 FANUC Alpha系列伺服电机和伺服放大器结构和维修方法
FANUC Alpha系列伺服电机和伺服放大器结构和维修方法

《FANUC Alpha系列伺服电机和伺服放大器结构和维修方法》由会员分享,可在线阅读,更多相关《FANUC Alpha系列伺服电机和伺服放大器结构和维修方法(9页珍藏版)》请在装配图网上搜索。
1、FANUC Alpha系列伺服电机和伺服放大器结构和维修方法(1)1. FANUC 的交流伺服电机与直流伺服电机相比,交流伺服伺服电机具有免维护,低损耗,体积小的特点,在现代控制领域已经逐步取代了直流伺服电机,交流伺服电机被广泛地应用到各个控制领域,FANUC 从80年代开始逐步使用交流伺服电机,从开发应用到目前被广泛使用的Alpha 系列伺服电机,经过了三代的更新,从模拟的交流控制单元驱动的伺服电机,到S系列电机,从而又发展成为现在使用的交流Alpha 系列伺服电机,从伺服电机的性能上得到了提高,而电机的体积更小,特别是现在使用的Alpha 系列的伺服电机,电机的型号更全,并采用了磁更强的材
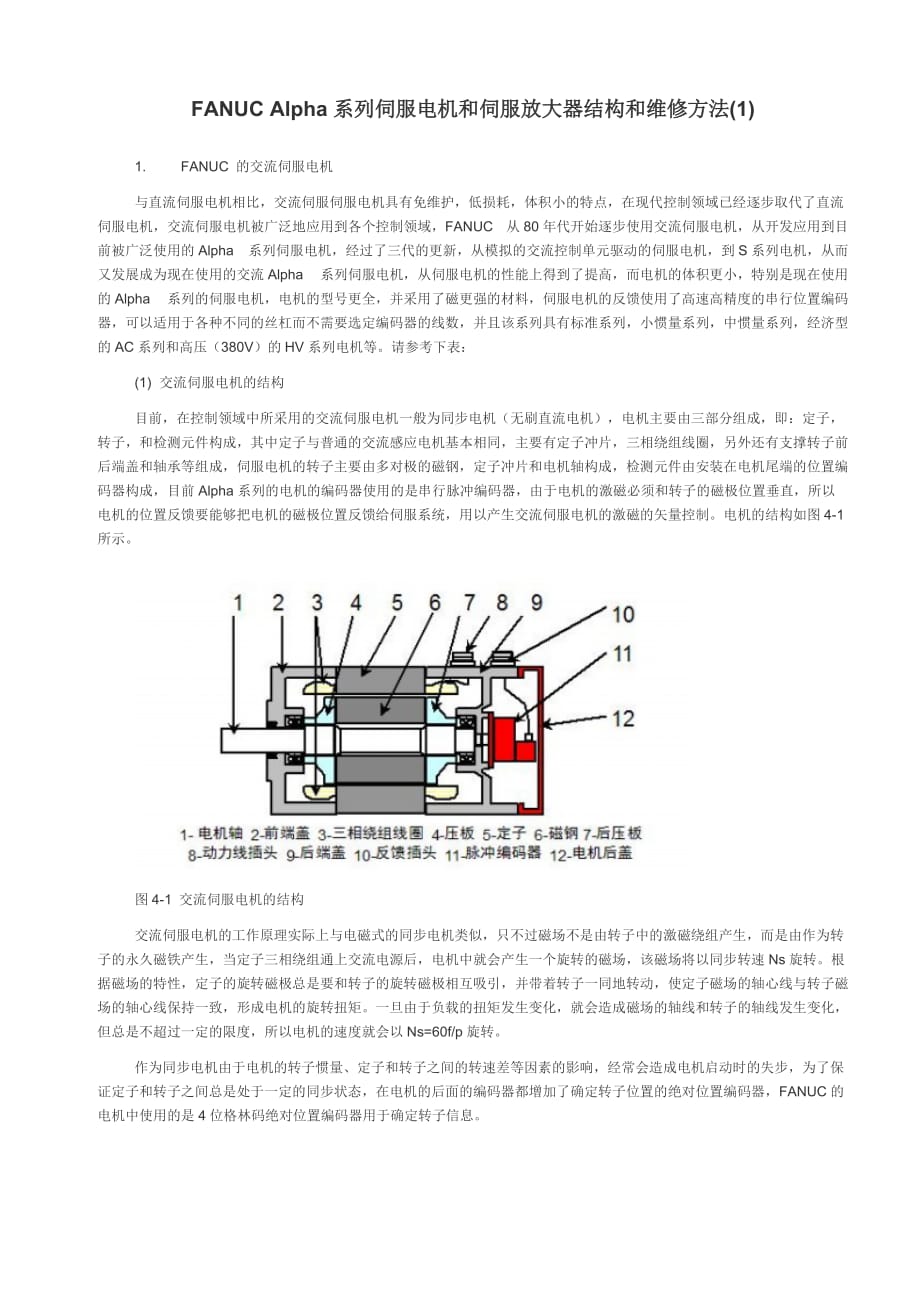
2、料,伺服电机的反馈使用了高速高精度的串行位置编码器,可以适用于各种不同的丝杠而不需要选定编码器的线数,并且该系列具有标准系列,小惯量系列,中惯量系列,经济型的AC系列和高压(380V)的HV系列电机等。请参考下表:(1) 交流伺服电机的结构目前,在控制领域中所采用的交流伺服电机一般为同步电机(无刷直流电机),电机主要由三部分组成,即:定子,转子,和检测元件构成,其中定子与普通的交流感应电机基本相同,主要有定子冲片,三相绕组线圈,另外还有支撑转子前后端盖和轴承等组成,伺服电机的转子主要由多对极的磁钢,定子冲片和电机轴构成,检测元件由安装在电机尾端的位置编码器构成,目前Alpha系列的电机的编码器
3、使用的是串行脉冲编码器,由于电机的激磁必须和转子的磁极位置垂直,所以电机的位置反馈要能够把电机的磁极位置反馈给伺服系统,用以产生交流伺服电机的激磁的矢量控制。电机的结构如图4-1所示。图4-1 交流伺服电机的结构交流伺服电机的工作原理实际上与电磁式的同步电机类似,只不过磁场不是由转子中的激磁绕组产生,而是由作为转子的永久磁铁产生,当定子三相绕组通上交流电源后,电机中就会产生一个旋转的磁场,该磁场将以同步转速Ns旋转。根据磁场的特性,定子的旋转磁极总是要和转子的旋转磁极相互吸引,并带着转子一同地转动,使定子磁场的轴心线与转子磁场的轴心线保持一致,形成电机的旋转扭矩。一旦由于负载的扭矩发生变化,就
4、会造成磁场的轴线和转子的轴线发生变化,但总是不超过一定的限度,所以电机的速度就会以Ns=60f/p旋转。作为同步电机由于电机的转子惯量、定子和转子之间的转速差等因素的影响,经常会造成电机启动时的失步,为了保证定子和转子之间总是处于一定的同步状态,在电机的后面的编码器都增加了确定转子位置的绝对位置编码器,FANUC的电机中使用的是4位格林码绝对位置编码器用于确定转子信息。2. 交流伺服控制的原理要清楚0系统所使用的交流伺服控制系统,就必须要从最基本的交流(模拟)伺服系统的控制原理开始,虽然目前FANUC所应用的都是Alpha系列伺服放大器,伺服的控制已经完全数字化,其伺服控制的结构已经完全软件化
5、了,直接来对其进行分析,比较困难,但是,其基本的结构和原理都源于模拟的交流伺服控制结构,所以,这里我们首先要了解一下模拟的交流伺服系统的控制结构。图4-2位置环控制框图和图4-3速度控制单元控制框图描述了作为伺服控制的主要控制结构。(1) 位置环的控制原理图4-2 位置环控制框图位置控制作为数控系统的主要控制工作之一,决定着系统进行位置控制性能优略,位置环作为伺服控制系统的最外环,以位置指令作为控制对象,在FANUC0系统中,位置环控制系统是在系统内部来完成的,为了提高系统的集成度和可靠性,FANUC采用了大规模集成电路芯片(LSI),每一个控制轴需要1片,该芯片使用先进的加工工艺,大大地降低
6、了芯片的温升。该芯片功能强大,包括了插补器、位置误差计数器、D/A转换器、参考计数器、螺距误差补偿,反间隙补偿、增益计算、脉冲编码器鉴相器、用于感应同步器的鉴相和正弦余弦发生器电路等。在图4-2中,简要地描述了位置控制的基本结构,其中包括了位置控制芯片LSI的部分内容,首先系统的位置指令通过总线给LSI中的插补器,插补器会产生一系列指令脉冲,该指令脉冲经过CMR乘积后输出到位置误差计数器中,而电机反馈的脉冲编码器的脉冲经过方向鉴别电路以后也处理成了一系列脉冲,该脉冲经过检测被乘比乘积后也输出到位置误差计数器中,该位置误差计数器为一双向计数器,该计数器用于积分计算,当指令与反馈的差增大时,该计数
7、器的数值增大,当指令与反馈的差减小时,该计数器的数值减小,计数器的差值与环增益的乘积即为速度环的速度指令,该指令经D/A转换后,作为速度控制单元的速度指令模拟信号(Vcmd)。而实际上位置环的处理中包括了丝杠反间隙和螺距误差补偿信号。在位置控制LSI中也包括了用于栅格回零的参考计数器控制电路,该电路用于确定坐标的机械零点控制。在位置环控制中最关键的部分是误差计数器,该计数器的值会反映系统的指令和电机的运行情况,该值的大小可以通过系统的诊断来观察,诊断的号码为DGN 800 (X)、DGN801(Y)、DGN802(Z)、DNG803(4),因为该计数器的输出为速度环的指令,所以该值决定了电机的
8、速度。伺服环增益:PRM 517 0.01/SecDMR:PRM 004007除了位置控制的电路以外,PRDY伺服准备信号、VRDY伺服准备完成信号和ENBL用于系统监测和控制速度控制单元的状态,当系统的电源打开后,系统在伺服的初始化过程中,会发出PRDY信号,速度控制单元如工作正常则会发回一个VRDY信号,作为速度单元工作正常的回答,系统则进入正常工作状态。一旦没有接收到VRDY信号,则系统酒会发生ALM#401报警,详见图4-3所示。图4-3 伺服准备的时序(2) 交流速度控制单元(模拟)交流速度控制单元包括了伺服控制的电流环和速度环的双环控制系统,它将位置环发出的Vcmd指令经过运算和放
9、大后,驱动三相变频桥组产生与电机转子相对应的交流旋转磁场,该旋转是电机的转子产生旋转扭矩。图4-4 描述了速度控制单元的基本结构。图4-3 速度控制单元控制框图在图4-3的框图中,可以大致分为两部分,其中上边为速度单元的控制部分,下部分为速度控制单元的动力变频部分,在控制部分中主要是由速度误差放大器、R/S相的电流指令发生电路、三相R/S/T电流环的调节器电路、PWM脉宽调制电路、三极管的各相的隔离却动电路以及编码器鉴相电路和三角波发生器电路组成。控制部分中,速度指令Vcmd和速度反馈信号TSA都输入到误差放大器当中,经过误差放大器的补偿后作为控制电机的电流(扭矩)指令,由于交流伺服电机要根据
10、转子的位置产生交流的旋转磁场,所以转子位置检测电路根据位置编码器来的信号C1C8和PCA和PCB而产生的R/T相的电流指令,该电流指令再和电机的动力线的R/T相电流相减后输送到电流环的调节器(电流指令)中,该部分即输出了三相的电流指令,该指令经过三角波调制后产生了用于驱动六个三极管的PWM脉冲信号,该信号再经过隔离后用于驱动(A-F)。动力变频部分为功率的主回路,该部分主要由交流整流回路,变频回路和保护回路组成,整流回路将三相交流电源整流成直流电源,变频回路利用驱动信号PWMAF将直流电源变换成交流电源用于驱动交流电机。其中还有用于速度控制单元与系统之间的PRDY、ENBL和VRDY信号,从框
11、图中可以清楚地看到PRDY信号控制MCC的工作过程。FANUC伺服系统维修技术经验总结及FANUC伺服电机维修方法22数字式交流伺服驱动单元的故障检测与维修(1)驱动器上的状态指示灯报警 FANUC S系列数字式交流伺服驱动器,设有11个状态及报警指示灯,指示灯的状态以及含义见表5-8。以上状态指示灯中,HC、HV、OVC、TG、DC、LV的含义与模拟式交流速度控制单元相同,主回路结构与原理亦与模拟式速度控制单元相同,不再赘述。表5-8中,OH、OFAL、FBL为S系列伺服增添的报警指示灯,其含义如下。表5-8 FANUCS系列驱动器状态指示灯一览表代 号含 义备 注代 号含 义备注PRDY位
12、置控制准备好绿色DC直流母线过电压报警红色VRDY速度控制单元准备好绿色LV驱动器欠电压报警红色HC驱动器过电流报警红色OH速度控制单元过热HV驱动器过电压报警红色OFAL数字伺服存储器溢出OVC驱动器过载报警红色FBAL脉冲编码器连接出错TG电动机转速太高红色1)OH报警。OH为速度控制单元过热报警,发生这个报警的可能原因有:印制电路板上S1设定不正确。伺服单元过热。散热片上热动开关动作,在驱动器无硬件损坏或不良时,可通过改变切削条件或负载,排除报警。再生放电单元过热。可能是Q1不良,当驱动器无硬件不良时,可通过改变加减速频率,减轻负荷,排除报警。电源变压器过热。当变压器及温度检测开关正常时
13、,可通过改变切削条件,减轻负荷,排除报警,或更换变压器。电柜散热器的过热开关动作,原因是电柜过热。若在室温下开关仍动作,则需要更换温度检测开关。2)OFAL报警。数字伺服参数设定错误,这时需改变数字伺服的有关参数的设定。对于FANUC 0系统,相关参数是8100,8101,8121,8122,8123以及81538157等;对于10/11/12/15系统,相关参数为1804,1806,1875,1876,1879,1891以及18651869等。3)FBAL报警。FBAL是脉冲编码器连接出错报警,出现报警的原因通常有以下几种:编码器电缆连接不良或脉冲编码器本身不良。外部位置检测器信号出错。速度
14、控制单元的检测回路不良。电动机与机械间的间隙太大。(2)伺服驱动器上的7段数码管报警 FANUC C系列、/i系列数字式交流伺服驱动器通常无状态指示灯显示,驱动器的报警是通过驱动器上的7段数码管进行显示的。根据7段数码管的不同状态显示,可以指示驱动器报警的原因。FANUC C系列、电源与驱动器一体化结构型式(SVU型)的/i系列交流伺服驱动器的数码管状态以及含义见表5-9。表5-9 FANUC C/i系列(SVU型)7段数码管状态一览表数码管显示含 义备 注速度控制单元未准备好开机时显示0速度控制单元准备好1速度控制单元过电压报警同HV报警2速度控制单元欠电压报警同LV报警3直流母线欠电压报警
15、主回路断路器跳闸4再生制动回路报警瞬间放电能量超过,或再生制动单元不良或不合适5直流母线过电压报警平均放电能量超过,或伺服变压器过热、过热检测元器件损坏6动力制动回路报警动力制动继电器触点短路8L轴电动机过电流第一轴速度控制单元用9M轴电动机过电流第二轴速度控制单元用bL/M轴电动机过电流8L轴的IPM模块过热、过流、控制电压低第一轴速度控制单元用9M轴的IPM模块过热、过流、控制电压低第二轴速度控制单元用bL/M轴的IPM模块过热、过流、控制电压低采用公用电源模块结构型式(SVM型)的FANUC/i系列数字式交流伺服驱动器,数码管状态以及含义见表5-10;有关电源模块的状态显示及故障诊断详见
16、本书第7章第7.2.4表5-10 FANUC/i系列(SVM型)7段数码管状态一览表数码管显示含 义备 注速度控制单元未准备好0速度控制单元准备好1风机单元报警2速度控制单元+5V欠电压报警5直流母线欠电压报警主回路断路器跳闸81轴电动机过电流一轴或二、三轴单元的第一轴9M轴电动机过电流二、三轴单元的第二轴AN轴电动机过电流二、三轴单元的第三轴bL/M轴电动机同时过电流CM/N轴电动机同时过电流dL/N轴电动机同时过电流EL/M/N轴电动机同时过电流8L轴的IPM模块过热、过流、控制电压低一轴或二、三轴单元的第一轴9M轴的IPM模块过热、过流、控制电压低二、三轴单元的第二轴AN轴的IPM模块过
17、热、过流、控制电压低二、三轴单元的第三轴bL/M轴的IPM模块同时过热、过流、控制电压低CM/N轴的IPM模块同时过热、过流、控制电压低dL/N轴的IPM模块同时过热、过流、控制电压低EL/M/N轴的IPM模块同时过热、过流、控制电压低FANUC 系列数字式交流速度控制单元,带有POWER、READY、ALM 3个状态指示灯与7段数码管状态显示,指示灯与数码管的含义见表5-11。(3)系统CRT上有报警的故障1)FANUC-0系统的报警。FANUC数字伺服出现故障时,通常情况下系统CRT上可以显示相应的报警号,对于大部分报警,其含义与模拟伺服相同;少数报警有所区别,这些报警主要有:4N4报警:
18、报警号中的N代表轴号(如:1代表X轴:2代表Y轴等,下同),报警的含义是表示数字伺服系统出现异常,详细内容可以通过检查诊断参数;诊断参数的意义见本书第5.2.3节。表5-11 FANUC系列7段数码管状态一览表POWER灯READY灯ALM灯数码管显示含 义备 注O速度控制单元未准备好开机时显示OO速度控制单元准备好OY速度控制单元过电压报警同HV报警OP直流母线欠电压报警主回路熔断器跳闸OJ再生制动回路过热报警瞬间放电能量超过,或再生制动单元不良或不合适Oo过热报警速度控制单元过热OC风扇故障报警Oc过电流报警主回路过流4N6报警:表示位置检测连接故障,可以通过诊断参数作进一步检查、判断,参
19、见本章第5.2.3节。4N7报警:表示伺服参数设定不正确,可能的原因有:a)电动机型号参数(FANUC 0为8N20、FANUCll/15为1874)设定错误。b)电动机的转向参数(FANUC 0为8N22、FANUCll/15为1879)设定错误。c)速度反馈脉冲参数(FANUC 0为8N23、FANUCll/15为1876)设定错误。d)位置反馈脉冲参数(FANUC 0为8N24、FANUCll/15为1891)设定错误。e)位置反馈脉冲分辨率(FANUC 0为037bit7、FANUCll/15为1804)设定错误。940报警:它表示系统主板或驱动器控制板故障。2)FANUCl0/11/
20、12/15系统的报警。当使用数字伺服时,在FANUC l0/11/12及FANUC15上可以显示相应的报警。这些报警中,SV000SVl00号报警的含义与前述的模拟伺服基本相同,不再赘述。对于数字伺服的特殊报警主要有以下几个。SVl01报警:绝对编码器数据出错报警。可能的原因是绝对编码器不良或机床位置不正确。SVll0报警:串行编码器报警(串行A)。可能的原因是串行编码器不良或连接电缆不良,具体内容可以参见/系列伺服驱动器报警说明。SVlll报警:串行编码器报警(串行C),原因同上。SVll4报警:串行编码器数据出错。SVll5报警:串行编码器通信出错。SVll6报警:驱动器主接触器(MCC)
21、不良。SVll7报警:数字伺服电流转换错误。SVll8报警:数字伺服检测到异常负载。3)FANUCl6/18系统的报警。在FANUCl6/18系统中,当伺服驱动器出现报警时,CNC亦可显示相应的报警信息,这些信息包括:ALM400报警:伺服驱动器过载,可以通过诊断参数DGN201进一步分析,有关DGN201的说明见后述。ALM401报警:伺服驱动器未准备好,DRDY信号为“0”。ALM404报警:伺服驱动器准备好信号DRDY出错,原因是驱动器主接触器接通(MCON)未发出,但驱动器DRDY信号已为“1”。ALM405报警:回参考点报警。ALM407报警:位置误差超过设定值。ALM409报警:驱
22、动器检测到异常负载。ALM410报警:坐标轴停止时,位置跟随误差超过设定值。ALM411报警:坐标轴运动时,位置跟随误差超过设定值。ALM413报警:数字伺服计数器溢出。ALM414报警:数字伺服报警,详细内容可以参见诊断参数DGN200204的说明。ALM415报警:数字伺服的速度指令超过了极限值(511875P/s),可能的原因是机床参数CMR设定错误。ALM416报警:编码器连接出错报警,详细内容可参见诊断参数DGN201的说明。ALM417报警:数字伺服参数设定错误报警,相关的参数有:PRM2020/2022/2023/2024/2084/2085/1023等。ALM420报警:同步控
23、制出错。ALM421报警:采用双位置环控制时,位置误差超过。在系统使用绝对编码器时,报警还包括以下内容:ALM300报警:坐标轴需要手动回参考点操作。ALM301报警:绝对编码器通信出错。ALM302报警:绝对编码器数据转换出现超时报警。ALM303报警:绝对编码器数据格式出错。ALM304报警:绝对编码器数据奇偶校验出错。ALM305报警:绝对编码器输入脉冲错误。ALM306报警:绝对编码器电池电压不足,引起数据丢失。ALM307报警:绝对编码器电池电压到达更换值。ALM308报警:绝对编码器电池报警。ALM308报警:绝对编码器回参考点不能进行。在系统使用串行编码器时,串行编码器报警内容如
24、下:ALM350报警:串行编码器故障,具体内容可以通过诊断参数DGN202/204检查。ALM351报警:串行编码器通信出错,具体内容可以通过诊断参数DGN203检查。3交流伺服电动机的维修(1)交流伺服电动机的基本检查 原则上说,交流伺服电动机可以不需要维修,因为它没有易损件。但由于交流伺服电动机内含有精密检测器,因此,当发生碰撞、冲击时可能会引起故障,维修时应对电动机作如下检查:1)是否受到任何机械损伤?2)旋转部分是否可用手正常转动?3)带制动器的电动机,制动器是否正常?4)是否有任何松动螺钉或间隙?5)是否安装在潮湿、温度变化剧烈和有灰尘的地方?等等。(2)交流伺服电动机的安装注意点
25、维修完成后,安装伺服电动机要注意以下几点:1)由于伺服电动机防水结构不是很严密,如果切削液、润滑油等渗入内部,会引起绝缘性能降低或绕组短路,因此,应注意电动机尽可能避免切削液的飞溅。2)当伺服电动机安装在齿轮箱上时,加注润滑油时应注意齿轮箱的润滑油油面高度必须低于伺服的输出轴,防止润滑油渗入电动机内部。3)固定伺服电动机联轴器、齿轮、同步带等连接件时,在任何情况下,作用在电动机上的力不能超过电动机容许的径向、轴向负载(见表5-12)。表5-12 交流伺服电动机容许的径向、轴向负载电机形式容许的径向负载电机形式容许的径向负载10,2025kg10,20,30,30R450kg0, 575kg4)
26、按说明书规定,对伺服电动机和控制电路之间进行正确的连接(见机床连接图)。连接中的错误,可能引起电动机的失控或振荡,也可能使电动机或机械件损坏。当完成接线后,在通电之前,必须进行电源线和电动机壳体之间的绝缘测量,测量用500兆欧表进行:然后,再用万能表检查信号线和电动机壳体之间的绝缘。注意:不能用兆殴表测量脉冲编码器输入信号的绝缘。(3)脉冲编码器的更换 如交流伺服电动机的脉冲编码器不良,就应更换脉冲编码器。更换编码器应按规定步骤进行,以FANUC S系列伺服电动机为例,编码器在交流伺服电动机中的安装如图5-16所示,更换步骤如下:1电枢线插座 2连接轴 3转子 4外壳 5绕组 6后盖联接螺钉
27、7安装座8安装座联接螺钉 9编码器固定螺钉 10编码器联接螺钉 11后盖 12橡胶盖13编码器轴 14编码器电缆 15编码器插座图5-16 伺服电动机结构示意图1)松开后盖联接螺钉6,取下后盖11。2)取出橡胶盖12。3)取出编码器联接螺钉10,脱开编码器和电动机轴之间的联接。4)松开编码器固定螺钉9,取下编码器。注意:由于实际编码器和电动机轴之间是锥度啮合,联接较紧,取编码器时应使用专门的工具,小心取下。5)松开安装座的联接螺钉8,取下安装座7。编码器维修完成后,再根据图5-16重新安装上安装座7, 并固定编码器联接螺钉10,使编码器和电动机轴啮合。为了保证编码器的安装位置的正确,在编码器安
28、装完成后,应对转子的位置进行调整,方法如下:1)将电动机电枢线的V、W相(电枢插头的B、C脚)相连。2)将U相(电枢插头的A脚)和直流调压器的“+”端相联,V、W和直流调压器的“”端相联(见图5-17a),编码器加X+5V电源(编码器插头的J、N脚间)。3)通过调压器对电动机电枢加入励磁电流。这时,因为Iu=IV+IW。,且Iv=Iw,事实上相当于使电动机工作在图5-17b所示的90位置,因此伺服电动机(永磁式)将自动转到U相的位置进行定位。注意:加入的励磁电流不可以太大,只要保证电动机能进行定位即可(实际维修时调整在35A)。4)在电动机完成U相定位后,旋转编码器,使编码器的转子位置检测信号C1、C2、C4、C8(编码器插头的C、P、L、M脚)同时为“1”,使转子位置检测信号和电动机实际位置一致。5)安装编码器固定螺钉,装上后盖,完成电动机维修。图5-17 转子位置调整示意图
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
