 时间和时钟3
时间和时钟3

《时间和时钟3》由会员分享,可在线阅读,更多相关《时间和时钟3(8页珍藏版)》请在装配图网上搜索。
1、JUSTIMING关于时间服务应用的简述频率源应用简述:频率源按照应用的特征来分,大体可分为两种类型:|一种做时间服务,|一种做时钟服务。两种应用的特性作如下比较:应用功能工作频段表现形式典型器件频率稳定性特征表征的指标时间 服务同步基带时间戳+时间信息单位原子钟漂移特性单调长 稳, 中稳时钟 服务调制解调射频时钟信号、载波低相噪OCXO抖动特性高斯短稳,相噪作为时间应用,通常由于原子钟价格比较昂贵,所以比较实际的应用是采用 GPS/北斗 +OCXO来实现空口同步。在此应用方案中关键指标是:1 GPS/北斗接受模块本省输出的PPS的精度和稳定度,通常用输出PPS的时长值正态分 布的方差a来表示
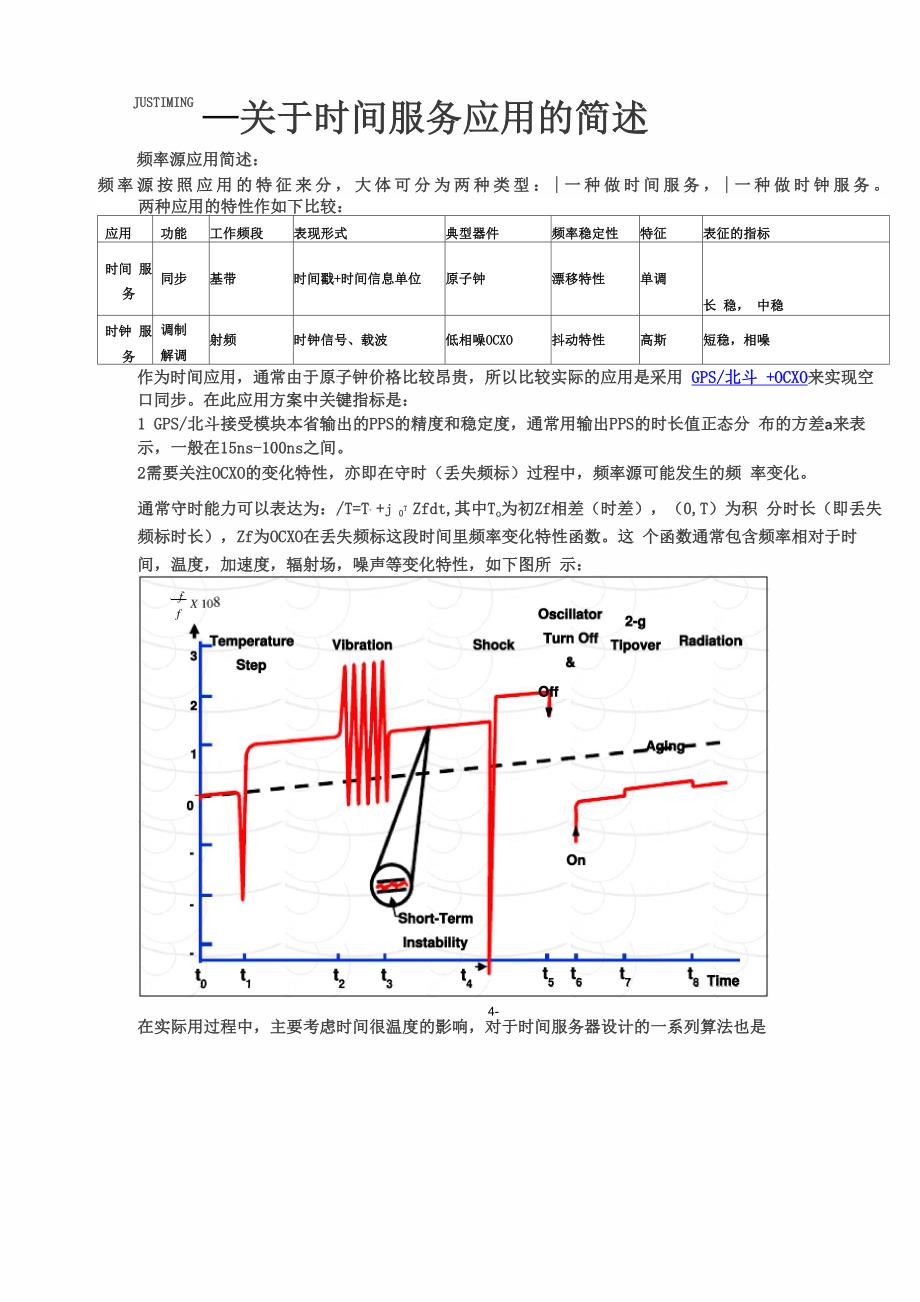
2、,一般在15ns-100ns之间。2需要关注OCXO的变化特性,亦即在守时(丢失频标)过程中,频率源可能发生的频 率变化。通常守时能力可以表达为:/T=T+j 0T Zfdt,其中To为初Zf相差(时差),(0,T)为积 分时长(即丢失频标时长),Zf为OCXO在丢失频标这段时间里频率变化特性函数。这 个函数通常包含频率相对于时间,温度,加速度,辐射场,噪声等变化特性,如下图所 示:4-在实际用过程中,主要考虑时间很温度的影响,对于时间服务器设计的一系列算法也是围绕这些特性设计的。系统结构程序过程:1开机上电系统自上电起,有预热过程,此时OCXO的恒温槽处于加温状态,频率在逐渐上升,一般2-3
3、分钟后OVEN工作进入稳定状态(电流下降到正常工作水平),在这一过程中,OCXO频率变化有如下特性 10b r p g彗臺蚩,哼 |辜, :.冬.a文件也)編辑 视S(V)插入 格式(Q)工具0数据 窗口迪 帮助)MilWarmupFnom 0Type JTM7501Sn 8480038Date 2206/2009 下午 03Duration 1041 minMeas st即 40 s(qdd) uo 遇 Aap AouanbaLL.-471.9961Start frequency 9999993 98 HzEnd frequency 9999995.296 HzBench 58 Rack .
4、 2 Card 1 Position 1-468.4961-468.9961-469.4931 -469991-470.4961-470.9961 -471.4961Y max 437 2 ppbY min : -601.9 ppbDelta 164 7 ppbX scale 120 min/div.Y scale 0 5 ppb/div.9LOON9LOO&9LO999LOO6D9LOOOL9LOOZL9LOO&L9LO99LTime after turn on (hh:mm:ss)Software version: G350-0Q06-A4 - 051X2006如上图可见,前2小时里OCX
5、O的频率变化仍然剧烈,此阶段如果丢失频标,建议守时的频率标签釆用 前一次稳定工作时获得的频率数据。M V W Datas/Minis/Maxis 亦迅缶观/Bl购2 数 GM9O&22_1F3 暑 arL数字lOmhz的OCXO进入FPGA之后建议先倍频到lOOmhz。FPGA中的频率计数时长建议在(1024s, 4096s)之间取决于系统设计指标。注意COUNTER的计数务必是 连续的,不是分段加总。如1024s计数到100mhz的脉冲个数应该是:124000000000,如果用二进制数 表示大概要37位。3频率标签计算对于高精度的要求,比如要守时到24小时1.5us以内,或者系统计算的频率
6、精度到25*10-11以上时,需要考虑对COUNTER直接获得的频率标签进行修正。如下示意图:F=f2+(f2-f1)/3对于低精度守时要求比如1小时守时1us或者系统的频率精度在1*10-10以下的,可以不考虑校正COUNTER中的读数。4 PPS输出(跟踪,守时)输出端的设计主要是要考虑输出PPS的精确度和稳定度,分为两个阶段考虑,在跟踪阶段,此时频标仍 然存在,但是输出的PPS如果直接参照(或者依据判别)从GPS模块获得的PPS的沿的话,那么GPS模 块输出抖动将会被全部引入到输出端,这样系统输出的也会出现1OONS的高斯分布的抖动。建议沿的判 别依据OCXO晶振周期的沿。通常OCXO的
7、沿抖动特性会非常好(一般可以到几个ps),但是由OCXO合成 的PPS可能和标准的PPS的脉宽有一定差值。这个差值可以由COUNTER中的读书获得,如COUNNTER读 到1024s的晶振周期总数为1024X100000000+4 (lOOmhz的计数频率).这个时候如果再用100000000 个晶振周期代表1pps的话,那么每1024s和UTC会相差4*10ns=40ns。若要校准这个误差,需要在1024s 里平均插入40ns,即没256s插入一个晶振周期。5补偿及高阶算法高阶算法的核心思想,是根据晶体的变化特性,推演出在丢失频标这段时间里由于频率变化引起的累积 时差,然后做一个补偿。目前这
8、个补偿基本上是针对频率随时间的变化特性(老化率),对于温度的变 化特性基本上还没有成熟的算法可以有效实现。频率对于时间的变化特性可以由如下公式体现:F=Aln(Bt+1)+c (其中F表示频率,t表示时间,A,B,C是系数)如下图所示鸿晔科技JUSTIMING TECHNOLOGY其中A,B,C系数随每一个晶振都会不同,所以不能用一个固定的系数在所有的晶振上。要获得每一个 晶振具体的A,B,C的系数,需要正对晶振的特性做回归分析。由于直接做对数回归比较困难 建议将对数回归转化为线性回归,可以做如下转化:/(f)二山血(& + l) + C若 BT1 则 T=ln (Bt) =lnB+lntF=
9、AI nB+Al nt+C=Al nt+Al nB+C令T=l nt则F=AT+Al nB+C此时做线性回归即可得出A, B,C的值。做线性回归可以采用最小二乘法。(不过一般的高级语言的开发工具里应该带有回归的库函数)H老化率用摄小1乘法计算,基本公式如(11)式所示:(11)式中:n I IM S的次数;t取样个数:ft口时刻测量:的品振输出频率值;L取样时序,用自然数列衣示;这个是回归算法的一个简单解释算法注意点:以下注意点1-7都是基本优化没有对OCXO频率的变化做补偿。首先应根据设计需求做一 个理论上的量化推演,以变电站主钟为例,假定设计指标为,丢失频标24小时内,OCXO 守时的PP
10、S和频标的PPS相差不超过4us。根据我们前面提及的公式/T=T0+,0T /fdt (假定系统的频率变化是单调线性的,T=24H=86400S, /T=4US)可以简单推演出系统容许 的频率变化量/ f=9*10-ii.1 GPS模块输出PPS存在一个a为15ns到100ns不等的高斯分布的抖动,我需要通过累 计时长的方式来消除抖动对于系统频率测量的误差,以100ns抖动为例,累计时长需要大 于1*10-7/9*10-11.大致等于1100s,当然我系统设计的时候需要留有余量,所以此处我们 建议累计时差为4096S2 CPLD/FPGA中的COUNTER计数时存在模糊脉冲的问题,建议先将OC
11、XO倍频到100mhz以 上再进入counter。由于CPLD/FPGA是一个逻辑器件,对于OCXO的频率的计算都是基于 整数个脉冲周期,如果晶振的沿不能和计数结束的沿对其的话,会存在系统偏差(即模糊 脉冲)。提咼晶振频率有利于减少系统误差3对于高精度的时间应用,需要比较大的门限时间(可能会到4096秒),此时在守时状态 时给备用的时钟贴的频率标签(COUNTER里的频率读数),和实际丢失频标那一刻的频率 可能存在误差,误差的值对于高精度的应用存在一定的影响。这个误差来源于晶振的老化 特性,和温度稳定性。随着计时长度的增加,老化引起的频率偏差也会增加。消除偏差的 办法一般是补一定频差,具体的数
12、值跟每一颗OCXO的特性有关。可以通过高阶算法获得 OCXO的频率变化规律做补偿,如果不想做复杂的高阶算法,也可以做简单的直线补偿。 即根据前两次COUNTER里的计数值,取两次差值的1/3的做频率校准,校准的方向跟前后 两次差值的趋势一致,如后一次COUNTER的值比前一次的大,那么就加1/3差值,反之则减去。4关于时间输出方面,守时期间输出的PPS 般时候OCXO的晶振周期沿来产生,由于lpps 的时间长度有可能不是严格的整数个晶振周期,所以要想继续产生lpps就需要对lpps 做一定的修正,修正的办法就是根据实际COUNTER里的读书,再均匀的插入整数个晶振周 期和1PPS之间的偏差。比
13、如4096S里测得晶振周期数是4096*100m+4。那么在输出PPS 的时候就需要做如下处理。正常情况下1PPS由100m个晶振周期产生, 但每隔4096/4=1024S加一个脉冲周期来补充。5输出的PPS也存在抖动,这个抖动一来源于系统的判别依据(跟GPS的模块有一定关 系)和电路本身的噪声。在有频标的状态下,如果希望系统输出的PPS的抖动特性也比较 好,那么最好这个PPS也是有OCXO的沿来产生。这中情况下就需要考虑到OCXO第4点的 问题,同时也需要考虑OCXO本身的变化特性。6系统如果也需要输出时钟信号(比如10mhz),并且对频率的准确度有一定的要求,那 么系统需要对OCXO进行调
14、教。一般使用DAC来做频率校准,需要考虑到OCXO的频率牵 引特性。这个就需要考虑的DAC本身的数字分辨率,以及模拟分辨率(这个和参考电源有 关系)。一般要求DAC的数字分辨率在16位以上,DAC的参考电源的纹波在50uv以内。7如果系统同时存在时间应用和时钟应用两中需求,那么会用到DAC,此时要考虑应用于 DAC部分的算法可能会和做时间应用的算法(前面介绍的1-5条)会产生干扰。当COUNTER 对OCXO频率计算完成的时候,如果DAC也在动作有可能就会造成频率标签不准,守时期 间也会引入误差。所以我们一般建议DAC的调整动作必须在两次COUNTER计数之间完 成。8对于需要实现24小时1US以内的守时要求的场合需要做高阶算法,这个需要考虑OCXO 本省频率变化特性。由于每一颗OCXO的特性不一样,所以要得到具体的变化特性,需要 做回归分析。通常我们会给晶振的老化建一个对数回归的特性方程。在跟踪运行期间生成 产品的变化特性,在守时阶段利用这个特性做补偿,这一部分设计的方法比较复杂,在此 不作更深讨论。最后说明一下在温度变化比较大的情况下,算法的作用会被显著削弱。
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
