 机械原理课程设计牛头刨床凸轮机构.doc
机械原理课程设计牛头刨床凸轮机构.doc

《机械原理课程设计牛头刨床凸轮机构.doc》由会员分享,可在线阅读,更多相关《机械原理课程设计牛头刨床凸轮机构.doc(16页珍藏版)》请在装配图网上搜索。
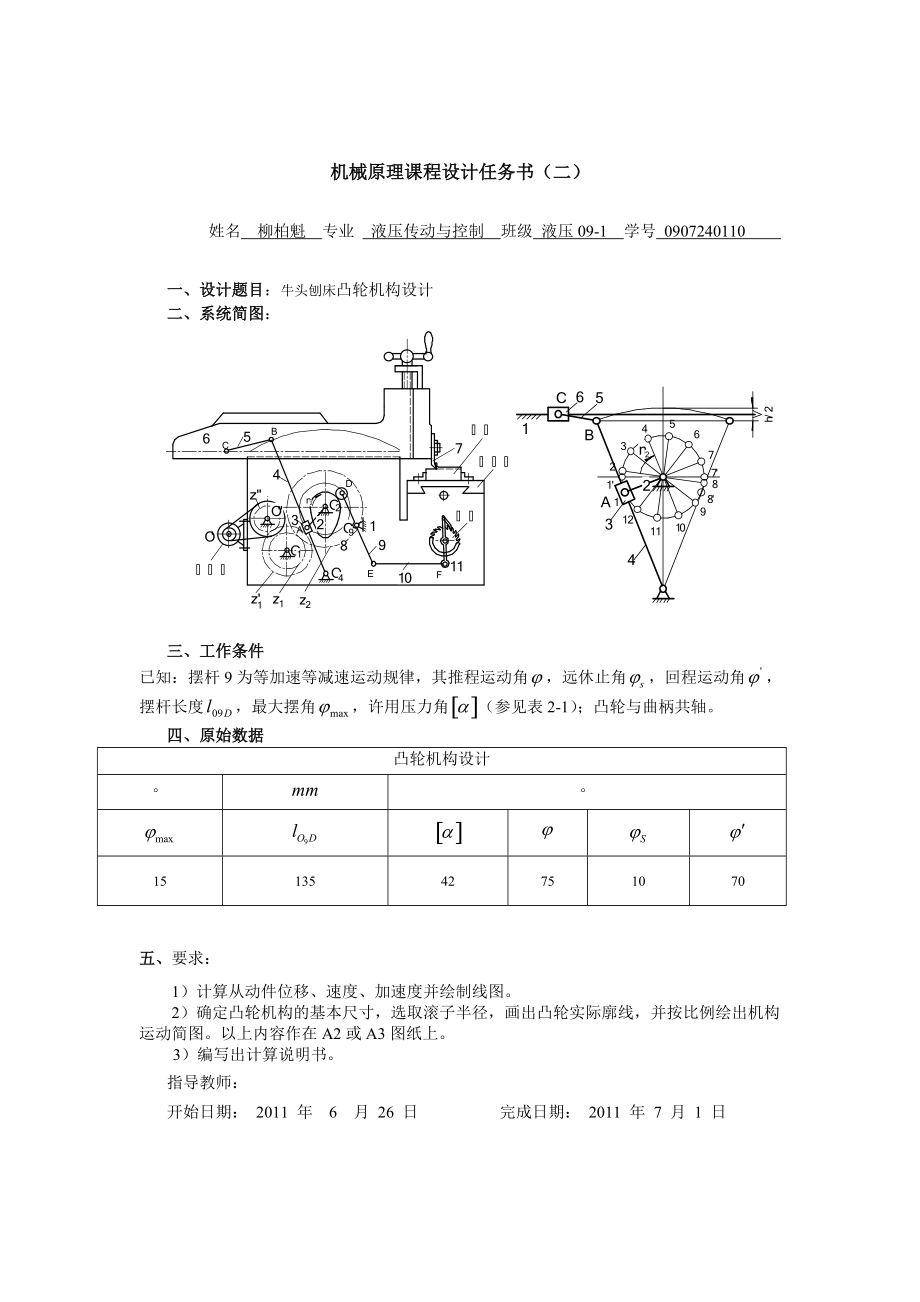
1、机械原理课程设计任务书(二)姓名 柳柏魁 专业 液压传动与控制 班级 液压09-1 学号 0907240110 一、设计题目:牛头刨床凸轮机构设计二、系统简图:三、工作条件已知:摆杆9为等加速等减速运动规律,其推程运动角,远休止角,回程运动角,摆杆长度,最大摆角,许用压力角(参见表2-1);凸轮与曲柄共轴。四、原始数据凸轮机构设计1513542751070五、要求:1)计算从动件位移、速度、加速度并绘制线图。 2)确定凸轮机构的基本尺寸,选取滚子半径,画出凸轮实际廓线,并按比例绘出机构运动简图。以上内容作在A2或A3图纸上。3)编写出计算说明书。指导教师:开始日期: 2011 年 6 月 26
2、 日 完成日期: 2011 年 7 月 1 日目 录 1 设计任务及要求-2 数学模型的建立-3 程序框图-4 程序清单及运行结果-5 设计总结-6 参考文献 -1设计任务与要求已知摆杆9为等加速等减速运动规律,其推程运动角=75,远休止角s=10,回程运动角=70,摆杆长度l09D=135,最大摆角max=15,许用压力角=42,凸轮与曲线共轴。要求:(1) 计算从动件位移、速度、加速度并绘制线图(用方格纸绘制),也可做动态显示。(2) 确定凸轮的基本尺寸,选取滚子半径,画出凸轮的实际廓线,并按比例绘出机构运动简图。(3) 编写计算说明书。2数学模型(1) 推程等加速区当时 (角位移) (角
3、速度)(角加速度)(2) 推程等减速区当时 (角位移) (角速度) (角加速度)(3) 远休止区当时 (角位移) (角速度)(角加速度)(4) 回程等加速区当时 (角位移)(角速度)(角加速度)(5) 回程等减速区当时 (角位移)(角速度) (角加速度)(6) 近休止区(角位移) (角速度)(角加速度)一、如图选取xOy坐标系,B1点为凸轮轮廓线起始点。开始时推杆轮子中心处于B1点处,当凸轮转过角度时,摆动推杆角位移为,由反转法作图可看出,此时滚子中心应处于B点,其直角坐标为:因为实际轮廓线与理论轮廓线为等距离,即法向距离处处相等,都为滚半径rT.故将理论廓线上的点沿其法向向内测移动距离rT即
4、得实际廓线上的点B(x1,y1).由高等数学知,理论廓线B点处法线nn的斜率应为 根据上式有: 可得 实际轮廓线上对应的点B(x,y)的坐标为此即为凸轮工作的实际廓线方程,式中“-”用于内等距线,“+”于外等距线。3程序框图输出数据,结束程序调用子函数,画线图画坐标系清屏画摆杆磙子圆心坐标值清屏调用子函数,画圆心及实际包络线轨迹调用子函数1,对凸轮分段符合判断压力角,曲率半径理论廓线曲率半径取压力角调用子函数1,带出数值初始角判断中心距范围输入:远休止,近休止,摆长定义主函数开始 程序清单及运行结果4程序清单及运行结果#include#include#include#include#inclu
5、de#define l 135.0#define Aa 42#define r_b 40#define rr 8#define K (3.1415926/180)#define dt 0.25float Q_max,Q_t,Q_s,Q_h;float Q_a;double L,pr;float e1500,f1500,g1500;void Cal(float Q,double Q_Q3)Q_max=15,Q_t=75,Q_s=10,Q_h=70;if(Q=0&QQ_t/2&QQ_t&QQ_t+Q_s&QQ_t+Q_s+Q_h/2&QQ_t+Q_s+Q_h&Q=360) Q_Q0=K*0; Q_
6、Q1=0; Q_Q2=0;void Draw(float Q_m) float tt,x,y,x1,y1,x2,y2,x3,y3,x4,y4,dx,dy;double QQ3;circle(240,240,3);circle(240+L*sin(50*K)+4*cos(240*K),240+L*cos(50*K)-4*sin(240*K),3);moveto(240,240);lineto(240+20*cos(240*K),240-20*sin(240*K);lineto(260+20*cos(240*K),240-20*sin(240*K);lineto(240,240);moveto(2
7、40+L*sin(50*K)+4*cos(240*K),240+L*cos(50*K)-4*sin(240*K);lineto(240+L*sin(50*K)+20*cos(240*K),240+L*cos(50*K)-20*sin(240*K);lineto(255+L*sin(50*K)+20*cos(240*K),240+L*cos(50*K)-20*sin(240*K);lineto(240+L*sin(50*K)+4*cos(240*K),240+L*cos(50*K)-4*sin(240*K);for(tt=0;tt=720;tt=tt+2) Cal(tt,QQ); x1=L*co
8、s(tt*K)-l*cos(Q_a+QQ0-tt*K); y1=l*sin(Q_a+QQ0-tt*K)+L*sin(tt*K); x2=x1*cos(Q_m*K+40*K)+y1*sin(Q_m*K+40*K); y2=-x1*sin(Q_m*K+40*K)+y1*cos(Q_m*K+40*K); putpixel(x2+240,240-y2,2); dx=(QQ1-1)*l*sin(Q_a+QQ0-tt*K)-L*sin(tt*K); dy=(QQ1-1)*l*cos(Q_a+QQ0-tt*K)+L*cos(tt*K); x3=x1-rr*dy/sqrt(dx*dx+dy*dy); y3=y
9、1+rr*dx/sqrt(dx*dx+dy*dy); x4=x3*cos(Q_m*K+40*K)+y3*sin(Q_m*K+40*K); y4=-x3*sin(Q_m*K+40*K)+y3*cos(Q_m*K+40*K); putpixel(x4+240,240-y4,YELLOW);void Curvel() int t; float y1,y2,y3,a=0;for(t=0;t=0)&(aQ_t/2)&(aQ_t)&(aQ_t+Q_s)&(aQ_t+Q_s+Q_h/2)&(aQ_t+Q_s+Q_h)&(a360;)t-=360;if(flag=1)for(L=l-r_b+70;Ll+r_b
10、;L+=2) Q_a=acos(L*L+l*l-r_b*r_b)/(2.0*L*l); Cal(t,QQ1); aa=atan(l*(1-QQ11-L*cos(Q_a-QQ10)/(L*sin(Q_a+QQ10);/*压力角*/pr=(pow(L*L+l*l*(1+QQ11)*(1+QQ11)-2.0*L*l*(1+QQ11*cos(Q_a+QQ10),3.0/2)/*曲率半径*/(1+QQ11)*(2+QQ11)*L*l*cos(Q_a+QQ10)+QQ12*L*l*sin(Q_a+QQ10)-L*L-l*l*pow(1+QQ11),3);if(aarr)flag=0;break;if(fl
11、ag=0)Cal(t,QQ1);Draw(t);cleardevice();x_1=240+L*sin(50*K)-l*cos(Q_a+QQ10+40*K);y_1=240+L*cos(50*K)-l*sin(Q_a+QQ10+40*K);circle(x_1,y_1,rr);line(240+L*sin(50*K),240+L*cos(50*K),x_1,y_1);moveto(240+L*sin(50*K),240+L*cos(50*K);lineto(240+L*sin(50*K)+l*cos(Q_a+QQ10+40*K),480+2*L*cos(50*K)-y_1);lineto(14
12、0+L+l*cos(Q_a+QQ10)*2,480+2*L*cos(50*K)-y_1);delay(1);getch();cleardevice();line(100,80,100,445);line(70,300,530,300);line(100,80,98,90);line(100,80,102,90);line(520,298,530,300);line(520,302,530,300);setcolor(2);outtextxy(300,150,The analysis of the worm gears movement);printf(nnnnn Q(w,a);printf(n
13、nnnnnnnnnnnnnttttttttt);Curvel();getch();printf(nnnnnnnnnn);for(i=0;i=1440;i=i+20) delay(1000); printf(%d %f %f %fn,i/4,ei,fi,gi); fprintf(f1,%d %f %f %fn,i/4,ei,fi,gi);getch();fclose(f1);closegraph();运行结果 角度 10倍角位移 104.8倍角速度 108.5倍角加速度0 0.000000 0.000000 64.2189875 1.333333 14.683043 64.21898710 5.
14、333333 29.366087 64.21898715 12.000000 44.049033 64.21898720 21.333334 58.732174 64.21898725 33.333332 73.415222 64.21898730 48.000000 88.098267 64.21898735 65.333336 102.781303 64.21898740 84.666664 102.781303 64.21898745 102.000000 88.098267 -64.21898750 116.666664 73.415222 -64.21898755 128.66667
15、2 58.732174 -64.21898760 138.000000 44.049133 -64.21898765 144.666672 29.366087 -64.21898770 148.666672 14.683043 -64.21898775 150.000000 0.000000 -64.21898780 150.000000 0.000000 0.00000085 150.000000 0.000000 0.00000090 148.469391 -16.855536 -73.72077995 143.877548 -33.711071 -73.72077995 143.8775
16、48 -33.711071 -73.720779100 136.224487 -50.566605 -73.720779105 125.510201 -67.422124 -73.720779110 111.734695 -84.277672 -73.720779115 94.897957 -101.133209 -73.720779120 75.000000 -117.988747 -73.720779125 55.102039 -101.133209 73.720779130 38.256305 -84.277672 73.720779135 24.489796 -67.422142 73
17、.720779140 13.775510 -50.566605 73.720779145 6.122449 -33.711071 73.720779150 1.530612 -16.855536 73.720779155 0.000000 -0.000000 73.720779160-360 0.00000000 0.0000000 0.00000005设计总结通常此次繁忙的机械原理课程设计,让我受益颇多。首先我对牛头刨床凸轮机构的运动有了更深入的了解,用解析法设计凸轮轮廓曲线,用数学建模的方法研究凸轮机构在推程,远休止,回程和近休止各个运动阶段的运动特征和运动规律 建立轮廓上点的坐标与凸轮转
18、角之间的对应关系。其次在设计凸轮机构中,我学习到了许多C语言知识例如用于画图的许多函数,并且充分认识到C语言程序的机械设计中的重要作用,用程序进行运动状态的分析可以为我们的设计提供相当好的辅助,也是我们设计的关键环节,直接决定了我们设计的机构的可行性,促使我要更好的掌握C语言,提升自己的各方面能力。最后,在课程设计过程中,我发现了自己的不足之处和扎实基础知识的重要性,也考验了我将理论转化为实际的能力和综合分析能力,让我对未来有了明确的努力方向,激励我完善我的各方面能力。我同时也得到了许多同学和老师的帮助,让我深刻的体会到团结协作的重要性,每个人都有自己精通的方面,在合作过程中可以使我们自己的能力和知识得到提高,顺利完成课程设计的任务。6参考文献1机械原理孙恒,陈作模,葛文杰,高等教育出版社,2006.52机械原理课程设计,辽宁工程技术大学机械设计基础教研室2011.63C程序设计谭浩强, 清华大学出版社 1995.34计算机图形学罗笑南,王若梅,中山大学出版社,1996.105C语言典型零件CAD王占勇,东北大学出版社,2000.9
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
