 RaLC-Pro教程_第3章要点
RaLC-Pro教程_第3章要点

《RaLC-Pro教程_第3章要点》由会员分享,可在线阅读,更多相关《RaLC-Pro教程_第3章要点(25页珍藏版)》请在装配图网上搜索。
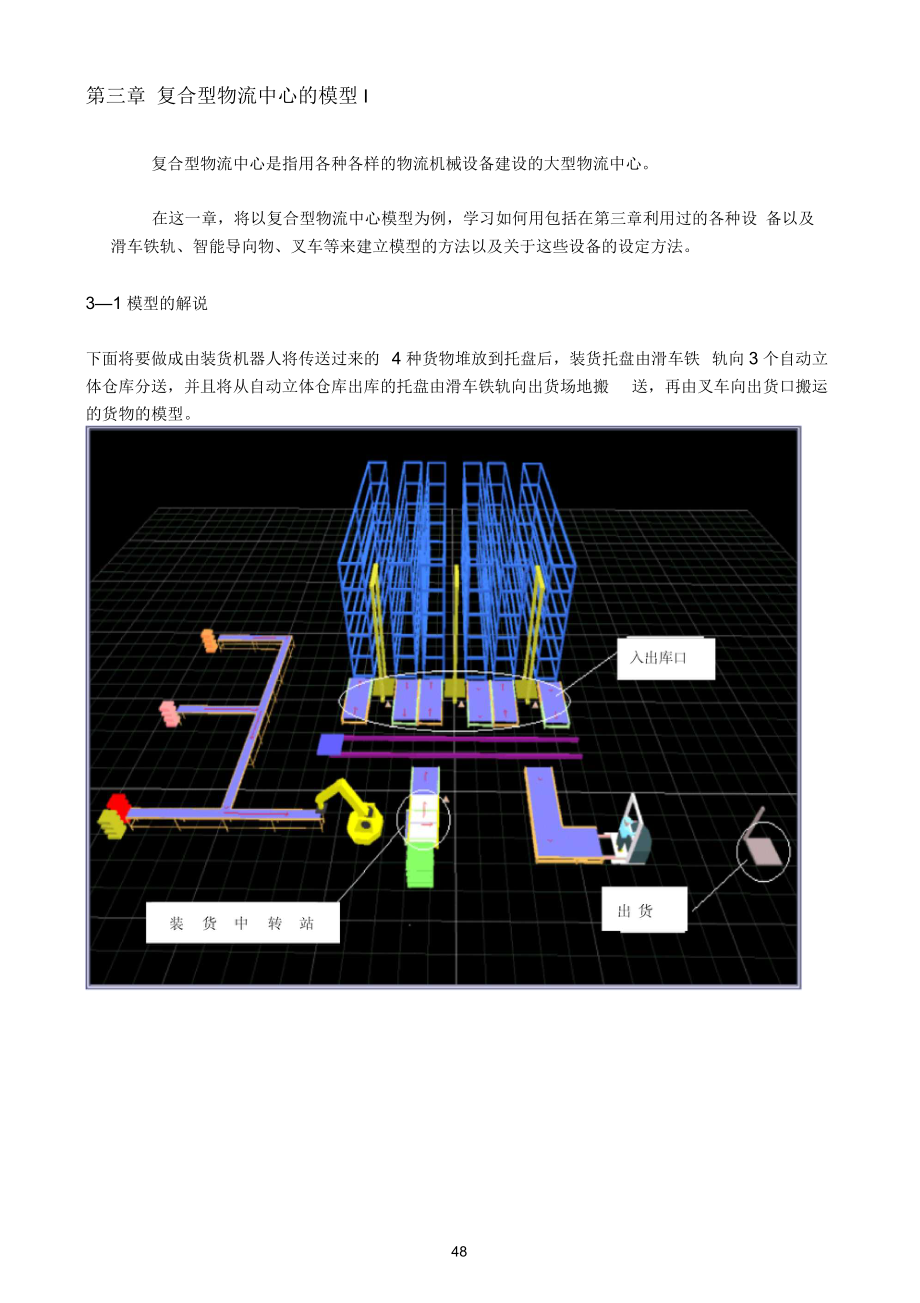
1、第三章 复合型物流中心的模型I复合型物流中心是指用各种各样的物流机械设备建设的大型物流中心。在这一章,将以复合型物流中心模型为例,学习如何用包括在第三章利用过的各种设 备以及滑车铁轨、智能导向物、叉车等来建立模型的方法以及关于这些设备的设定方法。31模型的解说下面将要做成由装货机器人将传送过来的 4种货物堆放到托盘后,装货托盘由滑车铁 轨向3个自动立体仓库分送,并且将从自动立体仓库出库的托盘由滑车铁轨向出货场地搬 送,再由叉车向出货口搬运的货物的模型。3-3建立模型启动RaLC-Pro,将在第三章做成的Lesson2 l.emu模型调出72因为要在自动立体仓库和装货中转站之间设置滑车铁轨和出入
2、库口,所以把自动立体仓库向后移动5nl用Ctrl +。、Ctrl +V在自动立体仓库的两边添加1套自动立体仓库。滑车铁轨的设置点击设备栏的滑车铁轨按钮, 目 使滑车铁轨表示出来 将滑车铁轨设置于装货中转站和自动立体仓库之间的位置上。打开滑车铁轨的属性窗口,将概要属性里的速度改为60这是1分钟行走60m的意思。(初始值为30。)为了能使滑车铁轨对应三个自动立体仓库,需将其主体加长。点击尺寸属性,将主体的长度改为 12000后,点击OK按钮。调整滑车铁轨的位置使其与自动立体仓库对齐滑车铁轨IO部分(INPUT,OUTPU邛设置选择滑车铁轨的弹出菜单中的添加IO部件(InMode),使IO部分(IN
3、PUT, OUTPU用输入口表示出来。托盘通过此IO部分(InMode)滑到滑车铁轨上。为了使朝向相配,选择弹出菜单中的180度旋转,使IO部分旋转180度。点击工 具栏里的可移动子类设备按钮,将IO部分移到装货中转站的输出口附近使其与装货中 转站自动连接上。选择滑车铁轨的弹出菜单中的添加IO部件(OutMode ,使IO部分表示出来 滑车铁轨上的托盘通过此IO部分(OutMode滑到指定的设备。选择弹出菜单中的180度旋转,使IO部分旋转180度。将IO部分移到左侧自动仓库的IO部分(In Mode)的入口处,使其自动连接上选择滑车铁轨的弹出菜单中的添加IO部件(InMode),使IO部分表
4、示出来 将IO部分移到左侧自动立体仓库的IO部分(Out Mode)出口附近,使其自动连接上。这样设置了从滑车铁轨流向自动立体仓库的入口以及从自动立体仓库流向滑车铁轨 的出口。用同样的方法,做成中间的自动立体仓库和右侧的自动立体仓库的入口和出口接着,要做成用于将从3个自动立体仓库出库的托盘搬送到出货传送线的滑车铁轨的出口部分。选择滑车铁轨的弹出菜单中的添加IO部件(OutMode ,使IO部分表示出来。将IO部分设置于当前画面滑车铁轨的右下方。再次点击可移动子类设备按钮,使附件固定智能导向物(滑车铁轨一侧)的设置下面要设置用来指定托盘目的地(滑车铁轨的出口)的智能导向物。点击设备栏的智能导向物
5、按钮,.使智能导向物表示出来。将智能导向物设 置在装货中转站和与装货中转站自动连接着的滑车铁轨的IO部分(In Mode)之间。用弹出菜单的与下一个设备相连使装货中转站向智能导向物,智能导向物向滑车铁轨的IO部分(In Mode)连接上。下面要做成从与装货中转站自动连接着的滑车铁轨的IO部分(In Mode)依次向滑车铁轨的3个IO部分(Out Mode)传送才t盘的3条运作规则。注:因这一例中目的地有3处,所以需要3条规则来完成其运作。因下面的操作要使用与自动立体仓库的IO部分(In Mode)自动连接着的3处滑车铁 轨的IO部分(Out Mode ,即输出口部分)的名字,所以请事先将各个I
6、O部分(输出口部 分)的属性窗口里的名称IOSECTION_*记录下来。注:在设定目的地时,需要输入作为目的地的设备名称。*的部分是被自动分配的,所以每个人做成的模型中*部分都有可能不一致。使智能导向物的弹出菜单中的属性对话框表示出来。将Rule IF属性里的Counter的左侧的确认框打上钩点击Rule Then按钮,在有效的确认框 打上钩。在Counter左侧的的确认框上打上 钩,将0改为1。在目的地左侧的确认框上打上钩,输入刚才记录下来的与左侧自 动仓库的IO部分(In Mode)连接着的滑车铁轨的输出口部分的名称(例为 OUTPUT_ 00030)。这是将第一个传送到与装货中转站连接着
7、的滑车铁轨的IO部分上的托盘送到OUTPUT_00030勺意思。点击智能导向物的属性窗口右侧的登录规则按钮。这时,规则编号的下拉条菜单文 本变成了 Rule1。这成为第1条运作规则。从登录规则按钮上面的规则编号下拉条菜单中选择新建一项。点击Rule IF按钮,在Counter左侧的确认框上打上钩,将0改为1点击Rule Then按钮,在有效的确认框上打上钩。在 Counter左侧的确认框上打上 钩,将1改为2。在目的地左侧的确认框上打上钩,然后输入与中间的自动立体仓 库的IO部分(In Mode旌接着的滑车铁轨的卒&出口部分的名称 (例为OUTPUT_00032)这是将第二个传送到与装货中转站
8、连接着的滑车铁轨的IOSECTION_0003妁意思。IO部分上的托盘送到点击智能导向物的属性窗口画面右侧的登录规则按钮。这时,规则编号的下拉条菜 单变为Rule2。这成为第2条运作规则。从登录规则按钮上面的规则编号下拉条菜单中选择新建一项。点击Rule IF按钮,在Counter左侧的确认框上打上钩,将1改为2。点击Rule Then按钮,在有效的确认框上打上钩。在 Counter左侧的确认框上打上 钩,将2改为0。注:按照前面内容的经验,第3条规则好像应改为3,但要想使从规则1到规则3 循环反复的话,最后的运作规则的 Counter须改为0才行。在目的地左侧的确认框上打上钩,然后输入与右侧
9、自动立体仓库的IO部分(In Mode) 连接着的滑车铁轨的输出口部分的名称(例为OUTPUT_00034)。这是将第三个传送到与装货中转站自动连接着的滑车铁轨的IO部分(In Mode)上的托盘送到IOSECTION_0003奸且回至U Rule1的意思。点击智能导向物的属性窗口画面右侧的登录规则按钮。这时,规则编号的下拉条菜 单变为Rule3。这成为第3条运作规则。点击智能导向物的属性窗口画面下面的 OK按 键,关闭属性窗口。因为有了各个规则的计数(Counter)和对目的地的设定,第一个托盘被送往左侧的自 动立体仓库,第二个被送往中间的自动立体仓库,第三个被送往右侧的自动立体仓库,第四个
10、被送往左侧的自动立体仓库一不断地入库。在本例中,托盘使由左侧依次入库。目的地的顺序是可以改变的。(规则登录的改变可以直接保存。)智能导向物(自动立体仓库一侧)的设置点击设备栏的智能导向物按钮,使智能导向物表示出来。将智能导向物设置在左侧 自动立体仓库的IO部分(Out Mode剂与这个IO部分自动连接着的滑车铁轨的IO部分(In Mode后间。自动仓库相U滑车铁轨T田滑车铁轨IO 部分用各自的弹出菜单的与下一个设备相连使自动立体仓库的IO部分(Out Mode)向智 能导向物,智能导向物向滑车铁轨的IO部分(InMode)连接起来。下面要做成将从左侧自动立体仓库出库的托盘送往画面右下侧位置上的
11、滑车铁轨的IO部分(OutMode的运作规则。使智能导向物的属性窗口表示出来。Rule IF里的内容无需改变,所以保持这个画面的初始值不动。点击Rule Then按钮,在有效的确认框上打上钩。在目的地左侧的确认框上打上钩 后,输入画面右下侧的滑车铁轨的IO部分(Out Mode)的名称(例为IOSECTION_ 00035)。点击智能导向物的属性窗口画面右侧的 登录规则按钮。点击智能导向物的属性窗口画面下面的OK按钮,然后关闭属性窗口画面。同样地, 在中间和右侧的自动立体仓库的IO部分(Out Mode)和滑车铁轨的IO部分(In Mode)之 间设置智能导向物。IT用弹出菜单的与下一个设备相
12、连分别使自动立体仓库的IO部分(Out Mode)向智 能导向物,智能导向物向滑车铁轨的IO部分(In Mode)连接上。从3个自动立体仓库出库的托盘的目的地都是IOSECTION_00035,所以两个智能导向物属性内容与前页的设定相同。滑车铁轨IOSECTION00035请参照前页来做成两个智能导向物的运作规则出货线的作成设备栏的左转传送带按钮,使左转传送带表示出来打开左转传送带的属性窗口,点击尺寸按钮,将第1部分的长度改为2000, 第2部分的长度改为2000,高度改为 300,宽度改为 1200,然后点击OK 按钮。选择左转传送带的弹出菜单中的顺时针旋转90度,移至画面右下侧的滑车铁轨
13、的IO部分(Out Mode)的出口附近使其自动连接上。叉车的表示点击设备栏的作业员按钮,使作UK表示出来 将其设置于左转传送带的出口附近。5000。打开作业员的属性窗口 ,点击尺寸按钮,然后将经路房改为点击色/形按钮,将形状改为叉车后点击OK按钮报要 |尺寸 |要索控制色/建|圉氏 |茎本酿色第2包理状 n n托受叉辛 由保潞状之一定 ,泊,用,助用弹出菜单的与下一个设备相连使左转传送带向叉车连接上。点击设备栏的部件消灭器,将部件消灭器表示出来。将部件消灭器设置在离叉车的 距离相当于其设定的路线长度(例为5m )的位置上。用弹出菜单的与下一个设备相连将叉车连上部件消灭器。用Lesson3l.
14、emu的名称另保存起来。保存好后,点击菜单栏里的|模拟|开始|或者时间栏里的开始按钮,模型则会运转 起来。货物被投放到传送带上,由机器人装好货的托盘通过滑车铁轨送往自动立体仓库储 存起来。要将托盘出库时,选择已经入库的托盘的弹出菜单中的 lOSection出库指示 IOSECTION_*。托盘会被按照 lOSection出库指示|IOSECTION_* 的次序依次送出仓库。 叉车则会将出库的托盘送往部件消灭器。APPENDIX BAPP B- 1自动立体仓库仓位数量的改变自动立体仓库仓位数量可以改变。下面使将左侧自动立体仓库的仓位数改为列15,层10 (初始值为列10,层5)。打开左侧自动立体仓库的属性窗口,点击要素/控制按钮,将列数改为15,层数改为c左侧自动立体仓库的纵长和高度发生了变化,与其它的自动立体仓库相比体积增大 了。APP B 2自动立体仓库速度的改变自动立体仓库的堆垛机移动速度可以被改变。下面使将中间的自动立体仓库的堆垛机速度改为每分钟移动120m。(初始值为42m)打开中间的自动立体仓库的属性窗口,将概要属性里的水平方向速度和垂直方向速度 都改为120后点击OK按钮。请观察一下,与两边的自动立体仓库做比较,中间的堆垛机移动速度较快。
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
