2:1DF / TTF 比十 T --PAy I t * t E nrta - Cu r r sn 1 v-a iliJA ♦ 息 1口 [Kg] &n ter Payload (0 2lG[kg| T-mc-K 匚 DOA0 图2
24、4 7) .在如图24界面下,单击ENTER完成设置。系统自动返回初始设置界 面。 mAtjiJAL; T-wch MWj 目 RfiImiI EcnlririllHi I 口 kp I - RQrxiaH/Tinr GrGU[p Rdinn 型.妇黜 KSET FT 「lit art ins Kub at Cuntrnllerl Con.tEt>llc>d... [X | I NTlNW SHF1 图25 8) .在如图25界面下,单击Fctn按钮,选择START (cold),然后直接按 Enter键完成所有设置。结果如图26所示。 图26
25、 5.附加轴的添加 目前我们的机器人大部分是6轴机器人,这里的6轴主要是指机器人本身自 己运动的6轴,但如果需要机器人能额外运动如在导轨上运动等,就需要增 加附加轴。这里具体介绍一下附加轴的添加方法: 1) .单击工具栏上的TOOLTF的Rail Unit Creator Menu ,这个功能主要是 用来添加导轨,但它添加的是硬件部分。 图27 2) .在如图28弹出的Rail Unit Creator 对话框下,可以在TYPEF设置导 轨类型,可以在Cable下设置位置Left或Right ,可以在Length下设置导 轨的长度,可以在NAMEF设置导轨名称。 图
26、28 3) .导轨添加后结果如图29所示. 图29 4) .硬件部分添加完成后,接着添加软件部分,双击机器人弹出如图 30所示 的对话框。单击对话框中的 Serialize Robot 按钮。 llrtnrilinqPRri1 - FvidLi^ilikin = d。窜工 i^fT} - ElHrHlllrH]Pn.n I E*s c*t 加T 3 胃*Hk L?t T好丽眄匕■士 TM J^ndQM f匕 FWndiin/同0 -EwfllUatlw - (Z9 的炉 lefts - HwrmRgpfiiO I Bin ldR: ]>HEh Ti^tf>Aijn /uladt
27、Titoii Wr*fcw □ U 由早V ” *等状值* *灯神白4?国,卜11・土三3之1修第 鼻 %陶/ 而 6 □ 3 0 ft; 1 t 喧苧/修等 x/前后占京近■含23由喘菊 R A G1丰 金的♦•产4f日・B 曦南能中MV -1■ 1 i SmPFlD kEHtwiid H mding Wnkc-dl 曲 Pwta Robot Conwfois 口 工 FVoitas Dirn4rifHFif T*X1方 ・ Kwxfcitf*c - e^jli.. . 1ry谈曲曲稿应乐覆… eh 田 4 Hr>=Lr>qPPO-Evriv... I 0卷度小厘.二 U
28、€ 3PG - IHEl P —年 知43 图30 5). 在图 31所 示界 面中 勾选 Exten ded Axis Contr ol ,添加附加轴软件部分 图31 1).单击MenuW出Menu菜单,在该菜单下选择 2).选择 Extended Axis Control , 成,之后可 行另外设 第 9 个选项 MAINTENANCE. 6) .在添加完软件部分后重新回到工作界面,单击如图 32所示菜单栏上的 Robot 下的 Restart Controller 里的 Controlled Start 重启一下。 图32
29、 7) .完成上述步骤后打开TP,进行相应的设置 并按下F4 MANUA即添加完 以根据现场设备具体参数进 置,这里不做具体说明。 6.工具条常用功能简介 1) .囱匠"揖皆咆卢力烈仍 - Zoom In 3D World 这个按钮是实现工作环境放大作用的 --Zoom Out 这个按钮是实现工作环境缩小作用的 zOo Zoom Window 这个按钮是实现工作环境局部放大作用的 工 Center the View on the Selected Object 这个按钮是让所选对象的中心在屏幕正中间 这五个按钮分别表示俯视图,右视图,左视图,前视图,
30、后视图 View wire-frame 这个按钮表示让所有对象以线框图状态显示 (区别如下) Show/Hide Mouse Commands 单击这个按钮出现如图所示的黑色表格, 这里罗列除了所有的通过鼠标操作 的快捷菜单 2) .湍察/疆丽开二台]祠B A 「Show/Hide Jog Coordinates Quick Bar 这个按钮的主要功能是实现世界坐标系,用户坐标系,工具坐标系等各个坐 标系间的切换。 专 Show/Hide Gen Override Quick Bar 这个按钮的主要功能是控制机器人执行程序时的运动速度 a Open/Close H
31、and 这个按钮的主要功能是控制机器人手爪的开和闭 款 Show/Hide Work Envelope 这个按钮的主要功能是显示机器人的工作范围 S Show/Hide Teach Pendant 这个按钮的主要功能是显示TP控制器进行TP示教 Show/Hide Robot Alarms 这个按钮的主要功能是显示机器人的所有程序报警信息。 6.提高ROBOGUIDE运行速度方法 1) .在程序运行时尽量关掉 Collision Detection ,即关掉碰撞检验,这样 可以大大节约CPUK源和内存。 2) .在导入大型igs格式的模型文件时尽量在三维软件中先做些处理减小
32、文 件大小,可以略去一些对仿真没有影响的部件。 3) .在仿真时尽量关掉不需要的窗口如关掉 Program Teach和Profiler 窗 口能略微提高性能 4) .关掉Collect TCP Trace 可以减小CPU勺占用率。 5) .打开菜单 Tools-Options-General,将 Object Quality(chordal deviation tolerance) 的滑条向右侧(Performance侧)移动多一些,这会使 对象显得粗糙一些,但带来性能提升。 经验小结: 1 .在做点焊仿真时,尽量要保证点焊枪在点焊时枪头垂直于工件表面(允许 在5度范围内微调)
33、,否则会使工件表面产生较多的毛刺。 所以在做点焊 仿真时不要通过拖动TC叼教点来移到工件表面,要通过打命令来移动, 它可以用来保证移动的每一点都是垂直于工件表面的,通过这种方法来移 动不仅快捷而且准确。具体使用方法是先点击工具栏上的 三命令,再点 击工件表面上的焊点,这样机器人就可以直接移动过去,并垂直于工件表 面。不过有时在移动过程中TP示教点显示为红色,表示不可移动产生这 种情况大多是因为机器人接近极限位置,所以不能移。解决方法是先调整 机器人姿态,让它远离极限位置后再移动,这样就行了。 2 .我们每次装入手爪后需要重新调整 TCP点位置,将它放到手爪上,所以要 在对话框中将TCPK
34、的位置精确输入,但是在ROBOGUIDE是无法精确测 出它的具体位置的,同时手爪导入时要保证原点在手爪的法兰中心上, 这 样才可以准确的装配,但实际中经常发生原点不一致的情况这就需要我们 自己调整。所以我们要借助于第三方软件,目前办公室里我们常用的第三 方软件有UG CATIA Solidworks其中CATIA和Solidworks要想变换零 件或装配体的设计原点比较麻烦,这里推荐使用 UG UG是唯一一个可以 随意更改设计原点的软件,由于改变原点对ROBOGUIDE爪装配十分重要 所以这里我详细介绍一下它改变原点的方法: 1) .用UG打开点焊枪模型如图1所示,在图1的视图中可以看
35、到在点焊 枪模型旁有一个XYZ系统坐标系,这里需要注意UGffi其他软件不同它可 以有多个XY座标系,而我们所需要确认的原点坐标系必须是绝对原点坐 标系,否则转换也没有意义 2) .所以我们首先先要确认绝对原点在什么地方,通过单击工具栏上的设 置为绝对WCST令显示绝对原点位置,如图 2所示 图2 3) .接着单击菜单栏上的编辑下的变换命令,如图 3所示 图3 4).在如图4类选择对话框下选择焊枪模型,选择完成后单击确定 图4 5) .在图5的变换对话框下选择平移命令,出现平移对话框 6) . 在图 6 所示的平移对话框下选择焊枪的法兰中心。 图6 7) .在选完法兰中心后在图7的点对话框中输入XY座标都为0,即绝对坐 标系原点,然后点击确定。 图7 8) . 通过上述步骤后出现如图 8 所示的变换对话框,在这个对话框中点击移 动,然后单击确定即可。 图8 9) . 结果如图 9 所示,绝对坐标系已经位于法兰中心 如图 9
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
