 永磁同步电机的原理及结构要点
永磁同步电机的原理及结构要点

《永磁同步电机的原理及结构要点》由会员分享,可在线阅读,更多相关《永磁同步电机的原理及结构要点(29页珍藏版)》请在装配图网上搜索。
1、第一章永磁同步电机的原理及结构1.1 永磁同步电机的基本工作原理永磁同步电机的原理如下在电动机的定子绕组中通入三相电流,在通入电流后 就会在电动机的定子绕组中形成旋转磁场,由于在转子上安装了永磁体,永磁体的磁 极是固定的,根据磁极的同性相吸异性相斥的原理,在定子中产生的旋转磁场会带动 转子进行旋转,最终达到转子的旋转速度与定子中产生的旋转磁极的转速相等,所以 可以把永磁同步电机的起动过程看成是由异步启动阶段和牵入同步阶段组成的。在异 步启动的研究阶段中,电动机的转速是从零开始逐渐增大的,造成上诉的主要原因是 其在异步转矩、永磁发电制动转矩、由转子磁路不对称而引起的磁阻转矩和单轴转矩 等一系列的
2、因素共同作用下而引起的,所以在这个过程中转速是振荡着上升的。在起 动过程中,只有异步转矩是驱动性质的转矩,电动机就是以这转矩来得以加速的,其 他的转矩大部分以制动性质为主。在电动机的速度由零增加到接近定子的磁场旋转转 速时,在永磁体脉振转矩的影响下永磁同步电机的转速有可能会超过同步转速,而出 现转速的超调现象。但经过一段时间的转速振荡后,最终在同步转矩的作用下而被牵 入同步。1.2 永磁同步电机的结构永磁同步电机主要是由转子、端盖、及定子等各部件组成的。一般来说,永磁 同步电机的最大的特点是它的定子结构与普通的感应电机的结构非常非常的相似,主 要是区别于转子的独特的结构与其它电机形成了差别。和
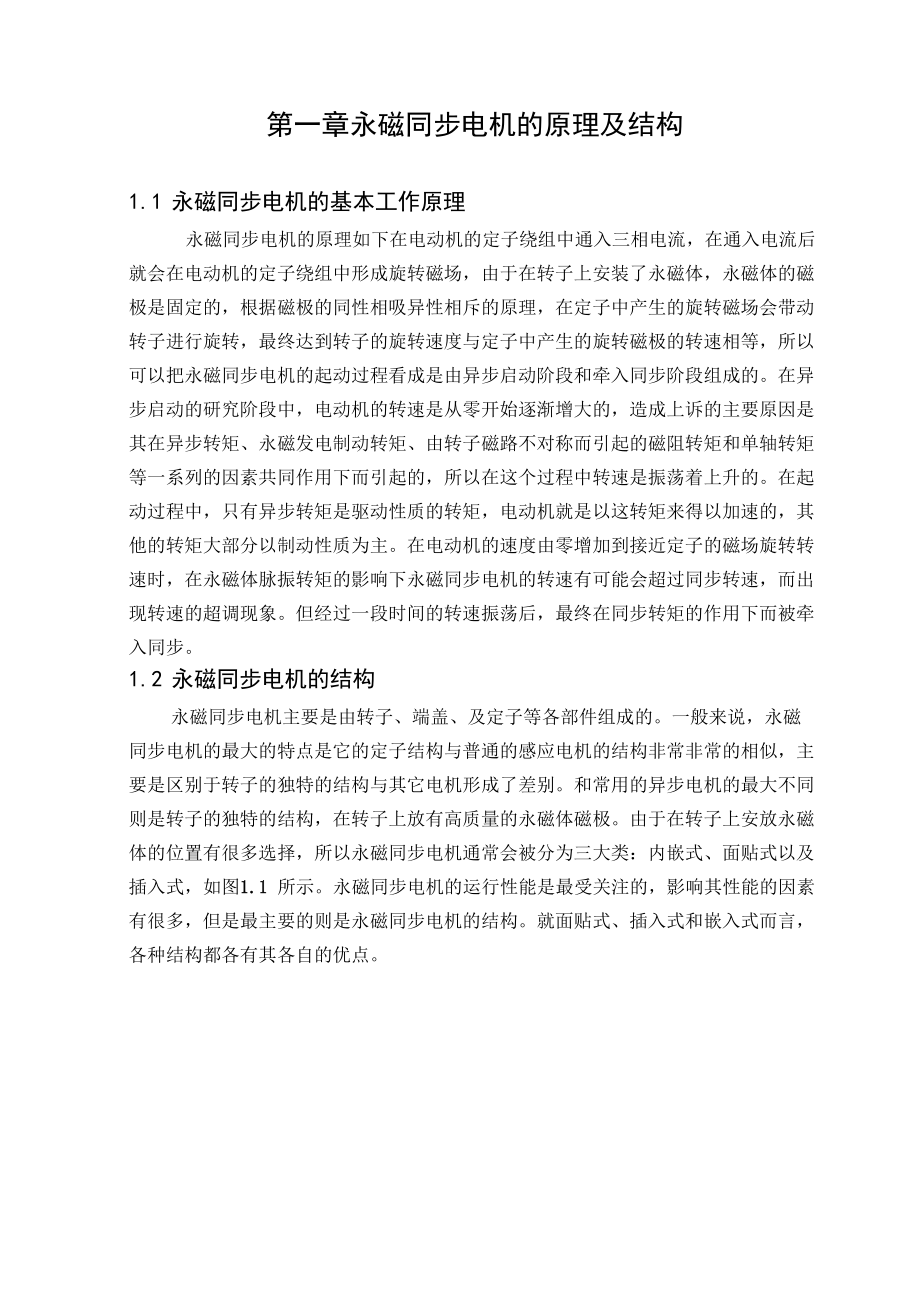
3、常用的异步电机的最大不同 则是转子的独特的结构,在转子上放有高质量的永磁体磁极。由于在转子上安放永磁 体的位置有很多选择,所以永磁同步电机通常会被分为三大类:内嵌式、面贴式以及 插入式,如图1.1 所示。永磁同步电机的运行性能是最受关注的,影响其性能的因素 有很多,但是最主要的则是永磁同步电机的结构。就面贴式、插入式和嵌入式而言, 各种结构都各有其各自的优点。a)面贴或b)插入式c)内嵌式图1-1面贴式的永磁同步电机在工业上是应用最广泛的,其最主要的原因是其拥有很多 其他形式电机无法比拟的优点,例如其制造方便,转动惯性比较小以及结构很简单等。 并且这种类型的永磁同步电机更加容易被设计师来进行对
4、其的优化设计,其中最主要 的方法是把气隙磁链的分布结构设计成近似正弦的分布,将其分布结构改成正弦分 布后能够带来很多的优势,例如能减小磁场的谐波以及它所带来的负面效应,应用以 上的方法能够很好的改善电机的运行性能。插入式结构的电机之所以能够跟面贴式的 电机相比较有很大的改善是因为它充分的利用了它设计出的磁链的结构有着不对称 性所生成的独特的磁阻转矩能大大的提高了电机的功率密度,并且在也能很方便的制 造出来,所以永磁同步电机的这种结构被比较多的应用于在传动系统中,但是其缺点 也是很突出的,例如制作成本和漏磁系数与面贴式的相比较都要大的多。嵌入式的永 磁同步电机中的永磁体是被安置在转子的内部,相比
5、较而言其结构虽然比较复杂,但 却有几个很明显的优点是毋庸置疑的,因为有高气隙的磁通密度,所以很明显的它 跟面贴式的电机相比较就会产生很大的转矩;因为在转子永磁体的安装方式是选择嵌 入式的,所以永磁体在被去磁后所带来的一系列的危险的可能性就会很小,因此电机 能够在更高的旋转速度下运行但是并不需要考虑转子中永磁体是否会因为离心力过 大而被破坏。为了体现永磁同步电机的优越性能,与传统异步电机来进行比较,永磁同步电机 特别是最常用的稀土式的永磁同步电机具有结构简单,运行可靠性很高;体积非常的 小,质量特别的轻;损耗也相对较少,效率也比较高;电机的形状以及大小可以灵活 多样的变化等比较明显的优点。正是因
6、为其拥有这么多的优势所以其应用范围非常的 广泛,几乎遍及航空航天、国防、工农业的生产和日常生活等的各个领域。永磁同步 电动机与感应电动机相比,可以考虑不输入无功励磁电流,因此可以非常明显的提高其功率因素,进而减少了定子上的电流以及定子上电阻的损耗,而且在稳定运行的时 候没有转子电阻上的损耗,进而可以因总损耗的降低而减小风扇(小容量的电机甚至 可以不用风扇)以及相应的风磨损耗,从而与同规格的感应电动机相比较其效率可以 提高2-8个百分点。1.3 永磁同步电机的数学特性先对永磁同步电机的转速进行研究,在分析定子和转子的磁动势间的转速关系 时,假定转子的转速为nrpmin,所以转子的磁动势相应的转速
7、也为nr/min,所以定 子的电流相应的频率是f= 60 ,因为定子旋转的磁动势的旋转速度是由定子上的电流 产生的,所以应为60 f 60 pn二=n(1.1)pp 60可以看出转子的旋转速度是与定子的磁动势的转速相等的。对于永磁同步电机的电压特性研究,可以利用电动机的惯例来直接写出它的电动势平衡方程式U = E + jI x + jIx0 d d q q (1.2)对于永磁同步电机的功率而言,同样根据发电机的惯例能够得到永磁同步电机的电磁功率为PM=mUE sino + mxdsin2o1.3)对于永磁同步电机的转矩而言,在恒定的转速Q下,转矩和功率是成正比的,所以可以得到以下公式P mUE
8、 .T = m =o sino +B Q xsin251.4)1 1 d第二章 永磁同步电机物理模型开环仿真2.1 永磁同步电机模块及仿真 下面对永磁同步电机物理模型的开环进行仿真,在仿真之前先介绍各个单元模 块,以便于对模型进行更好的仿真。2.1.1 物理单元模块 逆变器单元,逆变是和整流相对应的,它的主要功能是把直流电转变成交流电 逆变可以被分为两类,包括有源逆变以及无源逆变。其中有源逆变的定义为当交流侧 连接电网时,称之为有源逆变;当负载直接与交流侧相连时,称之为无源逆变。以图 2-1的单相桥式逆变电路的例子来说明逆变器的工作原理。图 2-1 逆变电路图 2-1 中 S1-S4 为桥式电
9、路的 4 个臂,它们是由电力电子器件及其辅助电路组成的。当开关si、S4闭合,S2、S3断开时,负载电压u为正;当SI、S4断开,S2、0S3闭合时,u为负,其波形如图2-2所示。0io图 2-2 逆变电路波形通过这个方法,就可以把直流电转变成交流电,只要改变两组开关相应的切换频 率,就可以改变交流电的输出频率。这就是逆变器的工作原理。当负载是电阻时,负载电流i和电压u的波形是相同的,相位也相同。当负载00是阻感时,i的基波相位滞后于u的基波,两者波形的形状也不同,图2-2给出的 00是阻感负载时的i的波形。设寸刻断开SI、S4,同时合上S2、S3,则u的极性 0 1 0立刻变为负的。但是,正
10、是因为负载中存在着电感,其中的电流极性仍将维持原来的 方向而不能立刻改变。这时负载电流会从直流电源负极而流出,经过S2、负载和S3 再流回正极,负载电感中储存的能量会向直流电源发出反馈信号,负载电流要逐渐减 小,到J时刻降到零,之后i才开始并反向增大。S2、S3断开,SI、S4闭合时的20情况类似。上面是S1-S4均为理想开关时的分析,实际电路的工作过程要比这更复杂 一些。逆变电路根据直流侧电源性质的不同可以被分为两种:直流侧为电压源的称为电 压型逆变电路;直流侧为电流源的称为电流型逆变电路。它们也分别被称为电压源逆 变电路和电流源逆变电路。三相电压型逆变电路是由三个单相逆变电路而组成的。在三
11、相逆变电路中三相桥 式逆变电路应用的最为广泛。 如图 2-3 所示的三相电压型桥式逆变电路 是采用IGBT作为开关器件的,因此可以很明显的看出它是由三个半桥逆变电路组成 的。如图2-3 所示的电路的直流侧一般只用一个电容器就可以了,但是为了方便分析,画出 了串联的两个电容器并且标出假想的中点N,单相半桥和全桥逆变电路是具有很多相似点的, 三相电压型桥式逆变电路也是以 180 度的导电方式作为其基本的工作方式,同一半桥上下两 个臂交替着导电,每相之间开始导电的角度以 120 度相错开。这样在任何时候,将会有三个 桥臂同时导通。也可能是上面一个下面两个,也可能是上面两个下面一个同时导通。它之所 以
12、被称为纵向换流是因为每次换流都是在同一相上的两个桥臂之间互换进行。逆变器的参数设置如图 2-4 所示Block Parameters: Univereal BridgeThis block inplezient a bridge of aele-cted p-c-iFei ele-cti-anigs deviG&s. Seties RC snubbe-T circuits are Eormected in p3.i且llwl with each switch device. Fr&ee He-lp E-dtgnuttx valuss 话hw:n ths ss-del is di Eph sss
13、t aplicatisns thsint Emal i n dust ano e- L&n 口 dic-des aad. thyTis tnis should be- e:已七 to- estoAjjplr图2-4逆变器模块参数设置六路脉冲触发器模块,如图2-5所示Synch ran ized5-Pulse GeneratorI1ABBCCAElok图2-5六路脉冲触发器模块同步六路脉冲发生器模块可用于很多领域。六路脉冲触发器的主要部分是六个晶闸管。该 模块的输出是一个六脉冲单独同步的六晶闸管电压矢量。下面的图表显示了一个0度的a角 的六路脉冲。如图2-6所示图2-6六路脉冲触发器输出的脉冲a
14、ipha_deg输入一个 发射信号,以度的形式。该输入可以连接到一个恒定的模块或者它可以连 接到控制系统来控制发电机的脉冲AB、 BC、 CA为输入的ABC三相的线电压Freq频率的输入端口,这种输入应该连接到包含在赫兹的基本频率,恒定的模块。Block六路脉冲触发器的参数设置如图2-7所示耳 Function block P-arameters; Synchronized 5-PuIse Gene-raterSynchx-Dnizd _pulna百k; Link.Uee th.ia blo-ck. X.Q- fthe thyxiaf m _pulie envextex. The output
15、 is a. vsctot of E pulsSE (0-L, imdividually eynz:hrorized an th.e o&soLLtatio-n vn-ltase-5. Pulses are eneTsted alnha dsErses after th.e in.cxeasin.g ae;i3-ci-aEinff of ths u罟工lleQueriDT of STnEJiT-nniatian vaLtaces :盂;:ParazLe 七e:eOKZ anc elHelpA&d-Is图2-7六路脉冲触发器参数设置2.1.2永磁同步电机模型仿真结果本文在基于Matlab下建立了
16、永磁同步电机的开环电机模型的仿真。PMSM的参数设定为:电机的额定电压为220V,额定电流为3A,额定机械转速为 3000 rpm,极对数为2,电磁输出功率为900W,定子阻抗为4.3Q,直轴感抗为0.027H, 交轴感抗为0.067H,漏磁通入f为0.272wb,转动惯量J为0.00179kgm2,粘滞摩擦系 数B为0。得到的仿真结果图如图2-9所示图 2-9 电机转速曲线从图中的曲线可以看出,电机转速给定值为3000N (pm),从电机起动开始,速度逐渐 上升,达到给定值需要的时间比较长,换句话说就是电机的响应时间较长,而且在达到稳定 值附近时的转速波动也比较大,可能是因为永磁同步电机的内
17、部结构很复杂,也可能是跟电 机没有任何控制有关,希望在搭建了速度转矩双闭环控制后的转速的响应时间能缩短,达到 给定值附近时的上下波动能减小转矩的结果如图 2-10所示图 2-10 永磁同步电机转矩曲线从图中可以看出,在永磁同步电机起动后转矩的值在零的附近波动,波动范围还 是比较大,产生波动的主要原因还是电机复杂的内部结构,以及在没有任何控制的情 况下才出现的,希望在搭建成速度转矩双闭环控制下可以使其波动的范围减小,无限 的接近于零。电流的仿真结果如图 2-11 所示图 2-11 永磁同步电机电流曲线对于永磁同步电机开环物理模型仿真的电流,电流在电机开始运行时电流会在短时间内上升并振荡,但很快就
18、接近与零值并且在零值附近波动。第三章 永磁同步电机双闭环仿真3.1永磁同步电机双闭环仿真模型在MATLAB下的SIMULINK环境中,利用其中的各种模块,建立了永磁同步电机 双闭环控制系统仿真模型。该系统是由PI控制器构成的速度环和滞环电流控制器建 立的电流环共同控制的双闭环控制系统。通过给定转速与实际转速的比较产生的误 差,将产生的误差信号送入PI控制器,再由PI控制器送达转速控制模块。并通过坐 标变换产生的参考电流,与PMSM输出的实际电流相比较,再通过桥路逆变器产生输 入PMSM的三相电压,经过坐标变换后直接输入到PMSM本体控制其运行。最终达到在 利用双闭环控制系统的控制下能够实现实际
19、转速与期望转速相一致的目的。根据模块化的思想,我们可以将系统的整体结构划分为以下几个主要部分:PMSM电机本体模块,转速控制模块,转矩控制模块,坐标变换模块,电流控制模块,电压逆变模块 。3.1.1 PMSM本体模块在整个仿真过程中,电机本体模块是其中最重要的模块之一。根据公式可得到永磁同步电机的机械转速以及电子转速公式:(T - T - B )eLo(3.1)I J 丿(P为极对数)(3.2)则可以建立如下的电机本体模块,如图3-2所示:in 1LqSumLd.s+RsTransfer Fenidout 1TLin 3LqProduct2in 2Sum 1Product 1Lq.s+RsTr
20、ansfer Fcn1Ldiqout 2SumLq LqYfYfLdProduct 2Sum 3-K-K-Ld LaYf1.5*p1out 3t*P1/J1/sL1Sum 4IntegratorSwitch1/JYf1out_41/s-pos.wr=0 if wroIntegratorout 5-Yd6-Yqout 7out 6图3-1 PMSM电机本体模块3.1.2转速控制模块转速控制模块是由比例积分控制器根据比例积分控制原理建立的,如图3-3所 示的比例积分PI控制模块。在本体模块中取的比例积分为0.5,积分增益为0.01, 定子电流输出的限幅为-5,5。图3-2 PI控制模块3.1.3
21、转矩控制模块本次仿真是以常量转矩控制为转速控制的方式,即当实际转速小于额定的转速冰*时,取交轴期望电流iq与提供的定子电流1 *相等,而直轴的期望电流d大小为0, qsd角a =90o。则i(3.3)fq由此可以看出转矩与电机交轴电流之间存在一定的线性关系。在仿真过程中是由 程序实现的,转矩控制模块也是根据以上的原理建立的。3.1.4 坐标变换模块在仿真中,主要有 4 个坐标变换的模块:两相旋转坐标系向两相静止坐标系变 换(dq到 0),两相静止的坐标系向三相坐标是变换(a 卩到abc),以 及三相坐标系向两相静止坐标系变换(abc到a 卩),两相静止坐标系向两相旋转 坐标变换(a 卩到dq)
22、,同类变换的电压 和电流变换式相同。相应的坐标变换公式如下所示:两相旋转坐标系向静止坐标系变换:i = i cos 0 - i sin 0a dq(3.4)i = i sin 0 + i cos 00 dq( 3.5 )两相静止坐标系向三相坐标系变换:i = i + ia 0 a(3.6)(3.7)3.8)相应的反变换为:(3.9)3.10)(3.11)3.12)i = i cos 0 + i sin 0da卩i 二一i sin 0 + i cos 0q aB根据坐标变化公式()可以建立如图 3-3、图 3-4、图 3-5、图 3-6 的坐标 变换模块。图3-3 d-q至妆-卩坐标变换图34
23、ap到abc坐标变换图35 abc到ap坐标变换图36 ap到dq坐标变换3.1.5 电流控制模块 对于电流控制方式而言,采用的是滞环控制。首先确定一个期望值,根据滞环 的带快要在期望值的两侧来确定一个范围,当实际输出电流达到滞环宽度以上的时 候,就会输出高值信号,从而达到对输出电流调节的目的。滞环控制器的模块是根据滞环控制原理搭建的,如图 3-7 所示。在图 3-7 中首 先将实际电流与期望电流进行比较后产生误差,再经过滞环控制器后产生三相电压信 号。然后经过数据逻辑非运算器器件和类型变换装置产生IGBT桥路6个IGBT管的门 极脉冲信号。因同一相上的桥臂的管子触发脉冲是相反的,所以只要在原
24、来的三相脉 冲信号上加上逻辑非即可构成相应的6路脉冲触发信号,控制各个IGBT管的导通以 及关闭。在本次仿真中,滞环的宽度设为 0.1 当期望电流与实际电流的误差不小于滞环 带的宽度时,滞环控制器即开通,输出值为1,当误差小于滞环宽度的负值时,滞环3.1.6 电压逆变器模块电压源逆变器如图 3-8 所示,根据3.1.5 小结小节中我们研究的电流控制器,它 能够产生出IGBT的门极信号,并且通过这个信号来控制每个IGBT管的导通以及关 断。由直流电源产生的三相电流与三相实际电流值同时作用在负载上,根据误差的大 小来产生输入到PMSM的三相电压Vabc,通过这个产生出来的三相电压来调节 PMSM
25、的实际转速也能同时调节交直轴的电流,最终达到实际值与期望值相等的目 的。这个逆变桥的IGBT管是选用的IRGIB10B60KD1。为了得到相对更好的电流波 形,要在IGBT桥路三相电流输出端加上一个滤波器,右边的负载电阻全取为1,直流电压为20V,左下角独立的部分是IGBT桥路中流经IGBT管的电流以及电压的测量装置,可通过它得到流经每个IGBT管的电压和电流,要想得到IGBT管上的损 耗功率只需将同一个IGBT管的电压电流和电压相乘即可,要想得到在一段时间内单 个IGBT管上的消耗功率的总和,可以在功率输出端放上一个积分器输出值即可得到。图 38 电压逆变器结构3.2 仿真结果gate si
26、gnalilfabetagate signalTo Workspace2Sample and holdSampling blockratedspeedReference speed rac/sdq alfabe taalfa-be ta tet a,idiqalfarbetaalfarbeta-dq teta ialfaibe taProduct 1To Workspace4PM-SM图 3-9 整体仿真框图本文基于MATLAB中的SIMULINK建立出了永磁同步电机的双闭环控制系统的电 机模型,这是一种新的电压变换结构及电流控制方法,以此方法为基础对此双闭环模 型进行了实际的仿真。PMSM的
27、参数设定如下:电机的额定电压为220V,额定电流为 3A,额定机械转速为1700rpm,极对数为2,电磁输出功率为900W,定子阻抗4.3Q, 直轴感抗为0.027H,交轴感抗0.067H。漏磁通九f为0.272wb,转动惯量J为 0.00179kgm2,粘滞摩擦系数B为0.本次仿真就是为了验证所设计的PMSM双闭环控制系统的仿真模型的静、动态性 能是否得到改善,是否达到预想的结果以及系统空载启动的性能是否良好它的优越性 能否体现出来,系统先是在空载情况下启动,在t=0.4s时突加负载2Nm,可以得到 系统转速、转矩、直轴交轴电流以及A相电流的仿真曲线。给定参考转速为200rad/s,滞环宽度
28、取为0.1。Time 口ffset:图 3-10 永磁同步电机双闭环控制转速图 3.11 永磁同步电机双闭环控制转矩图 3.12 永磁同步电机双闭环 i 电流曲线 q图 3.13 永磁同步电机双闭环 i 电流曲线 d图3.14永磁同步电机双闭环i电流曲线通过上面的仿真图可以很明显的看出:在给定的参考转速不变的情况下,系统从 接收到信号到能够响应需要的时间很短并且上下的波动不是很大总体来看还是很平 稳的,在起动阶段系统是保持转速恒定的,并且在空载稳定速度下运行时,不考虑系 统的摩擦转矩,因此此时的电磁转矩的平均值为零,交轴和直轴电流以及相电流的平 均值也接近为零。在突然加上负载后,转速发生了突然
29、的下降,但是又能比较快的恢 复到稳定的状态,稳态运行时转速没有静差,但突然加上负载后,电磁转矩就会略有 增大,这是由于开关的频繁切换所造成的。稳态时,电磁转矩等于负载转矩,直轴电 流的平均值为零,交轴电流均值增大,相电流为正弦波形,这很符合永磁同步电机的 特性。仿真结果表明电机的动静态性能比较好,得到仿真之前预期的目的,说明建模 仿真的方法是比较理想的,是正确的。第四章 永磁同步电机开环和双闭环仿真比较通过第二章的研究和分析,可以看出永磁同步电机在开环的运行形式下,得到的 转矩、电流、转速的波形跟我们想要的效果有很大的差距,其中会出现从起动开始, 达到稳定的时间比较长,而且到达稳定时的效果也比
30、较差,波形很明显。这主要是由 于开环运行的条件下系统普遍存在的问题较多(1)在开环系统中,各种参数间相互之间影响并且互相制约着,所以很难再对调 节器的参数进行更好的调整,因而系统的动态性能的缺陷很明显,在这种情况下不是 很理想。(2)任何扰动在转速出现偏差后也无法调整,因而转速动态降落较大。 相对开环来讲在第三章研究的永磁同步电机的双闭环控制系统就对电机调节的 优势就很明显,如仿真结果表明:对永磁同步电机双闭环控制系统的仿真结果进行波 形分析,可以很清楚的看到其的合理性,并且系统能够在非常平稳的状态下运行,跟 开环控制系统相比较而言它具有较好的静、动态特性,能够达到我们所期望的目的。 所以我们
31、可以得出以下结论,采用该 PMSM 双闭环控制系统模型仿真,可以非常便捷 地观察出它和开环情况下永磁同步电机相比较的优越性,实现同时也能很准确的验证 其算法是否合理,只需要对其中一部分的功能模块进行替换或者是合理的适当的修 改,就能够实现对控制策略的更换或改进,不仅可以间断对方案的设计周期进行控制, 而且还能快速验证所设计的控制算法是否正确是否合理,更优越的地方是能够充分地 利用计算机仿真的优越性。通过修改系统的参数变量或人为的加入不同扰动因素来考 察在各种不同的试验条件下电机系统的动、静态性能,或者是模拟相同的试验条件, 通过各种参数或者不同的波形来比较不同的控制策略的优势和劣势,为分析和设
32、计不 同的永磁同步电机控制系统提供了更为有效的手段和工具,也给为了实际电机控制系 统的设计以及调试提供了新的思路。在双闭环系统中应用到了直接转矩控制原理。直接转矩控制是近几年来继矢量控 制技术之后发展起来的一种具有高性能的一种新型的交流变频调速技术。 1985 年由 德国鲁尔大学Depenbrock教授第一次提出了基于六边形磁链的直接转矩控制理论, 1986年日本学者Takahashi提出了基于圆形磁链的直接转矩控制理论,紧接着1987 年在弱磁调速范围为涉及到了它。不同于矢量控制技术,直接转矩控制自己的特点是 很突出的。在矢量控制中遇到的计算复杂、特性易受电动机的参数变化所影响、实际 性能很
33、难达到理论分析结果等问题在直接转矩控制中得到了很大程度的改善。直接转 矩控制技术一诞生,它就以自己新颖的控制思路,简洁明了的系统结构,良好的静、 动态性能而受到了人们普遍的注意,因而得到迅速的发展。目前该技术已成功的应用 到了电力机车的牵引以及提升机等大功率交流传动上。ABB公司已将直接转矩控制的 变频器投放到了市场上。直接转矩控制的思想是想要直接控制电机的电磁转矩要来控制定子的磁链的方 法,不像矢量控制那样,要通过电流来控制它的电磁转矩,而是在定子坐标系下观测 电机的定子磁链和电磁转矩,并将磁链、转矩的观测值拿来与参考值经两个滞环比较 强后得到的磁链、转矩控制信号,综合考虑定子磁链的位置,要
34、有开关选择适当的电 压空间矢量,控制定子磁链的走向,从而来控制转矩13。和矢量控制相比较,它的优 点在于它抛开了矢量控制中的复杂的思想,直接对电机的磁链和转矩进行控制,并用 定子的磁链方向来代替转子磁链的方向,从而避开了电机中不易确定的参数3。通过本次的毕业设计,使我把从课本里学到的东西以及课本以外的知识联系在了 一起,在本次的毕业设计中我从最基本的对永磁同步电机的基本结构、工作原理等开 始研究,通过查阅大量的书籍资料,使我获得了在本课题之外的很多知识,在此期间 虽然遇到了很多的问题,但是对于我来说这是一种动力,能够促使我更多的学习相关 的知识,使我对永磁同步电机才能有更深入的了解,在做毕业设
35、计的过程中才能得心 应手。做毕业设计的过程中以永磁同步电机的开环仿真作为基础,最终搭建出对永磁 同步电机的双闭环控制,使其发挥出其最好的性能,并与其开环时的电机性能进行对 比,观察出双闭环控制系统对电机有效控制,达到我们预期和想要的目的。现代的社会中,电力电子技术、微电子技术、以及电机控制理论等都迅速的发展 起来,正是因为以上的发展,才使得永磁同步电机能够更好的被深入研究,以及最终 达到广泛的应用。虽然本次毕业设计对永磁同步电机的性能做出了一些改善,得到了一些有意义的 成果,但是由于本人的能力有限,还需要进一步的学习和研究。比如关于永磁同步电 机的一系列难题,以及它的局限性,都是需要得到更多的学者来进行研究,最后希望 永磁同步电机有个更好的明天。
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
