 控制系统的状态空间表达式
控制系统的状态空间表达式

《控制系统的状态空间表达式》由会员分享,可在线阅读,更多相关《控制系统的状态空间表达式(38页珍藏版)》请在装配图网上搜索。
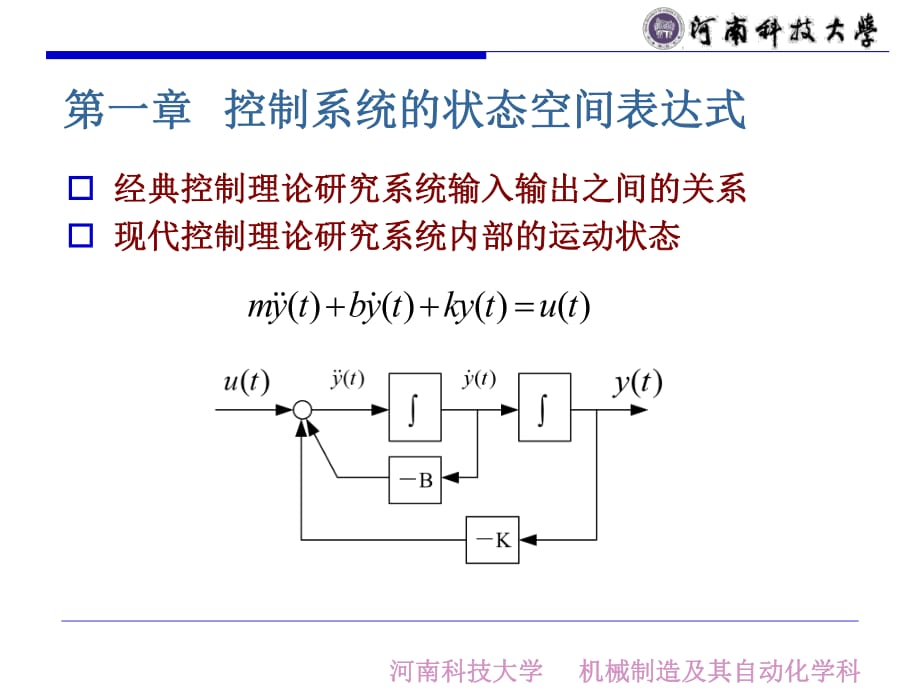
1、河 南 科 技 大 学 机 械 制 造 及 其 自 动 化 学 科 第 一 章 控 制 系 统 的 状 态 空 间 表 达 式o 经 典 控 制 理 论 研 究 系 统 输 入 输 出 之 间 的 关 系o 现 代 控 制 理 论 研 究 系 统 内 部 的 运 动 状 态( ) ( ) ( ) ( )my t by t ky t u t 河 南 科 技 大 学 机 械 制 造 及 其 自 动 化 学 科 1.1 状 态 变 量 及 状 态 空 间 表 达 式o 状 态 变 量 足 以 完 全 表 征 系 统 运 动 状 态 的 最 小 个 数 的 一 组 变 量 n阶 微 分 方 程 就 有
2、 n个 独 立 变 量 , 因 此 也 就 有 n个 状 态 变 量 。一 般 一 个 系 统 状 态 变 量 的 个 数 等 于 系 统 独 立 储 能 元 件 的 个 数o 状 态 矢 量 将 这 些 状 态 变 量 写 成 矢 量 的 形 式 , 构 成 一 个 状 态 矢 量 。 如 : 12( )( )( ) ( )nx tx tx t x t 河 南 科 技 大 学 机 械 制 造 及 其 自 动 化 学 科 o 状 态 空 间 以 状 态 变 量 为 坐 标 轴 构 成 的 n维 空 间o 状 态 方 程 由 系 统 的 状 态 变 量 构 成 的 一 阶 微 分 方 程 组 ,
3、 称 为 系 统的 状 态 方 程 。o 输 出 方 程 在 指 定 系 统 的 输 出 时 , 该 输 出 与 状 态 变 量 间 的 函 数 关系 称 为 系 统 的 输 出 方 程 。o 状 态 空 间 表 达 式 状 态 方 程 和 输 出 方 程 总 合 起 来 , 构 成 对 一 个 系 统 完 整的 动 态 表 述 , 称 为 系 统 的 状 态 空 间 表 达 式 。1 2, , , nx x x 河 南 科 技 大 学 机 械 制 造 及 其 自 动 化 学 科 例 1. 求 图 示 机 械 系 统 的 状 态 空 间 表 达 式外 力 位 移 Ku(t) m y(t)b )
4、(tu ym yb ky力 学 方 程 yx 1 yx2令-弹 性 系 数阻尼系数 河 南 科 技 大 学 机 械 制 造 及 其 自 动 化 学 科 21 xx )(12 tumymbymkyx )(1 21 tumxmbxmk 1xy 动 态 方 程 如 下 河 南 科 技 大 学 机 械 制 造 及 其 自 动 化 学 科 状 态 空 间 表 达 式 为 : 21xx 0 1k bm m 21xx um 10 2101 xxy 河 南 科 技 大 学 机 械 制 造 及 其 自 动 化 学 科 例 2:求 图 示 RLC回 路 的 状 态 空 间 表 达 式解 : 以 作 为 中 间 变
5、 量 , 列 写 该 回 路 的 微 分 方 程 选 )(ti d iL d t )(tu c )(tu)(tuc c1 idt R L+_ +_u(t) uc(t) +_ yi(t)输 入 输 出Ri i1x idtCx 12 河 南 科 技 大 学 机 械 制 造 及 其 自 动 化 学 科 为 系 统 两 状 态 变 量 , 则 原 方 程 可 化 成写 成 矩 阵 矢 量 的 形 式 为 : 1x 2x dtdi LR 1x L1 2x )(tuL1 c1 1xy 2x )(tuc1x 2x LR L1c1 0 1x2x L10 )(tu 河 南 科 技 大 学 机 械 制 造 及 其
6、 自 动 化 学 科 令 为 状 态 矢 量则 : y 1x2x 101x 2xx Tx LR L1 c1 0 x L10 )(tuy 10 x 河 南 科 技 大 学 机 械 制 造 及 其 自 动 化 学 科 状 态 空 间 表 达 式o 对 于 以 上 所 举 例 题 , 可 用 如 下 通 式 来 表 示 :o 其 中 : 为 状 态 矢 量 ; A为 系 统 矩 阵 ; B为 输 入矩 阵 ( 又 叫 控 制 矩 阵 ) ; C为 输 出 矩 阵 ; D为 直接 传 递 矩 阵x Tx Ax Buy C x Du 河 南 科 技 大 学 机 械 制 造 及 其 自 动 化 学 科 o
7、 将 状 态 空 间 表 达 式 的 信 号 传 递 关 系 用 方 块 图 来 表 示 河 南 科 技 大 学 机 械 制 造 及 其 自 动 化 学 科 1.2 状 态 空 间 表 达 式 的 模 拟 结 构 图o 积 分 器 的 数 目 等 于 状 态 变 量 数 , 将 她 们 画 在 适 当 的 位 置 上 , 每 个 积 分 器的 输 出 表 示 相 应 的 状 态 变 量 , 根 据 状 态 方 程 和 输 出 方 程 画 出 状 态 空 间 表达 式 的 模 拟 结 构 图 。o 例 3 已 知 系 统 的 状 态 空 间 表 达 式 为 : 试 画 出 其 模 拟 结 构 图
8、 。 1 1 2 23 31230 1 0 00 0 1 06 3 2 11 1 0 x xx x x ux xxy xx 河 南 科 技 大 学 机 械 制 造 及 其 自 动 化 学 科 河 南 科 技 大 学 机 械 制 造 及 其 自 动 化 学 科 1.3 状 态 空 间 表 达 式 的 建 立o 一 、 由 方 块 图 建 立 状 态 空 间 表 达 式o 例 4 河 南 科 技 大 学 机 械 制 造 及 其 自 动 化 学 科 31 23 22 2 32 21 4 13 3 11 1 11 11Kx xT Kx x xT TK K Kx x x uT T Ty x 33 22
9、2 11 4 11 10 0 010 0101 0 0 KT Kx x uT T KK K TT Ty x 河 南 科 技 大 学 机 械 制 造 及 其 自 动 化 学 科 o 二 、 从 系 统 的 机 理 出 发 建 立 状 态 空 间 表 达 式o 例 5 图 示 电 网 络 系 统 , 输 入 电 流 , 输 出 电 压 和i 1Cu 2Cu 2 1 1 2 21 11 3 1 2 2 4 3 1 21 1 22 2 4 2 1 21 2 000 00 0CC CC CC diRi L udtdiR i L udtdi diu L Ldt dti i i C uC u i iC u
10、i i 河 南 科 技 大 学 机 械 制 造 及 其 自 动 化 学 科 o 以 电 容 和 上 的 电 压 和 及 电 感 和 中 的电 流 和 为 状 态 变 量 , 即 令 :o 消 去 中 间 变 量 和 得 : 1i 2i 1L 2L1C 2C 1Cu 2Cu 1 21 23 1 4 2,C Cx u x ux i x i 3i 4i1 1 1 11 21 2 2 1 2 2 1 2 22 23 31 1 2 1 21 1 1 2 1 1 2 1 1 24 42 1 2 1 22 2 1 2 2 1 2 2 1 21 10 010 ( ) ( ) ( )1 ( ) ( ) ( )1
11、 ( ) ( ) ( )C Cx xR RR R C R R C R R Cx xx xR R R R RL L R R L R R L R Rx xR R R R RL L R R L R R L R R 12 1 21 21 1 21 22 1 20( )( )( )RC R R iR RL R RR RL R R 河 南 科 技 大 学 机 械 制 造 及 其 自 动 化 学 科 o 三 、 由 系 统 的 传 递 函 数 建 立 状 态 空 间 表 达 式 ( 实 现 问 题 )o 例 6 设 系 统 的 传 递 函 数 为 :o 可 得 微 分 方 程 为 ;o 从 而 得 模 拟
12、结 构 图 和 状 态 空 间 表 达 式 如 下 011 1 0( ) n nn bW s s a s a s a ( ) ( 1)1 1 0 0n nny a y a y a y b u 1 2 2 31 0 1 1 2 1 01n nn n nx xx xx xx a x a x a x b uy x 河 南 科 技 大 学 机 械 制 造 及 其 自 动 化 学 科 o 例 7 设 系 统 的 传 递 函 数 为o 上 式 可 变 为 :o 令o 则o 即o 令 3 23 2 1 03 22 1 0( )( ) ( ) b s b s bs bY sW s U s s a s a s
13、a 22 2 3 1 1 3 0 0 33 3 22 1 0( ) ( ) ( )( ) b a b s b ab s b abW s b s a s as a 1 3 22 1 01( ) ( )Y s U ss a s a s a 23 2 2 3 1 1 3 0 0 3 1( ) ( ) ( ) ( ) ( ) ( )Y s bU s b a b s b ab s b a b Y s 3 2 2 3 1 1 1 3 1 0 0 3 1( ) ( ) ( )y b u b a b y b ab y b a b y 1 1x y 河 南 科 技 大 学 机 械 制 造 及 其 自 动 化 学
14、 科 o 可 得 系 统 的 状 态 空 间 表 达 式 为o 该 题 还 可 以 采 用 如 下 方 式 解 决o 将 传 递 函 数 化 为 微 分 方 程1 22 33 0 1 1 2 2 33 2 2 3 3 1 1 3 2 0 0 3 1( ) ( ) ( )x xx xx a x a x a x uy b u b a b x b ab x b a b x 2 1 0 3 2 1 0 2 33 2 2 1 1 0 0( ) ( ) ( )y a y a y a y bu bu bu buy bu bu a y dt bu a y dt bu a y dt 河 南 科 技 大 学 机
15、械 制 造 及 其 自 动 化 学 科 河 南 科 技 大 学 机 械 制 造 及 其 自 动 化 学 科 o 例 8 多 输 入 多 输 出 系 统 的 微 分 方 程 如 下 , 试 求 其 状 态 方 程 表 达 式 ,并 画 出 模 拟 结 构 图 。o 由 上 式 可 得1 1 1 2 2 1 1 2 1 3 22 3 2 4 1 4 2y a y a y bu b u b uy a y a y b u 2 1 1 1 1 1 2 1 3 2 2 22 4 2 4 1 3 2( ) ( )( )y bu a y dt bu bu a y dty bu a y a y dt 河 南 科
16、 技 大 学 机 械 制 造 及 其 自 动 化 学 科 o 画 出 模 拟 结 构 图 为o 状 态 空 间 表 达 式 为 1 1 1 1 12 2 2 2 3 23 4 3 3 411 22 31 0 00 00 01 0 00 0 1x a x b ux a x b b ux a a x bxy xy x 河 南 科 技 大 学 机 械 制 造 及 其 自 动 化 学 科 1.5 状 态 向 量 的 线 性 变 换o 一 、 系 统 状 态 空 间 表 达 式 的 非 唯 一 性o 设 给 定 系 统 为o 总 可 以 找 到 一 个 非 奇 异 矩 阵 T, 令o 得 变 换 后 的
17、 状 态 空 间 表 达 式o T称 为 变 换 矩 阵 x Ax Buy Cx Du x Tz 1 1z T ATz T Buy CTz Du 河 南 科 技 大 学 机 械 制 造 及 其 自 动 化 学 科 o 二 、 系 统 特 征 值 的 不 变 性 及 系 统 的 不 变 量o 1. 系 统 特 征 值o 系 统 的 特 征 方 程 :o 2. 可 以 证 明 经 非 奇 异 变 换 后 系 统 的 特 征 方 程 是 不 变 的 , 而 系统 的 特 征 方 程 是 由 特 征 多 项 式 的 系 数 所 决 定 的 , 因 此 , 特 征 多项 式 的 系 数 为 系 统 的
18、不 变 量 。o 3. 特 征 矢 量o 为 的 对 应 于 的 特 征 矢 量o 例 9 试 求 的 特 征 矢 量x Ax Buy Cx Du 0I A i i iAP PiP A i0 1 16 11 66 11 5A 河 南 科 技 大 学 机 械 制 造 及 其 自 动 化 学 科 o 解 : 特 征 方 程 为o 解 得o 对 应 于 的 特 征 矢 量 , 代 入o 解 得 令 得1 16 11 6 06 11 5I A 3 26 11 6 0 1 1 2 2 3 3 1 1 1P 1 1 1AP P11 1121 2131 310 1 16 11 66 11 5 p pp pp
19、 p 21 0p 11 31p p 11 31 1p p 1 101P 河 南 科 技 大 学 机 械 制 造 及 其 自 动 化 学 科 o 同 理 , 可 以 算 出 对 应 于 时 的 特 征 矢 量o 和 对 应 于 时 的 特 征 矢 量o 三 、 状 态 空 间 表 达 式 变 换 为 约 当 标 准 型o 系 统o 经 过 变 换 矩 阵 T变 换 为o 其 中o 称 为 约 当 标 准 型 2 2 2P3 3 3P 2 124P 3 169P x Ax Buy Cx Du 1 1 1z T ATz T Bu Jz T Buy CTz Du 1 2 00 nJ 1 1 1 11
20、0 010 00 0q nJ 河 南 科 技 大 学 机 械 制 造 及 其 自 动 化 学 科 o 1. 特 征 值 无 重 根 时设 特 征 根 所 对 应 的 特 征 矢 量 为构 造 的 变 换 矩 阵 为如 果 特 征 根 互 不 相 等 , 有可 使例 : 将 下 列 状 态 空 间 表 达 式 变 换 为 对 角 线 型 。 1 2 nP P P P 1 2 nT P P P P i i iAP P1 21 00 NT AT 0 1 1 06 11 6 06 11 5 11 0 0 x x uy x 河 南 科 技 大 学 机 械 制 造 及 其 自 动 化 学 科 解 : (
21、1) 求 特 征 根 由 得 , , ( 2) 求 特 征 矢 量 和 变 换 矩 阵 由 可 求 得 0I A 1 1 2 2 3 3 1 101P 2 124P 3 169P 1 2 3 1 1 10 2 61 4 9T P P P 1 3 5/ 2 23 4 31 3/ 2 1T 1 1 020 3T AT 1 231T B 1 1 1CT i i iAP P 河 南 科 技 大 学 机 械 制 造 及 其 自 动 化 学 科 o 特 征 值 有 重 根 时 的 变 换 设 的 特 征 值 有 个 重 根 为 , 其 余 的 根 互 异 , 则 前 个 特 征 矢 量可 根 据 下 式
22、求 得 , 而 其 余 特 征 矢 量 仍 按 互 异 方 法 求 得 。 其 变 换 矩 阵 为 : 其 中 :例 : 将 下 列 状 态 空 间 表 达 式 化 为 约 当 标 准 型 。q 1A 1 1i i iAP P P 1 2 1q q nT P P P P P 0 1 0 00 0 1 02 3 0 1 1 0 0 x x uy x q 河 南 科 技 大 学 机 械 制 造 及 其 自 动 化 学 科 解 : ( 1) 求 特 征 根 由 得 , , 由 求 得 0I A 1 1 2 1 3 2 1 111P 2 101P 3 124P 1 2 3 1 1 11 0 21 1
23、4T P P P 1 2 5 21 6 3 39 1 2 1T 1 1 1 010 2J T AT 1 21 39 1T B 1 1 1CT 1i i i iAP P P 河 南 科 技 大 学 机 械 制 造 及 其 自 动 化 学 科 1.6 从 状 态 空 间 表 达 式 求 传 递 函 数 阵一 、 传 递 函 数 阵1. 设 给 定 系 统 为 对 上 式 两 边 进 行 零 初 始 条 件 下 的 拉 氏 变 换 , 得 故 有 x Ax Buy Cx Du 1( )( ) ( )( )ux X sW s sI A BU s 1 1( ) ( ) ( )( ) ( ) ( ) (
24、)X s sI A BU sY s C sI A BU s DU s 1( )( ) ( )( )uy Y sW s C sI A B DU s 河 南 科 技 大 学 机 械 制 造 及 其 自 动 化 学 科 二 、 系 统 在 各 种 连 接 时 的 传 递 函 数1. 并 联 连 接 o 串 联 连 接o 反 馈 连 接 1 1 1 12 2 2 211 2 1 2200 ( )x A x B ux A x Bxy C C D D ux 1 111 2 1 21 22( ) 0( ) ( )0 ( ) BsI AW s C C D DBsI A 1 2( ) ( )W s W s 2
25、1( ) ( ) ( )W s W s W s 11 2 1( ) ( ) ( ) ( )W s W s I W s W s 河 南 科 技 大 学 机 械 制 造 及 其 自 动 化 学 科 1.7 离 散 系 统 的 状 态 空 间 表 达 式一 、 差 分 方 程 及 传 递 函 数差 分 方 程 传 递 函 数 Z变 换 1 1 01 1 0( ) ( 1) ( 1) ( )( ) ( 1) ( 1) ( )nn ny k n a y k n a y k a y kb u k n b u k n bu k b u k 11 1 011 1 0( )( ) ( ) n nn nn nnb
26、 z b z b z bY zW z U z z a z a z a 0 ( ) ( ) ( ) ( ) ( ) kknZ y k Y z y k zZ y k n z Y k 河 南 科 技 大 学 机 械 制 造 及 其 自 动 化 学 科 二 、 离 散 系 统 的 状 态 空 间 表 达 式 及 模 拟 结 构 图1. 状 态 空 间 表 达 式由 令则 ( 1) ( ) ( )( ) ( ) ( )x k Gx k hu ky k Cx k Du k 11 1 0 11 1 01 21 1 2 2 0 011 1 0( )( ) ( )( ) ( ) ( )n nn nn nnn n
27、n n n n n n nn n nnb z b z b z bY zW z U z z a z a z ab a b z b a b z b a bb z a z a z a 1 11 1 01( ) ( )n nnY z U zz a z a z a 1 21 1 1 2 2 0 0( ) ( ) ( ) ( )( ) ( ) ( )n nn n n n n n n nY z b z U z Y z b a b z b a b z b a b 河 南 科 技 大 学 机 械 制 造 及 其 自 动 化 学 科 从 而 得按 照 上 式 可 以 画 出 离 散 系 统 的 模 拟 结 构 图
28、以 三 阶 系 统 为 例 得 如 下 模 拟 结 构 图 1 1 1 2 2 1 0 0 1( ) ( ) ( ) ( 1) ( ) ( 2) ( ) ( )n n n n n n n ny k b u k b a b y k n b a b y k n b a b y k 河 南 科 技 大 学 机 械 制 造 及 其 自 动 化 学 科 1.8 时 变 系 统 和 非 线 性 系 统 的 状 态 空 间 表 达 式一 、 线 性 时 变 系 统二 、 非 线 性 系 统在 附 近 展 开 成 泰 勒 级 数 得 即( ) ( )( ) ( )x A t x B t uy C t x D
29、t u ( , , )( , , )x f x u ty g x u t 0 0 0( , , )x y u 0 0 0 0 0 0 0 00 , ,0 , ,x u x ux u x uf fx x x x ux ug gy y y x ux u x Ax Buy Cx Du 河 南 科 技 大 学 机 械 制 造 及 其 自 动 化 学 科 本 章 总 结o 掌 握 状 态 方 程 、 状 态 空 间 表 达 式 的 概 念o 掌 握 标 准 型 、 约 当 标 准 型 、 特 征 矢 量 和 变 换 矩阵 的 概 念o 学 会 由 微 分 方 程 求 状 态 空 间 表 达 式 及 传 递 函 数阵 画 模 拟 结 构 图o 学 会 由 状 态 空 间 表 达 式 画 模 拟 结 构 图 , 求 传 递函 数
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
