 汽车总体设计整车性能38469
汽车总体设计整车性能38469

《汽车总体设计整车性能38469》由会员分享,可在线阅读,更多相关《汽车总体设计整车性能38469(36页珍藏版)》请在装配图网上搜索。
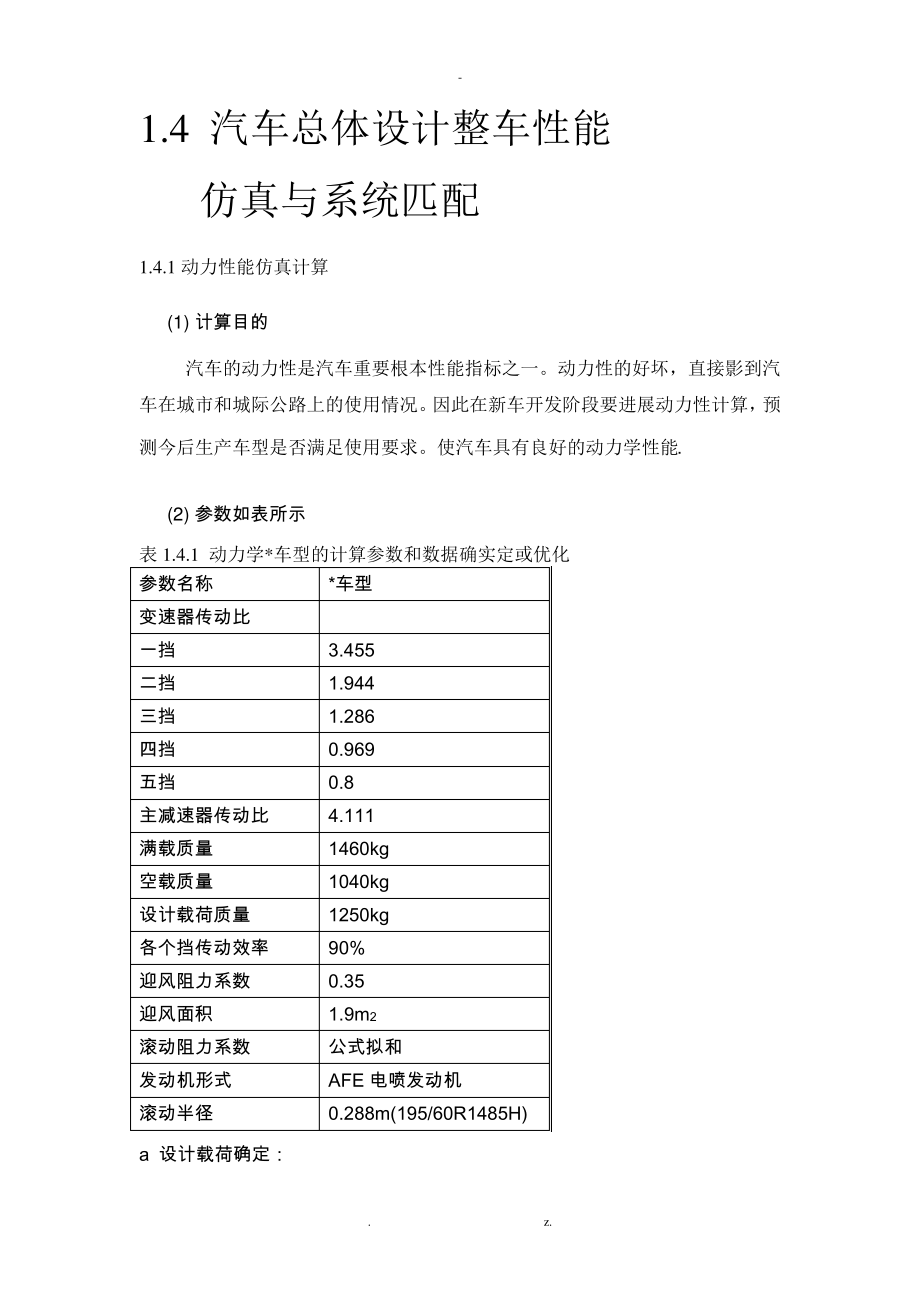
1、-.z.1.4 汽车总体设计整车性能 仿真与系统匹配 1.4.1 动力性能仿真计算(1)计算目的 汽车的动力性是汽车重要根本性能指标之一。动力性的好坏,直接影到汽车在城市和城际公路上的使用情况。因此在新车开发阶段要进展动力性计算,预测今后生产车型是否满足使用要求。使汽车具有良好的动力学性能.(2)参数如表所示 表 1.4.1 动力学*车型的计算参数和数据确实定或优化 参数名称*车型 变速器传动比 一挡 3.455 二挡 1.944 三挡 1.286 四挡 0.969 五挡 0.8 主减速器传动比 4.111 满载质量 1460kg 空载质量 1040kg 设计载荷质量 1250kg 各个挡传动
2、效率 90%迎风阻力系数 0.35 迎风面积 1.9m2 滚动阻力系数 公式拟和 发动机形式 AFE 电喷发动机 滚动半径 0.288m(195/60R1485H)a 设计载荷确定:-.z.该车型设计载荷根据德国标准 DIN 70020 规定:在空车重量整备质量的根底上加上座位载荷。5 座位轿车前面加 2 人、后排加 1 人,也称为半载作为设计载荷,重量假定为 68kg 加上随身物品 7kg,重心对于不可调整座位在 R 点设计 H 点前 50mm,可调整作为 R 点前 100mm 处。我国标准常常规定满载作为设计工况.对于该计算车型如采用德国标准,则具体计算为:1070kg+3*68kg+7k
3、g=1295kg b 迎风面积:根据迎风面积计算公式:A=0.78BH 确定,其中:A 迎风面积,B 车宽,H车高。对于该车型而言具体计算为:A=0.78*1710mm*1427mm=1.90m2 c 传动效率:根据该轿车的具体传动系统形式,传动系统的传动效率大体可以由变速器传动效率,单级主减速器传动效率,万向节传动效率组成。具体计算为:95%变速器 乘 96%单级主减速器 乘 98%万向节=89.4%,同时考虑到,一般情况下采用有级变速器的轿车的传动系统效率在 90%到 92%之间,对上述计算结果进展圆整,对传动系统效率取为90%d 滚动阻力系数:滚动阻力系数采用推荐拟和公式进展计算:)19
4、440/1(20auff,其中:0f取为 0.014良好水泥或者沥青路面,au为车速 km/h。-.z.(3)发动机外特性曲线 i.AJR 发动机 ii AFE 发动机 图 1.4.1 发动机外特性曲线(4)根本理论概述 汽车动力性能计算主要依据汽车驱动力和行驶阻力之间的平衡关系:jiwftFFFFF 1.4.1 表 1.4.2 各种受力名称 tF_ 驱动力,fF_ 滚动阻力,wF_ 空气阻力,iF_ 坡道阻力,jF_ 加速阻力,上述驱动力和行驶阻力的计算方法以及各个曲线的计算方法具体说明如下:驱动力行驶阻力平衡图:驱动力:dggtqtriiTF0,N 1.4.2 其中:tqT:发动机的扭矩,
5、根据发动机使用外特性曲线来确定。也就是说我们可以根发动发动机-.z.据发动机的转速利用外特性曲线进展插值计算来获得,单位 N.M.gi:变速器各个挡位的传动比 0i:主减速器传动比 g:传动系统各个挡位情况下的传动效率 dr:车轮的滚动半径,单位 m 滚动阻力:)cos(mgfFf,N1.4.3 其中:m:是汽车计算载荷情况下的质量,单位:kg g:重力加速度,单位:m/s2 f:汽车滚动阻力系数:道路坡角,单位:rad 空气阻力:15.212aDwuACF,N 1.4.4 其中:DC:空气阻力系数,A:迎风面积,单位:m2 au:车速,单位是 km/h 坡道阻力:)sin(mgFi,N 1.
6、4.5 其中:m:计算载荷情况下汽车的质量,单位:kg g:重力加速度,单位:m/s2:道路坡角,单位:rad-.z.加速阻力:dtdumFaj,N 1.4.6 其中:旋转质量换算系数,根据估算公式2211gi确定,在轿车中1和2取值范围在 0.03 到 0.05 之间,我们取平均数值1=2=0.04 m:计算载荷情况下汽车的质量,单位:kg dtdua:汽车行驶加速度,单位:m/s2 在进展不同挡位的驱动力和阻力计算时我们还需要知道车辆速度与发动机转速之间的关系:0377.0iinrugda,1.4.7 其中:au:车速,单位是 km/h n:发动机转速,单位是 rpm 0i:主减速器传动比
7、 g:传动系统各个挡位情况下的传动效率 dr:车轮的滚动半径,单位:m 根据上述公式我们就可以方便确实定出汽车的驱动力行驶阻力平衡曲线,求出驱动力和行驶阻力的交点即为最高车速。动力因数图 动力因数定义公式:mgFFDwt 1.4.8 其中各个参数的含义同前面的说明。-.z.利用公式1.4.8结合前面公式就可以计算出汽车各个挡位的动力因数。功率平衡图 在公式1.4.1的根底上,如果我们在公式两端乘以车辆速度au,经过整理就可以得到功率平衡计算公式单位是 kW:)3600761403600)sin(3600)cos(13dtdumuAuCumgumgfPaaaDaage1.4.9 其中:eP:发动
8、机效率,单位 kW 其他各个参数的意义和单位同上述说明。利用公式1.4.9我们就可以计算出汽车行驶功率平衡曲线。爬坡度曲线 由于计算爬坡度时,汽车除了抑制空气阻力,滚动阻力之外所有的剩余驱动力都用来抑制坡道阻力,所以加速阻力为零。根据公式1.4.1我们可以得到如下公式 代入公式1.4.3,1.4.5我们就可以得到如下公式:如果我们代入公式 2sin1cos以及公式1.4.8,经过整理则我们就可以得到:22211arcsinffDfD 1.4.10 然后根据公式tgi 进展转换,这样就可以计算出爬坡度曲线了。加速时间 汽车的驱动力除了用来抑制空气阻力,滚动阻力以外主要是用来抑制加速阻力,此时坡道
9、阻力为零。-.z.根据公式1.4.1,1.4.6我们可以得到如下公式:所以 时间211uujduat 然后我们采用龙贝格数值积分计算方法对上面的公式进展积分就可以得到所需要的加速时间曲线。(5)计算分析 根据上述条件以及相关的计算理论,得到如下计算结果。a.该车型的计算实例 i.驱动力行驶阻力平衡图 图 1.4.2 汽车驱动力与行驶阻力平衡图 汽车驱动力阻力平衡图车速 V (km/h)160140120100806040200驱动力-阻力F (kN)40-.z.动力因数图 图 1.4.3 汽车动力特性图 功率平衡图 图 1.4.4 汽车功率平衡图 汽车功率平衡图车速 V (km/h)16014
10、0120100806040200功率 P (kW)806040200 汽车动力特性图 V (km/h)160 140 120 100 80 60 40 20 0 D 0.5 0.4 0.3 0.2 0.1-.z.加速度曲线 图 1.4.5 汽车加速度曲线图 爬坡度曲线 图 1.4.6 汽车爬坡度曲线图 汽车爬坡度图车速 V (km/h)16014012010080604020爬坡度 i x100%45403530252015105汽车爬坡度图车速 V (km/h)16014012010080604020爬坡度 i x100%45403530252015105-.z.时间速度曲线 图 1.4.7
11、 汽车加速时间曲线图 根据上述计算条件和计算结果,我们可以确定设计载荷情况下的计算结果:表 1.4.3 计算结果 工程 计算数值 公布数值 汽车最高车速 169.0km/h 165km/h 0 到 100km/h 加速时间 13.0s 13.9s 最高档 30km/h 加速通过 400m 时间 23.0s 原地起步加速通过 400m 时间 18.8s 最高档最大动力因数 0.1 最大爬坡度 48.4%从上面的计算结果我们可以看出,试验数值同计算数值之间的误差根本控制在5%工程误差范围之内,汽车的动力性能计算和仿真结果是正确的,可以进展整车匹配设计。时间速度曲线时间(s)323028262422
12、20181614121086420速度 V(m/s)1601501401301201101009080706050403020100-.z.1.4.2 燃油经济性能仿真 随着世界石油危机的出现,节约汽车用油是现代汽车制造业和运输业必须首先考虑的问题,在汽车设计之初就必须对所设计汽车的经济性有准确的评价。(1)等速百公里油耗计算原理 汽车等速百公里油耗计算主要是依据汽车发动机的万有特性曲线以及汽车功率平衡图进展油耗计算。计算具体过程说明如下:首先计算汽车在不同车速情况下以最高挡位行驶时的阻力功率,主要是空气阻力功率和滚动阻力功率。根据动力性能的计算公式我们可以知道)761403600)cos(1
13、3aDageAuCumgfP (1.4.11 其中:eP:发动机功率,单位:kW g:传动系统各个挡位情况下的传动效率 m:是汽车计算载荷情况下的质量,单位:kg。g:重力加速度,单位:m/s2 f:汽车滚动阻力系数:道路坡角,单位:rad DC:空气阻力系数 A:迎风面积,单位:m2 au:车速,单位:km/h 然后根据公式-.z.0377.0iinrugda,1.4.12 来确定最高挡位情况下发动机转速和车速之间的关系以获得对应不同车速的发动机转速。其中:au:车速,单位:km/h n:发动机转速,单位:rpm 0i:主减速器传动比 gi:传动系统各个挡位情况下的传动效率 dr:车轮的运动
14、半径,单位:m 最后利用已经获得的发动机转速和发动机功率根据万有特性曲线进展插值计算获得燃油消耗率mg,然后根据公式:)00102.0/(gugPeQamS 1.4.13 计算得出等速百公里油耗。其中:SQ:等速百公里油耗,单位:L mg:发动机的实际燃油消耗率.我们利用万有特性曲线通过对转速和功率的插值计算来获得,单位:g/kW/h Pe:发动机工作功率,我们采用设计的阻力功率来获得,也就是包括滚动阻力功率,迎风阻力功率加速阻力和坡路阻力为零,单位:kW au:汽车行驶车速,利用车速同发动机转速之间的关系,我们就可以得到这时的发动机转速,单位:Km/h :燃油密度,单位:kg/m2-.z.g
15、:重力加速度,单位:m/s-2(2)微型车 10 个工况油耗 微型车 10 工况油耗是根据国家标准规定的汽车复杂运行工况来计算的,汽车运行工况的具体规定参见图1.4.8。图 1.4.8 汽车十工况试验循环 从上面的图形我们可以看出这些复杂公况主要包括加速工况、恒速工况、减速工况,怠速工况等等。下面我们逐一说明具体的计算方法:a 恒速工况 计算方法同等速百公里油耗的计算方法类似。首先利用公式1.4.11 ,1.4.12 确定汽车运行状态的功率与车速,然后根据下面公式计算对应的单位时间油耗:)3671.0/(ggPeQmt单位:L/s (1.4.14 其中:tQ:等速百公里油耗,单位:L mg:发
16、动机的实际燃油消耗率,我们利用万有特性曲线通过对转速和功率的插值计算来获得,单位:g/kW/h Pe:发动机工作功率,我们采用设计的阻力功率来获得,也就是包括滚动阻力功率,迎风阻力功率加速阻力和坡路阻力为零,单位:kW au:汽车行驶车速,利用车速同发动机转速之间的关系,我们就可以得到这时的发动机转速,单位:Km/h :燃油密度,单位:kg/m2 g:重力加速度,单位:m/s-2-.z.然后根据公式:ctctQQ单位:L 计算这段恒速阶段时间内的油耗。其中:ct:行驶时间,单位:s 同时这段时间内的行使距离为:cactuS/3.6单位:m 其中au为行驶速度,单位:km/h。b 加速工况 根据
17、动力性能计算说明书,我们可以知道汽车在行驶过程中的功率表达方式为:)3600761403600)cos(13dtdumuAuCumgfPaaDage1.4.15其中:eP:发动机工作功率,单位:kW g:传动系统各个挡位情况下的传动效率 m:是汽车计算载荷情况下的质量,单位:kg。g:重力加速度,单位:m/s2 f:汽车滚动阻力系数:道路坡角单位:rad DC:空气阻力系数,A:迎风面积,单位:m2 au:车速,单位:km/h:旋转质量换算系数,根据估算公式2211gi确定,在轿车中1和2 取值范围在 0.03 到 0.05 之间,我们取平均数值1=2=0.04-.z.m:计算载荷情况下汽车的
18、质量,单位:kg dtdua:汽车行驶加速度,单位:m/s2 然后确定不同挡位情况下发动机转速和车速之间的关系以获得对应不同车速的发动机转速。最后利用已经获得的发动机转速和发动机功率根据万有特性曲线进展插值计算获得燃油消耗率mg。则我们可以根据公式:gPQmet3671.0,L/s 1.4.16 确定单位时间内的燃油消耗量。我们把加速阶段内的燃油消耗量用积分公式表达成为:21tttadtQQ,L (1.4.17)其中:2t,1t为加速开场和截止时间,单位 s。如果这段计算期间开场速度为1au(单位:km/h),截止速度为2au(单位:km/h),则这段时间内的行驶距离为:dtduuusaa92
19、.252122 单位:m c 减速工况 因为减速工况下,汽车油门松开并且轻微制动,则这段时间内的油耗为怠速油耗消耗率与减速时间的乘积。其中:iQ:怠速油耗消耗率,单位:L/s;dt:减速时间,单位 s。-.z.如果这段计算期间开场速度为1au(单位:km/h),截止速度为2au(单位:km/h),则这段时间内的行驶距离为:dtduuusaa92.252221 单位:m d 怠速停车公况 如果怠速停车时间为st(单位:s),则燃油消耗量idQ单位:L为:其中:iQ:怠速油耗消耗率,单位:L/s;st:时间,单位:s 综合上述计算,对等速,等减速,怠速组成循环工况的等效百公里油耗为:100000s
20、QQs单位:L 其中:Q:为各个阶段燃油消耗量的总和单位:L。s:为各个阶段行驶路程总和单位:m。(3)输入参数 表 1.4.4 输入参数 参数名称*微型汽车 发动机形式 456Q 总重 1450kg 空气阻力系数 0.44 传动效率 90%迎风面积 2.25m2 主减速器传动比 5.125 变速器 5 挡 1 挡 3.652 2 挡 1.947-.z.3 挡 1.423 4 挡 1.0 5 挡 0.795 滚动阻力系数 0.013 燃油密度 7.05N/cm3 车轮半径 0.265m 怠速燃油消耗率 0.299ml/s(4)计算实例结果 a.多工况油耗 工况 油耗 10 工况 8.77L b
21、.*微型车 4 挡等速百公里油耗 图 1.4.9*微型车 4 挡等速百公里油耗 c.*微型车 5 挡等速百公里油耗 图 1.4.10*微型车 5 挡等速百公里油耗 1.4.3 操纵稳定性仿真和系统优化(1)计算目的 汽车操纵稳定性不仅影响到汽车驾驶的操纵方便程度,而且也是决定高速汽车平安行驶的一个重要性能,根据操纵稳定性涉及的具体内容需仿真计算包括如下几个方面的内容:时域计算、频域计算、瞬态响应计算、稳态响应计算、角输入响应计算、力输入响应计算等内容。-.z.(2)角阶跃输入响应 a 原理 如图 1.4.11,我们采用三自由度汽车模型,也就是航向角、车身侧倾角、重心处侧偏角来描述汽车的运动。根
22、据围绕 Z 轴,*轴的力矩平衡以及沿 Y 轴的受力平衡列出微分方程,然后进展求解。图 1.4.11 三自由度模型 b 方程推导(a)坐标系统 依据上图以汽车静止时重心铅垂线与侧倾轴线的交点为坐标原点,以汽车纵向水平轴线取为*轴线,前进方向为正方向,过原点与*轴垂直方向向上为 Z 轴,与*,Z 轴线垂直方向为 Y 轴线,坐标系统符合右手法则。在将前轮转向角转向盘转角看做输入时,汽车的运动状态可以用三个广义坐标来表示:航向角、重心侧偏角和车身侧倾角。按右手定则,、的正向与 Z 轴一致。正向与*轴正向一致。轮胎在侧向力作用下产生侧偏角1前轮与2后轮,它们由侧向力1yP、2yP与相应轮胎的特性所决定。
23、在既定侧偏角方向的情况下,1yP、2yP以与Y 轴相反的方向为正。(b)符号说明 如果单位不进展特殊说明均采用国际单位制。M:整车质量kg-.z.sM:悬架上质量(kg)l:轴距(m)ba,:重心到前后轴的距离(m)zI:整车绕垂直轴线的转动惯量(kg.m2)xcI:悬架上质量绕通过悬挂质量重心的*轴的转动惯量(kg.m2)xzI:悬架上质量绕通过悬挂质量重心的*,Z 的轴惯性积(kg.m2)fk:前轮单侧侧偏刚度(N/rad)rk:后轮单侧侧偏刚度(N/rad)1N:前轮回正力矩系数(N.m/rad)2N:后轮回正力矩系数(N.m/rad)1fE:前轮侧倾转向系数 2rE:后轮侧倾转向系数
24、1C:前侧倾角刚度(N.m/rad)2C:后侧倾角刚度(N.m/rad)fD:前侧倾角阻尼(N.m/rad/s)rD:后侧倾角阻尼(N.m/rad/s)h:侧倾力臂(m),悬挂上质量重心到侧倾中心的垂直距离:汽车航向角(rad):悬架上质量与悬架下质量之间相对侧倾角(rad):重心处速度与绝对坐标之间的夹角(rad).r:横摆角速度(rad/s)-.z.p:侧倾角速度(rad/s):重心处侧偏角(rad)1:前轮有效侧偏角(rad)2:后轮有效侧偏角(rad):名义前轮转角(rad)V:车速(m/s)112fykP:前轮侧向力(N)222rykP:后轮侧向力(N)(c)方程推导过程 在上述坐标
25、系统中,坐标原点 O 的绝对加速度在 Y 轴方向的投影为:cos.dtdVY 在不太大的范围内,1cos,故)()(.rVdtddtdVdtdVY (1.4.18)悬架上质量重心的横向绝对加速度在Y 轴上的投影为 phrVphYsY )(.(1.4.19)按达朗贝尔原理,可列出如下三个平衡方程:绕 Z 轴力矩平衡式:21yyxzsbPaPpIrI (1.4.20)沿 Y 轴力平衡式:)()()(21yyssPPphVrMVrMM (1.4.21)即 )()(21yysPPphMrMV (1.4.22)-.z.绕*轴力矩平衡式:(1.4.23)其中xcI是悬架上质量绕车身重心的纵轴的转动惯量,顾
26、及xsxcIhMI2,得)()()(21hgMCCpDDrIrhVMpIxsrfxzs (1.4.24)由于 221122ryfykPkP (1.4.25)及几何关系:rfErVbErVa21 (1.4.26)得 LpLrIrhVMpIYYYrYphMrMVNNNrNpIrIpxzsxrsrxzz)()(1.4.27)其中)()(2)(2)(2)(22)(2)(2)(22122ghMCCLDDLkYEkEkYkkYVbkakYakNkaEkbENbkakNVbkakNsrfprrffrfrfrfffrrrfrfr (1.4.28)-.z.为了便于上机运算,可令四维向量 rX (1.4.29)为
27、系统的状态变量 则我们就可以把上述微分方程改写成为状态变量*的一阶微分方程 nXCXM (1.4.30)其中 100000000 xsxsrrxzzIhVMIMMIIM (1.4.31)0100000LLhVMYYMVYNNNCpsrr (1.4.32)00YNn (1.4.33)利用上述方程就可以进展汽车角输入操纵稳定性能仿真计算。(d)计算结果参考标准 美国试验平安车操纵稳定性性能要求极其试验方法 汽车操纵稳定性指标限值和评价方法GB/T13047-91-.z.c 仿真计算(a)输入参数列表 表 1.4.6 输入参数 参数名称 参考设计车型 1 整车质量设计载荷 1250kg 簧载质量设计
28、载荷 1121kg 轴距 2548mm 整车重心 至前轴距离 1.086m 整车重心 至后轴距离 1.462m 整车绕 Z 轴 转动惯量 2139kg*m2 悬架上质量绕*轴转动惯量 455kg*m2 悬架上质量绕*Y 轴惯性积 0 前轮侧偏刚度(单轮)23147N/rad 后轮侧偏刚度(单轮)38318N/rad 前轮回正力矩系数 0 后轮回正力矩系数 0 前侧倾 转向系数-0.114-.z.后侧倾 转向系数 0 前侧倾角刚度 47785N/rad 后侧倾角刚度 57525N/rad 前侧倾角阻尼 2311N/rad/s 后侧倾角阻尼 2212N/rad/s 侧倾力臂 0.46m(b)仿真计
29、算条件 车速 v=40,80,110km/h 角阶跃输入0100tttt,并且使汽车的侧向加速度位于0.02g0.4之间。(c)仿真计算结果 车速 V=40km/h 时的操纵稳定性计算结果如图 1.4.12 所示:图 1.4.12 横摆角速度曲线(车速 V=40km/h)图 1.4.13 横摆角速度曲线(车速 V=80km/h)图 1.4.14 横摆角速度曲线(车速 V=120km/h)(d)结果统计与分析 上面三个图就是在不同车速度情况下,*型轿车(以下简称车型 1)作为新设计(以下简称为车型 2)的近似参考车型,汽车角阶跃输入响应曲线,对应的稳定时间也变长,在高速情况下这种趋势更加明显数据
30、具体统计如下表1.4.7:-.z.表 1.4.7 瞬态响应计算结果 指标 速度 超调量 反映时间 稳定时间 车型 1 车型 2 车型 1 车型 2 车型 1 车型 2 V=40km/h 0.24%0.44%0.49s 0.47 S V=80km/h 11.6%12.0%0.21s 0.23s 0.64s 0.74s V=110km/h 39%46%0.15s 0.17s 0.67s 0.8s 从上面表格中的数据根本上可以看出各项指标变化不大,并且都位于美国平安实验车横摆瞬态响应满意区域之内。(3)力阶跃输入响应 a.方程推导(a)符号说明 除了上述角输入运动方程输入的参数之外,还包括如下参数:
31、D:前轮回正力臂。包括主销后倾距与轮胎拖距m sI:转向盘转动惯量kg.m2 I:两前轮绕主销的转动惯量kg.m2 C:转向盘自由时抵抗前轮转角的刚性N.m/rad K:转向盘自由时前轮绕主销转动的当量阻力系数N.m/rad/s:转向柱与 Z 轴的夹角rad i:转向系总传动比 T:转向盘上的驾驶员输入力矩N.m-.z.(b)坐标系统 如以下图所指示,考虑汽车以一定的车速 V 作等速行驶,略去汽车的垂直振动和轮胎挠度的变化,略去空气动力对横向力与力矩的影响,研究驾驶员给转向盘以力指令输入时汽车的操纵运动。与分析角输入运动类似,取一套固定于汽车的相对坐标系统,以整车的重心铅垂线与侧倾轴前后侧倾中
32、心的连线的交点为原点,以汽车的纵向水平轴为*轴。以过原点与*轴垂直的方向为 Y 轴以汽车的左侧方向为正向,过原点的铅垂轴为 Z 轴。这样的坐标取法符合右手定则。在水平平面上的所有角度前轮转角、侧偏角、方位角等及对应的角速度与角加速度均取逆时针方向为正亦符合右手定则而与 Z 轴正向一致。车速向量的增量与 Y 轴的正向一致并成角。在将驾驶员给转向盘的力矩 T 看作输入时,则汽车的运动状态可用四个广义坐标来近似表示:方位角航向角,重心侧偏角,车身侧倾角 与转向盘转角 或参考转向角i。按右手定则,、均以与 Z 轴方向一致为正向。角以与*轴方向一致为正向。侧向力21yyPP、的方向由所假定的前后偏离角2
33、1、的方向确定。因此以与 Y 轴方向相反为正向。(c)方程推导过程 在上述坐标系统中,坐标原点 O 的绝对加速度在 Y 轴方向的投影为:dtdVdtdVYxcos (1.4.34)其中,cosVVx是绝对速度在*轴方向的投影,考虑 不大的情况,VVx,故)()(rVdtddtdVdtdVY (1.4.35)悬架上质量重心的横向绝对加速度在 Y 轴上的投影为;-.z.phrVphYYs )(1.4.36)按达郎贝尔原理,绕 Z 轴力矩平衡式:021yyxzzbPaPpIrI (1.4.37)沿 Y 轴力平衡式:0)()(21yyssPPhprVMVrMM (1.4.38)绕*轴力矩平衡式:(1.
34、4.39)其中,xcI是悬架上质量绕过车身重心的纵轴的转动惯量,顾及2hMIIsxcx,得 0)()()(21hgMCCpDDrIrhVMpIsrfxzsx(1.4.40)绕主销的力矩平衡式:0)sincos(1CkIDPirITys (1.4.41)另外,由几何关系:rfErVbErVa21 (1.4.42)以及轮胎特性:221122ryfykPkP (1.4.43)可以得到如下方程:令六维矢量-.z.rxxxxxxx654321 (1.4.45)为系统状态变量,则上述运动方程式可写成状态变量*的一阶微分方程:iTuxCxM (1.4.46)式中:(1.4.47)022100)(00)(22
35、20)(2222DkVQDkDDhVMkkVbkakMVbkakVkbkaCffrfsrfrfrfrf(1.4.48)(1.4.49)100000n (1.4.50)利用上述方程就可以进展力输入仿真计算。-.z.b 仿真计算(a)参数输入表 表 1.4.8 输入数据 参数名称 车型 1 车型 2 前轮回正力臂 0.087m 0.087m 转向盘转动惯量 0.054kg*m2 0.054kg*m2 前轮绕主销 转动惯量 3.92kg*m2 3.92kg*m2 转向刚度 294N/rad 294N/rad 转向阻尼 0 0 转向柱与 Z 轴夹角 69 度 56 度 转向系统传动比 22.4 22.
36、4(b)仿真计算结果 车速 v=40,80 km/h 力阶跃输入0100ttttT并且侧向加速度g02.04.0之间 图 1.4.15 为速度 V=40km/h 的横摆角速度 图 1.4.15 速度 V=40km/h 的横摆角速度 图 1.4.16 为速度 V=80km/h 的横摆角速度:图 1.4.16 为速度 V=80km/h 的横摆角速度-.z.从上面的计算结果我们可以看出新车相对与原*一车型的超调量和稳定时间都有所加大,有关力阶越输入响应的评价和分析内容,我们将通过如下各个工程的计算来表达。(4)回正能力计算 计算的方法是首先让汽车保持等速圆周运动,然后把加载到方向盘上的作用力突然撤掉
37、,所以这种计算的汽车运动实际上力阶跃输入,因此计算采用 4自由度汽车方向盘力输入模型,汽车初始状态保持侧向加速度为g02.04.0等速圆周运动。方向盘力输入模型如下:图 1.4.17 力阶跃输入 计算结果如下:汽车运动状态为侧向加速度g02.04.0,车速 40km/h,如图 1.4.18。图 1.4.18 为车速 40km/h 的横摆角速度 汽车运动状态为侧向加速度t(s)时间 T (N.m)方向盘输入力-.z.01234567-6-4-202468回 正 性 能 计 算时 间(s)横摆角速度(rad/s)santanasaic g02.04.0,车速 80km/h,如图 1.4.19 所示
38、。图 1.4.19 为车速 80km/h 的横摆角速度 从上面的计算结果我们可以得到如下结论:新的*汽车相对上面*车型的算例而言回正能力有所下降,当时幅度不大,主要表现在回正横摆角速度幅度的收敛速度以及过度时间长度上,尤其是高速时这种表现更加明显。尽管如此,仍然满足美国国家平安性的操纵稳定性能要求及其试验方法的规定,松开方向盘之后2s,在车速 40km/h 的情况下横摆角速度应该等于零,在车速等于 80km/h 的情况下不超过 4o/s(5)撒手稳定性仿真试验 撒手稳定性仿真实际上是力脉冲试验,仿真计算时汽车的运行状态是汽车以恒定的车速行驶,突然给方向盘施加一个力矩输入,然后猛然撒手,其输入为
39、一个力脉冲,具体表示如以下图 1.4.20。-.z.图 1.4.20 方向盘力输入曲线 汽车运动状态为侧向加速度g02.04.0,车速 40km/h,如图 1.4.21。图 1.4.21 为车速 40km/h 的横摆角速度 汽车运动状态为侧向加速度g02.04.0。(6)频率响应 汽车操纵稳定性能频率响应是指方向盘在正弦输入的情况下,频率从0时,汽车横摆角速度与方向盘转角输入之间的关系。对于计算模型而言可以等效为横摆角速度与前轮转角之间的关系。对于操纵稳定性的频域特性要求如下:应有足够宽的通频带,以保证有必要的反响速度和高频反响,但是通频带太宽也会增大对扰动的反响。通常规定幅频特性降至稳态增益
40、=0 处的增益的 70%处的频率为频带宽度。在有效通频带内,幅频特性宜平坦,不宜有明显的选择性谐振峰,以免反响有过大的幅值失真。最大增益与稳态增益的比值越大,说明系统的阻尼越小,超调量越大,过渡时间越长。相频特性要求在有效通频带内相位超前和滞后都尽量小,通常在车速低时出现相位滞后,在车速高时出现相位超前,这两种相位失真都会造成反响的误差。我们采用前面使用的汽车 3 自由度模型进展计算,计算结果如下:方向盘力输入力矩 TN.m 时间 Ts T0 04s-.z.图 1.4.22 两种车型的幅频特性曲线 图 1.4.23 两种车型的相频特性曲线 相关的计算数据总结如下表 1.4.9:表 1.4.9
41、计算结果 f=0 增益 共振频率 共振时增幅比b/a f=0.1Hz 相位角度 f=0.6Hz 相位角(度)通频带宽 车型 1 3.4414s-1 0.54 1.02-6.4-21.3 1.84Hz 车型 2 3.4058s-1 0.54 1.03-6.6-24.9 1.71Hz 从上面的表格中,我们根本上可以得到如下结论:前面的车型(车型 1)与后面设计的*汽车车型(车型 2)在各项指标中根本保持一样,尽管 f=0.6Hz 时的相位角落后比较严重,但是也根本上接近于常标准围26 度到 29 度。另外还需要说明的是尽管车型 1 与车型 2 的共振频率比较低,但是由于 b/a 很小,所以也同样满
42、足要求。-.z.稳态响应 稳态响应衡量参数计算公式 转向灵敏度 21KuLusr (1.4.51)其中:sr;转向横摆角速度增益,1/rad r:横摆动角速度 rad/s:前轮转角 rad u:车速 m/s,为了评价方便取值为 22.35m/s K:转向稳定性能因数 稳定性因数)(122kbkaLmK (1.4.52)其中:sr;转向横摆角速度增益,1/rad r:横摆动角速度 rad/s:前轮转角 rad u:车速 m/s K:转向稳定性能因数 m:整车质量 kg L:轴距 m-.z.a:整车重心到前轴的距离 m b:整车重心到后轴的距离 m 前后轮胎侧偏角度之差 yKLa21 (1.4.5
43、3)其中:1:前轮侧偏角 2:后轮侧偏角 K:转向稳定性因数 L:轴距 ya:侧向加速度,为了评价方便取值 0.4g 根据计算需要,输入参数如表 1.4.10 为:表 1.4.10 输入参数 车型 m L a b 1k 2k 车型 1 1250kg 2.548m 1.086m 1.462m-23147N/rad-38318N/rad 车型 2 1500kg 2.656m 1.231m 1.425m-23147N/rad-38318N/rad 计算结果为表 1.4.11:表 1.4.11 为计算结果 车型 K sr 21 车型 1 0.0034s2/m2 3.51s-1 0.03rad 车型 2
44、 0.0031s2/m3.37s-1 0.031rad-.z.2 从稳态计算结果我们可以看出,新车型的各项指标同原车型指标根本保持一致。并且位于美国试验平安车稳态横摆角速度规定范围之内。美国试验平安车在 80km/h(22.35m/s)时稳态横摆角速度范围在 2.2s-1 到 4.2s-1 之间。临界车速分析 通过上面的稳态操纵稳定性分析,我们可以知道汽车的稳定性因数大于零,所以汽车的参考车速为K1003.0164km/h 开环计算结论分析 综合上述各项计算结果,我们可以得出如下结论:新设计的车型 2 汽车的操纵稳定性同车型 1 汽车的操纵稳定性相比,各项计算指标均有所下降,但是无论是相对数值,还是绝对数值,下降幅度都不大,并且都在各项法规规定范围之内,也就是满足要求。1.4.4 汽车振动与平顺性仿真 1.4.5 大型仿真软件在总体设计中的应用 例如,操纵性和振动分析完全可以应用 大型仿真软件,如 ADAMS 多刚体动力学仿真软件等,有些计算也可用类似于 MATLAB 的软件工具.当然也可以应用一些 CAD/CAE/CAM 软件如 UG,IDEAS,CATIA 及 PROE 软件等.详见后面CAE 与仿真技术应用于汽车设计及其他有关章节.
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
