 旋转变压器基础知识
旋转变压器基础知识

《旋转变压器基础知识》由会员分享,可在线阅读,更多相关《旋转变压器基础知识(10页珍藏版)》请在装配图网上搜索。
1、旋转变压器是一种输出电压随转子转角变化的信号元件。当励磁绕组以一定频率的交流电压励磁时,输 出绕组的电压幅值与转子转角成正弦、余弦函数关系,或保持某一比例关系,或在一定转角范围内与转角成 线性关系。它主要用于坐标变换、三角运算和角度数据传输,也可以作为两相移相器用在角度-数字转换装 置中。按输出电压与转子转角间的函数关系,我所目前主要生产以下三大类旋转变压器:1. 正-余弦旋转变压器(XZ) -其输出电压与转子转角的函数关系成正弦或余弦函数关系。2. 线性旋转变压器(XX)、(XDX) -其输出电压与转子转角成线性函数关系。线性旋转变压器按转子结构又分成隐极式和凸极式两种,前者(XX)实际上也
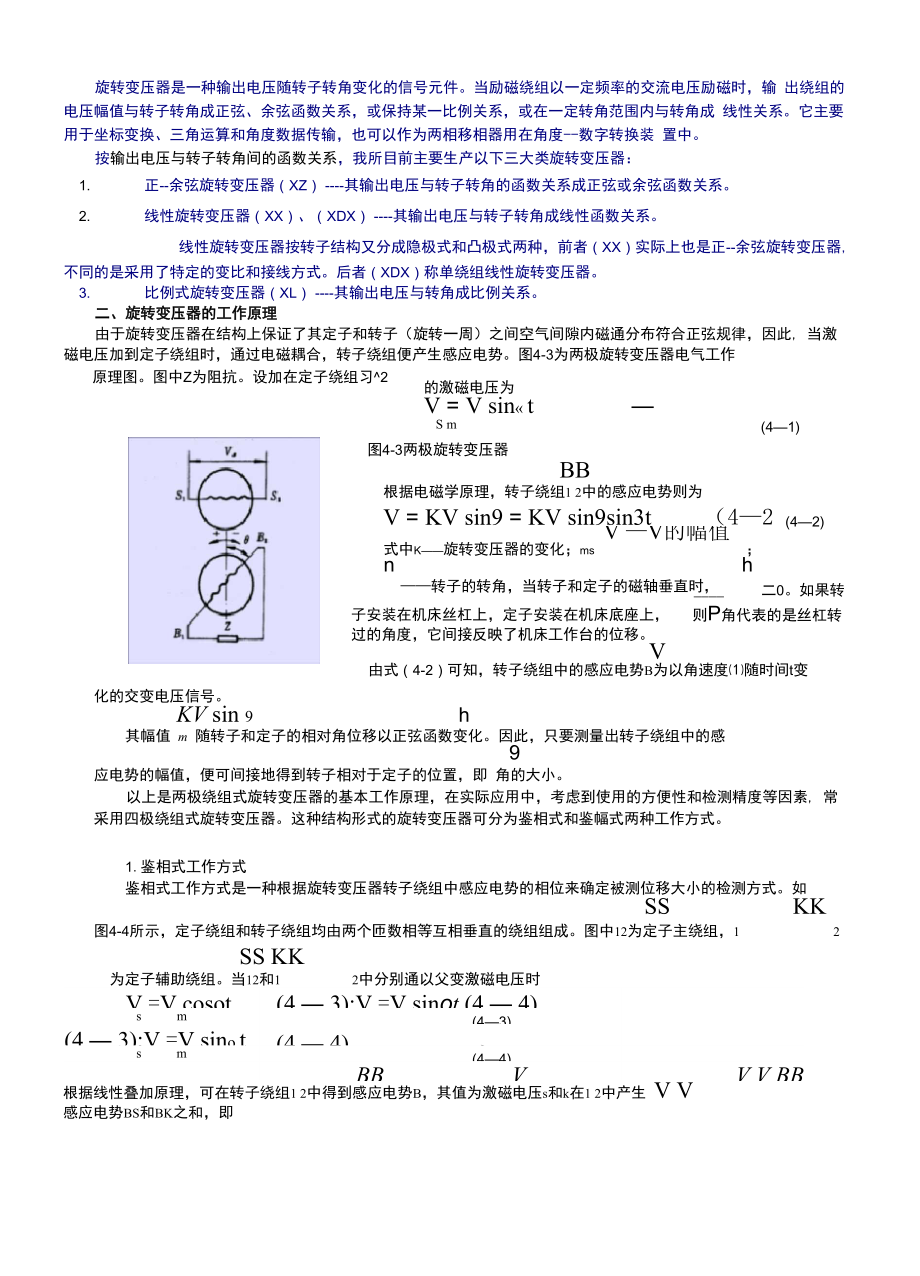
2、是正-余弦旋转变压器,不同的是采用了特定的变比和接线方式。后者(XDX)称单绕组线性旋转变压器。3.比例式旋转变压器(XL) -其输出电压与转角成比例关系。二、旋转变压器的工作原理由于旋转变压器在结构上保证了其定子和转子(旋转一周)之间空气间隙内磁通分布符合正弦规律,因此, 当激磁电压加到定子绕组时,通过电磁耦合,转子绕组便产生感应电势。图4-3为两极旋转变压器电气工作原理图。图中Z为阻抗。设加在定子绕组习2的激磁电压为V = V sin tS m图4-3两极旋转变压器BB根据电磁学原理,转子绕组1 2中的感应电势则为V = KV sin9 = KV sin9sin3t(42)Bsm(41)(
3、42)V V的幅值式中K旋转变压器的变化;ms;nh转子的转角,当转子和定子的磁轴垂直时,子安装在机床丝杠上,定子安装在机床底座上,过的角度,它间接反映了机床工作台的位移。V由式(4-2)可知,转子绕组中的感应电势B为以角速度随时间t变二0。如果转则P角代表的是丝杠转化的交变电压信号。KV sin 9h其幅值 m 随转子和定子的相对角位移以正弦函数变化。因此,只要测量出转子绕组中的感9应电势的幅值,便可间接地得到转子相对于定子的位置,即 角的大小。以上是两极绕组式旋转变压器的基本工作原理,在实际应用中,考虑到使用的方便性和检测精度等因素, 常采用四极绕组式旋转变压器。这种结构形式的旋转变压器可
4、分为鉴相式和鉴幅式两种工作方式。1.鉴相式工作方式鉴相式工作方式是一种根据旋转变压器转子绕组中感应电势的相位来确定被测位移大小的检测方式。如SSKK图4-4所示,定子绕组和转子绕组均由两个匝数相等互相垂直的绕组组成。图中12为定子主绕组,12SS KK为定子辅助绕组。当12和12中分别通以父变激磁电压时V =V cosot(4 3);V =V sinot (4 4)sm(43)(4 3);V =V sino t(4 4),、sm(44)BBVV V BB根据线性叠加原理,可在转子绕组1 2中得到感应电势B,其值为激磁电压s和k在1 2中产生 V V感应电势BS和BK之和,即V 二 V + VB
5、 BS BKV _ V 丄 V二 KV sin(-0) + KV cos 孔 _ bs 十 bk_ -KV cosotsin0 + KV SinpOsi)+ 尺cos =KV ;in(ot-0)(4兰-)mcosPtsin0h5KV sinotcos0m=KV sin(ot-0)(4 5)m图4-4旋转变压器电气工作原理V 由式(44)和(45)可见,旋转变压器转子绕组中的感应电势B与 0 0 定子绕组中的激磁电压同频率,但相位不同,其差值为。而 角正是VV被测位移,故通过比较感应电势B与定子激磁电压信号k的相位,便0 可求出。AA在图44中,转子绕组1 2接一高阻抗,它不作为旋转变压器的测量
6、输出,主要起平衡磁场的作用,目的是为了提高测量精度。2鉴幅式工作方式鉴幅式工作方式是通过对旋转变压器转子绕组中感应电势幅值的检测来实现位移检测的。其工作原理如SS参看图4-4,设定子主绕组1 2和辅助绕组V =V cosa sinots m/ cosa sin ot(4 - 6);V =V sin a sin ots mV cosaV sin a式中m气角。KK12分别输入交变激磁电压(4 - 6);V =V sin a sin ot(4 - 7)46)(4-7)V V分别为激磁电压S和k的幅值(47)a角可以改变,称其为旋转变压器的电下:BBV根据线性叠加原理,得出转子绕组1 2中的感应电势
7、B如下:V尸直计V+尸kv sm-WKV) rpos_ccKV幺-袖诫由駆胡邓加 coftx sin ot cos 0B B BS BSBK bk s skk=KKVinsii-a)-i0ioin o(4-8|4 - 8)a的交变电压信号,我们只要逐渐改变 值, (49)49)(410)mmVKV sin(a-0)I mKV sin(a -0 )=0 这时,因0 = a由式(4-8)可以看出,感应电势B是幅值为V使B的幅值等于零,故可得 :0aV值就是被测角位移的大小。由于 是我们通过对它的逐渐改变,实现使B幅值等于零的,其值自然是应该知道的。三、 旋转变压器的应用a在旋转变压器的鉴相式工作方
8、式中,感应信号1和激磁信号Vk之间的相位差9亀 可通过专用的鉴相器线路检测出来并表示成相应的电压信号,设为U(9),通过测量该电压信号,便可间接地求得9值。但由于%是关于9的周期性函数,U(9)是通过比较和Vk之值获得的,因而它也是关于9的周期性函数,即U(9)=U(n x2n+9)(n = 1,2,3,-)(49)故在实际应用中,不但要测出u(e)的大小,而且还要测出u(e)的周期性变化次数n,或者将被测角位移 9角限制在士n之内。在旋转变压器的鉴幅式工作方式中,VE的幅值设为VBm,由式(4-8)可知(410)它也是关于9的周期性函数,在实际应用中,同样需要将9角限制在士n之内。在这种情况
9、下,若规定和 限制a角只能在-n,n内取值,利用式4-10),便可唯一地确定出9之值。否则,如9=3n/2(n),这时, a=3n/2和a=-n/2都可使 m,从而使9角不能唯一地确定,造成检测结果错误。由上述知,无论是旋转变压器的鉴相式工作方式,还是鉴幅式工作方式,都需要将被测角位移9角限定 在士n之内,只要9在士n之内,就能够被正确地检测出来。事实上,对于被测角位移大于n或小于-n的情况, 如用旋转变压器检测机床丝杠转角的情况,尽管总的机床丝杠转角9可能很大,远远超出限定的士n范围,但 却是机床丝杠转过的若干次小角度9i之和,即N&二妨+角+&n二y目(411)而9i很小,在数控机床上一般
10、不超过3,符合-nw9iwn的要求,旋转变压器及其信号处理线路可以及时 地将它们一一检测出来,并将结果输出。因此,这种检测方式属于动态跟随检测和增量式检测。基于旋转变压器的永磁同步电机高精度位置检测系统永磁同步电动机控制系统的关键技术之一是转子位置的检测,只有检测出转子实际空间位置(绝对位置) 后,控制系统才能决定变频器的通电方式、控制模式及输出电流的频率和相位,以保证永磁同步电动机的正常工 作。因此在采用转子磁场定向控制方式的永磁同步电机控制系统中, 转子位置的精确可靠检测是实现矢量控制 技术的关键。 在常用的光栅编码器、霍尔传感器和旋转变压器等转子位置传感器中, 旋转变压器具有耐高 温、耐
11、湿度、抗冲击性好、抗干扰能力强等突出优点,从而可以精确可靠的产生转子绝对位置信息, 因此适用 于永磁同步电机数字控制系统, 满足其应用系统高性能、高可靠性的要求。 本文提及的永磁同步电机控制系 统使用日本多摩川公司的正余弦转变压器检测电机转子的位置, 采用新型的旋转变压器/数字转换器 ad2s80a 将旋转变压器输出的模拟信号转换为数字信号。分析了ad2s80a的工作原理,设计了位置信号检测电路,并给 出了与数字信号处理器tms320lf2407a的spi通讯接口方法及程序示例。旋转变压器的基本原理 旋转变压器(简称旋变)是一种输出电压随转子转角变化的信号元件。当励磁绕 组以一定频率的交流电压
12、励磁时,输出绕组的电压幅值与转子转角成正、余弦函数关系,这种旋转变压器又 称为正余弦旋转变压器。 在电机控制系统中,用于测量位置信息的旋转变主要是正余弦旋转变压器。本系统 中所采用 的是日本多摩川公司的正余弦旋转变压器。这种旋变由转子和定子绕组构成,并且两者相互独立,一次和二次极线圈都绕在定子上,转子由两组相差90线圈组成,采用无刷设计。图1是其电气示意图卩*0 7匸掘骗亚巾.压图1 旋转变压器电气示意图旋变的输入输出电压之间的具体函数关系如下所示设转子转动角度为e,初级线圈电压(即励磁电压)为:er1-r2二esin2nft式中f励磁频率;e信号幅度。那么输出电压:es1-s3 二 kesi
13、n2nftcos0es2-s4 二 kesin2nftsin6式中k传输比;e转子偏离原点的角度。令e = ,即转子做匀速运动,那么其输出信号的函数曲线图 2 旋转变压器输入输出波形图2中,输出的电压包络信号为为sinwt和coswt,数字转换器就是通过检测这两组输出信号获取旋变 位置信息的。位置检测转换电路设计12ad2s80a 芯片简介ad2s80a 是 ad 公司的 rdc 芯片 ad2s80 系列的一种,具有精度可调、可靠性高、状态和控制信号数字 化、易与微控制器dsp相连等优点,可用于自整角机、旋转变压器、感应同步器的数字转换。其封装形式有 40管脚的dip和44管脚的lcc方形两种
14、。ad2s80a的分辨率有10、12、14、16 bit几种可选,可由引脚sc1和sc2 的逻辑状态来决定。通过选择不同的外接电阻和电容,可得到不同的带宽和跟踪速率。ad2s80a 转换电路的设计由旋转变压器的原理可知,要使旋转变压器正常工作,在其转子端必须施加一个正弦激励。本系统中正弦激磁信号由intersil公司的icl8038芯片产生,根据永磁同步电动机控制系统的实际情况,激磁信号选取为10 khz 的正弦波(即ad2s80a的参考频率),ad2s80a的分辨率选为16 bit,最大跟踪速度为16. 25 r/ s,带宽为600 hzo由这些性能指标,根据公式可以选出外围电路元件。关于计
15、算公式,这里不再叙述。.ICJtZZJF;f 1rX UUlW. AS3-5LIn 駛x: 協览订曇忡監器*157 cFiETI: ;】: 咅趙沽亦花 T x p趟蛀旨图 3 ad2s80a 外围电路连接框图%蛙黑莎LJsr-u.irTrm图3示出旋转变压器/数字变换器(rde)的内部原理框图和外围电路。根据reference i/p引脚引入的正弦信号sin和余弦信号cos以及sin引脚输入的调制信号,实现绝对角度测量由图3可知,ad2s80a作为一个跟踪转换器运行,数码输出能以选取的最大跟踪速率自动跟踪轴角输。因 为它采用一种比率式跟踪方法,输出的数字角度只与输入的sin和cos信号比值有关
16、,而与他们的绝对值无关,故 ad2s80a 对输入信号的幅值和频率变化不敏感,也不必使用精确、稳定的振荡器来产生参考信号。转换环路中 相敏检测器确保了对参考信号中的正交分量有很高的抑制能力。因具有高的噪声抑制比,可以减少从旋转变压 器到转换器rdc远距离长线带来的误差。16条数据线输出口有三态输出数据锁存功能,通过对byte select引脚的控制,可向8 bit或16 bit数据总线传输。位置检测模块与dsp的spi通讯在永磁同步电机的控制系统中,为了简化电路的设计,提高位置信息读取速度,转子位置信号采用spi 串行通讯模式传输到dsp中,而ads2s80a输出的数据为16位的并行数据,为了
17、实现与dsp的spi通讯,需 要把ads2s80a输出的并行数据转化为串行数据。并行数据转串行数据并行数据转化为串行数据通过74hc165芯片实现。此款芯片同时只能转换8位数据,而ad2s80a输出的数 据为16位,从而需要将两片74hc165进行级联以实现16位并行数据转化为串行数据输出。74hc165的数据 传输时序图如图 4所示。图 4 7hc165 数据输出时序图由图4可以看出,当clkinh为高电平时,数据不能输出,当clkinh变为低电平后,在下一个脉冲的上升沿,数据才移位输出。并且,当sh/ld为低平时,并口输出的数据被采集进来,当其变为高电平后,数据被锁存。从而可以用一反相器将
18、clk inh的输入信号反相后再接入sh/ld,这样当clk inh为高电平时,并口输出的数据被采集到片内,当clki nh为低电平后,在下一个脉冲上升沿,数据开始移位输出,而clki nh可以作 为 spi 通讯的片选信号。spi 通讯的实现dsp 与位置信号检测模块进行 spi 通讯时,采用从模式,通讯时钟由位置检测模块提供3,本系统中 时 钟 频 率 为 1mhz 。 图 5 给 出 了 dsp 与 位 置 检 测 模 块 spi 通 讯 连 接 示 意 图 。图5位置检测模块与dsp的连接示意图由于dsp的spi通讯模式为从模式,dsp接收数据时需要先被选通,本系统中通过一个i/o 口
19、,给spitie 个低电平选通dsp,同时,由于clkinh也变为低电平,74hc165开始串行移位输出采集的并行数据,数据传 输完毕,再给spite 个高电平,停止接收数据,同时74hc165开始采集ad2s80a输出的并行数据。这样就 实现了 dsp与位置检测模块的spi通讯。需要注意的一个问题是,在进行spi通信时,数据采集的时序可能不同步,即dsp接受的数据与实际值相比,向右或左平移一位。为了防止数据丢失,可以进行如下处理:在选通 dsp 的片选信号之前,可以先检测74hc165的脉冲信号,在检测到此脉冲的下降沿后,延时大约一个脉冲周期后,再选通dsp,在这样的一个脉冲之后的下一个上升
20、沿,数据开始往dsp的spi 口传送,这样dsp接收的数据就不会发生移位现象。下面给出一个dsp与位置检测模块spi通讯的参考程序段:设置 spildp #OeOh;设置 iopc3 作为;spiteor #0808hsacl pcdatdirldp #0e0hsplk #000fh,spiccrsplk #00000010b,spictlsplk #008fh,spiccrspi 通信spi_wait:ldp #0e1h;检测脉冲下降沿lacc pfdatdirand #0000000001000000bbcnd spi_wait,neqrpt #40;延时一个脉冲周期nop ;根据不同的脉
21、冲;选择不同的值lacc pcdatdir;选通 dspand #1111111111110111bsacl pcdatdir ldp #0e0hspi_rdy bitspists,bit6bcnd spi_rdy,ntcldp #pcdatdir7laccpcdatdiror #0000000000001000bsaclpcdatdirldp #0e0hlaccspirxbu输出位置信号ldp #6saclpositon结语本文介绍了旋转变压器的工作原理,并对高精度旋转变压器转换器芯片 ad280a 、 外围电路设计进行 了详细的介绍,并详细介绍了 ad2s80a输出的并数据转串数据及其与高速数字信号处理器tms320lf2407a 进行的spi通讯。这种位置信号检测电路用到永磁同步电动机控制系统电构成了一种高精度、高可靠性的位 置检测单元。实际运行结果表明:该方法精度高、所用器件体积小、抗干扰能力强、有较高的可靠性,特别适用 于恶劣环境的位置检测系统中,具有很高的应用价值
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
