 红外探测系统
红外探测系统

《红外探测系统》由会员分享,可在线阅读,更多相关《红外探测系统(26页珍藏版)》请在装配图网上搜索。
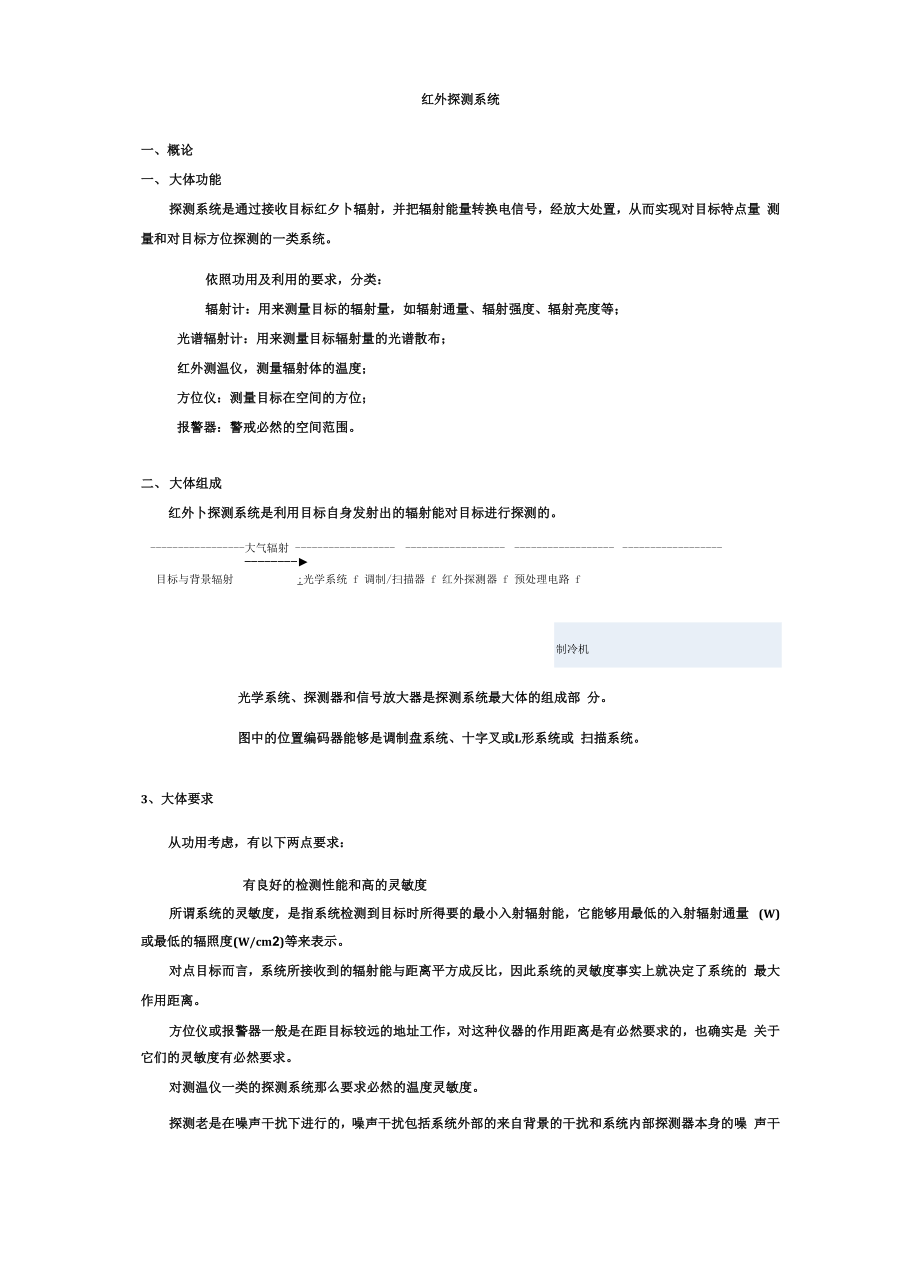
1、红外探测系统一、概论一、大体功能探测系统是通过接收目标红夕卜辐射,并把辐射能量转换电信号,经放大处置,从而实现对目标特点量 测量和对目标方位探测的一类系统。依照功用及利用的要求,分类:辐射计:用来测量目标的辐射量,如辐射通量、辐射强度、辐射亮度等;光谱辐射计:用来测量目标辐射量的光谱散布;红外测温仪,测量辐射体的温度;方位仪:测量目标在空间的方位;报警器:警戒必然的空间范围。二、大体组成红外卜探测系统是利用目标自身发射出的辐射能对目标进行探测的。大气辐射 目标与背景辐射;光学系统 f 调制/扫描器 f 红外探测器 f 预处理电路 f制冷机光学系统、探测器和信号放大器是探测系统最大体的组成部 分
2、。图中的位置编码器能够是调制盘系统、十字叉或L形系统或 扫描系统。3、大体要求从功用考虑,有以下两点要求:有良好的检测性能和高的灵敏度所谓系统的灵敏度,是指系统检测到目标时所得要的最小入射辐射能,它能够用最低的入射辐射通量 (W)或最低的辐照度(W/cm2)等来表示。对点目标而言,系统所接收到的辐射能与距离平方成反比,因此系统的灵敏度事实上就决定了系统的 最大作用距离。方位仪或报警器一般是在距目标较远的地址工作,对这种仪器的作用距离是有必然要求的,也确实是 关于它们的灵敏度有必然要求。对测温仪一类的探测系统那么要求必然的温度灵敏度。探测老是在噪声干扰下进行的,噪声干扰包括系统外部的来自背景的干
3、扰和系统内部探测器本身的噪 声干扰,为了能从噪声干扰中更多地提取有效信息,为了把噪声干扰造成的系统误动作的可能性降到最小, 因此探测系统的虚警概率要低,发觉概率耍高。对报警器来讲.这方面的指标要求应更高些。测量精度要高关于辐射计、测温仪一类的探测系统,要求对辐射量或温度的测量有必然的准确度,即有必然的精度 要求,通经常使用相对误差来表示。关于方位仪来讲,那么要求必然的位置测量精度。依照方位仪利用的场合不同,对精度的要求也不同, 若是用于测角系统,测角精度一样为秒级。要知足上述一些大体的技术指标要求,需要通过合理的设计方案的选择、优良的元器件的选用和严格 的加工制作、装调工艺进程来保证。4、设计
4、要求依照整体提出的任务要求,分析与把握目标、背景和各类干扰的红外辐射特性和大气传输特性, 选定系统的工作波段。分析比较各类光机信息处置的体制,如调制盘式、多元脉位式等,选择最适合完成整体任务的 体制,这是红外探测系统设计的核心任务,是确信探测器要求、光学系统结构的前提条件。选择探测器和确信它的技术条件,提出预处置电路的技术要求。确信光学系统的要紧技术参数,包括光学系统的大体形式、接收面积、视场、像质要求、光学 效率等。计算探测距离,给出探测距离相对目标的空间散布,给出典型背景的辐射特性。制定探测系统技术条件,包括灵敏阔、捕捉场等。二、调制盘式探测系统调制盘式探测系统技术成熟,结构相对简单,适用
5、于背景单纯,目标对照度大的情形,如探测天空背 景中的飞机或导弹等,不适用于对地面桥梁、车站、码头等大型冷目标的探测。下图是一种典型的调制盘式探测系统光学布局图,它是一个典型的折反式(卡塞格伦)光学系统,调制 盘置于焦平面上。图3-9折废式(卡笔格佗)光学系统原理图1、大体概念 调制盘调制盘是在能透过红外辐射的基板上,覆盖上一层涂层,然后用光刻的方式把涂层做成许多透辐射和 不透辐射的栅格,这些栅格组成了调制盘的花纹图案。调制盘置于光学系统的焦平面上,当目标像点与调制盘之间有相对运动(通常也叫扫描)时,透辐射 和不透辐射的栅格切割像点,由于这种切割作用,使得恒定辐射能在通过调制盘后,转换成随时刻转
6、变的 断续形式。如此,调制盘就对目标像点的红外辐射能量进行了调制。调制盘的作用:把恒定的辐射通量转变成为交变的辐射通量为了幸免利用直流放大器,应使落到探测器上的红外辐射随时刻转变,探测器产生随时刻转变的交流 信号。在光学系统焦平面周围加一调制盘,使红外辐射断断继续地落到探测器上,如此,探测器就产生随时 刻转变的交流信号。这种将恒定的红外辐射变成随时刻转变的交变辐射的调制盘也称为斩波器。产生目标所在空间位量的信号编码目标在物空间位置的转变与目标像点在像空间,即在调制盘上位置的转变相对应。像点位置的转变,使调制盘输出的载波信号的某些参量,如幅度、频率或相位也随之转变。现在,由 调制盘输出的辐射信号
7、就包括了目标的方位信息。由红外探测器把调制后的辐射通量转换成电信号,用信号处置电路检出载波的相应转变量,就取得了 目标在空间的方位。调制盘可看做是目标位置的信号编码器。进行空间滤波以抑制背景干扰利用目标和背景相关于系统张角大小的不同,调制盘能够抑制背景,突出目标,从而把目标从背景中 分辨出来。调制盘这种滤去背景干扰的作用叫空间滤波。提高红外系统的检测性能红外系统对目标的探测老是在噪声干扰下进行的,为能从噪声干扰中更多地提取有效的信息,红外系 统必需依照适合的检测准那么,确信系统的最正确检测方式及相应的具体系统结构。必然的检测方式,要求与之相应的确信的信号形式,在设有调制盘的系统中,调制盘的型式
8、决定了系 统的信号形式。因此,通过调制盘图案的设计及扫描方式的选择,能够给出知足最正确检测方式所要求的 信号形式,从而提高了系统的检测性能。目标与像点的位置关系目标经光学系统成像,见图,物平面上的一点T对应着象平面上一个确信点T。物平面光学系统像平血图5 74目标像点在调制盘上的位置与目株空间方位之间的关系目标T和像点T在物平面和象平面上的位置,用极坐标表示,别离为(PT,T)和(P,)。望远光 学系统的象平面位于焦平面上,那么P = f tgMe=eTJ4-1/为光学系统的像方焦距;P为xoy平面内像点T至0点距离,称为像点偏离量;e为像点方位角;M为失调角,它是视线 T 与光轴”0的夹角,
9、它的大小反映了目标偏离光轴的大小。像点的位置(P,e)反映了目标偏离光轴的大小和方位。调制盘的分类依照扫描方式可分为旋转式、圆锥扫描式和圆周平移式三类。旋转式调制盘调制盘本身以必然的角速度旋转运动。当目标位置一按时,像点在调制盘上的位置就固定不动。目标 位置转变,像点在调制盘上的位置亦发生相应的转变,调制盘输出包括了目标方位信息并进行了空间滤波。圆锥扫描调制盘调制盘不动,光学系统的扫描机构运动,使适当目标在空间某位置时,光点(即日标像点)在调制盘 上以一定的频率做圆周运动,其轨迹为一中心在不同位置的圆,即扫描圆。圆周平移调制盘调制盘不旋转,调制盘中心绕光学系统中心做同圆周平移。调制盘平移一周,
10、光点在调制盘上扫出一 个圆,该圆偏离调制盘中心的大小和方向,与目标偏离光轴的大小和方向相对应。调制盘依照调制方式来分,上述每一类又可分为调幅式、调频式、调相式和脉冲编码式四种。2、结构组成采纳调制盘作为位置编码器的方位探测系统,其结构组成原理如图所示:这种方位深测系统各部份的结构型式,都与调制盘的类型有关。3、调幅式调制盘系统日出式调制盘日出式调制盘是调幅调制盘中较简单的一种,其图案形式如下图。上半圆为目标调制区,下半圆为半 透区。调制盘置于光学系统的焦平面上,调制盘中心。位于光轴上,调制盘绕中心。转动。假定像点位于图(a)中的M点不动,假设像点的大小比扇形条尺寸小得多,就形成了如图(员所示
11、的脉冲信号波形。(1)调制信号与像点偏离量的关系若是不能忽略像点的大小,像点由调制盘中心向外移动时,如下图,在位置A、B、C时,取得不同脉 冲信号。图3,唔 调制出勺位骨的关系像点由中心向外作径向移动时,显现幅度调制。依照调制盘输出辐射功率脉冲的大小,就能够够确信 像点的径向位置。调制深度D如图所示,像点M的偏离量为P,方位角为0。像点上辐射照度均匀散布,像点总面积为s,像 点上一部份辐射功率F透过调制盘,其面积为S1 ;像点上一部份辐射功率F不能透过调制盘,其面积为S2。孔与S成正比,而f2与S2成正比。S 3.13调制舰输出均制度曲关系当调制盘旋转时,透过调制盘的辐射功率就在F1与气之间周
12、期性地转变。现在调制盘输出的有效的 调制信号应为F1 - f2L它与Is 1 - S21成正比。为了表示像点辐射功率被调制的程度,特引入调制深度D的概念,表征目标辐射通量中被调制部份所 占的比例,表示为F - F2-F式中,F为像点总功率,它与像点的总面积成正比。说明:假定目标像点的面积S不变,那么随着像点偏离量P增大,调制深度D将慢慢增大,现在,调制信 号的幅值也慢慢增大。反之,当p减少时,D值也将减少,调制信号的幅值也减少。即D = /(P)。 能够用有效调制信号的幅值来表示像点偏移量的大小。假设像点的面积为变值,那么调制深度D将随着P及S两个参数转变,即D = f ( p , S )像点
13、面积事实上在整个视场范围内是转变的,若是能操纵像点的面积S使其随偏离量按必然规律转 变,如S = g(P ),那么D = f p, g ( p)(2) 调制信号与像点在调制盘上的方位角之间的关系。日出式调制盘,图案有明显的分界限,令这一分界限Ox为起始坐标线,见图所示。图E-21包络初相泣与汀易、方位金的/瘵当日标像点偏离Ox不同方位角时,所得调制波包络的初相角不同,因此能够用包络的初相角来反映 目标的方位。基准信号的产生有多种方式。(3)空间滤波由于红外系统要保证必然的视场,就不可幸免地引入背景辐射干扰,如地物、云层的辐射和太阳反射 散射等。系统中设置的调制盘能够大大地抑制这些背景干扰,提高
14、系统的信噪比。假设有面积比目标大得多的背景进入视场,那么它在调制盘上所成的像会覆盖多个扇形(如图)。背景可不能造成有效信号输出。这确实是调制盘的空间滤波作用一一抑制大面积背景。 5-78大面积像及其调制波雅展)调制盘勺大面积像3)像点B的调制波形假设有面积不甚大的背景出此刻上述调制盘边缘区域,如图,图5 79祺盘格式调幅调制盘“响尾蛇” AIM-9B导弹所用那么仍可产生调制信号,对目标信号形成干扰。为进一步抑制背景,改良为“棋盘格”式调制盘。为提高抗干扰能力,从中心到边缘,“棋盘格”的径向宽度慢慢减小,但各“格”的面积相同。(4)调制特性分析红外系统在捕捉目标、跟踪目标的进程中,目标像点通常具
15、有必然的偏离量,目标的偏离量常常以失调角m表示。失调角Aq与有效调制信号u之间的关系曲线称为调制曲线。留2T5 调制曲登H棋盘格式调幅周制盘)OE区域:目标处于光轴上或处于光轴周围Aq很小的区域时,像点透过的面积和不透过的面积几乎相等,调制 深度很小,有效信号很小,小于噪声,现在系统输出电压大小取决于噪声值,因此调制曲线显现转变比较 平缓的一个区域。EF区域:Aq继续增加,调制深度也随之迅速增加,有效信号值也增加,调制曲线显现线性上升区。FG区域:Aq继续增加,进入棋盘格区。由于该区每一环带宽度随M增加慢慢变窄,那么调制深度随M增 加显著下降,即有效信号值下降,调制曲线显现下降区。像点在跨越径
16、向环带的分界处时,有效信号值将显著下降,因此实际在调制曲线的下降段还会有许多 很窄的凹陷区。决定调制曲线形状的因素1)调制盘本身图案形式的阻碍一样的像点,一样的偏离量,调制图案不同时,像点透辐射面积和不透辐射面积也不相同,因此调制 深度不相同。调制曲线形状,即盲区大小、线性上升区的宽度和斜率、和下降区的宽度和斜率等都会发生 转变。2)像点大小及其转变规律的阻碍任何一个光学系统,在整个视场内像点的大小和形状都是转变的,它按必然的象差规律转变。因此, 当调制盘图案不变,而像点大小随视场角的转变规律不同时,调制曲线形状也不相同。3)距离的阻碍关于给定目标,当目标与系统之间的距离转变时,使得像点大小和
17、像点能量同时发生转变。在距离较 远时,能量转变因素的阻碍较强,像点面积阻碍较弱,因此随着距离减小,有效信号值的增加是要紧的, 那么调制曲线的斜率增大。当距离很近时,像点面积变大而起的作用占主导地位,使调制深度降低,有效 信号减小,调制曲线斜率降低。光点扫描式调制盘也称圆锥扫描式调制盘。工作时,光点扫描式调制盘本身不动,由光学系统的专用机构(偏轴次镜或 光楔)旋转做圆锥扫描,使目标像点在调制盘上做圆周运动,取得一光点扫描圆,被调制盘所斩割,输出 调制信号,如下图。下图为光点扫描式调幅调制盘的一种图案。里面的图案是依照空间滤波的考虑设计的,故各环带上的 黑白面积应尽可能相等;外圈三角形的数量依照所
18、选择的载波频率和光点扫描频率来确信。图S跚光口扫描大调幅调捌盘“尾刺”地空导弹所用(1)误差信号的产生如上图,当目标位于A、B、C时,通过滤波后取得如下图的波形:图2 2S 尤点扫描用幅漏制泳系流输上!电fB号波雅目标在光轴时,输出为等幅波,现在包络信号为零,没有交流部份,即无有效信号输出。目标偏离光轴时,由调制盘出射的光脉冲包络信号不为零,即产生了误差信号。误差信号来源a. 像点调制深度的阻碍假定像点大小不变,像点上能量均匀散布。如图,当像点从三角形中部移向根部时,调制深度增加, 那么载波信号电压幅值增加;移向尖部时,调制深度减小,载波信号电压幅值减小。卯)/- (!)座略咂倾时S淆;图2
19、% 象依铅压同片笛扫描前校波彼监b. 载波波形的阻碍假定各点的调制深度D都相同,A、B、C各点对应的像斑能量密度不同一一由A至C慢慢减小,如图 所示。阵K知 调祜筛度口= |的载谩波形由此可见,各点的波形不同。由于波形不同,其载波基波分量的幅值也不相同,经滤波后,载波的幅 值就不相同。显然,像点从三角形中部移向根部时,波形从梯形波变成三角波,载波电压幅值增加;像点 移向三角形尖部时,从梯形波变成距离更小的梯形波,载波电压幅值下降。c. 载波频率转变的阻碍所谓载波频率,即载波每秒钟转变的次数。图 M 口撞此位于不同位蚩时魏应变化状尊泌心光点扫描的角速度是必然的,而扫描圆的大小又不变,因为扫描圆的
20、线速度也是必然的。因此,当光 点移向三角形根部时,载波频率升高,光点移向三角形尖部时,载波频率降低。(2 )调制信号与目标像点位置之间的关系偏离量P与调制信号目标偏离光轴一失调角Aq以后,扫描圆中心相应地偏离调制盘中心,光点也就偏离了三角形中部。 当扫描圆在三角形区域内移动时,包络的幅值随偏离量增大而增大,因此三角形区对应于调制曲线的上升 段。当目标的偏离量Aq再继续增大,如此光点转动一周时刻内,有时有光脉冲输出(上半圆),有时无 光脉冲输出(下半圆),这种情形称为单边调制。单边调制情形下,随着偏离量增大,调制光脉冲数量减 少。单边调制时的包络幅值较三角形区调制的包络幅值有所下降,随着偏离量M
21、的继续增大,包络幅值 下降得更严峻,因此三角形之内的区域对应了调制曲线的下降段。方位角与调制信号当目标偏离的方位角为任意角时,那么扫描圆中心偏离调制盘中心的方位角亦为角,这时载波的包络信号也具有初相角0。将包络信号检出,与基准信号相较较,所得的相位差即为目标在空间的方位角 0(3)调制曲线及其阻碍因素光点扫描式调制盘的调制曲线形状通常如下图,它只包括上升段及下降段,r为上升区宽度,(a-r) 为下降区宽度,上升区宽度比较窄,下降段斜率较大。决定上升区宽度的因素是外圈三角形的高度和光学系统的焦距,设三角形高为H,光学系统焦距为 /,那么上升区宽度,为图m妲弱划艾谨洗拦日指式i用制架阻碍上升段斜率
22、的因素是三角形的形状,短粗三角形对应的调制曲线上升段的斜率大;细长的三角形, 尽管能够取得较宽的上升区,但上升段的斜率却不大。下降段对应了三角形之内的区域,光点扫到此区域时.载波波形及载波频率都相对三角形区转变较大, 因此包络幅值下降专门快。优势:(3)特色一是调制曲线无盲区,斜率大,线性区窄,使系统的灵敏度高,因此多用于跟踪精度要求较高的系统;二是实际工作的有效现场大,比由调制盘图案决定的视场扩大了近一倍。如下图。也确实是说, 要求有效视场相同的情形下,采纳此种调制盘时,调制盘尺寸能够比采纳日出式调制盘小得 多。 2-J4光点扫描调制盘有薮视动缺点: 4 1J空间滤波特性比日出式调制盘要差,
23、因为在圈三角形区,透明和不透明栅格面积相差专门大, 在三角形内部有些地址透明和个透明分格连在一路,造成份格不均匀,这就便大面积像点在一 个旋转周期内的透射比不均匀,因此空间滤波性能大降。当目标偏离时,载波频率转变较大,信号频谱变宽,给电子线路设计带来了麻烦。4、调频式调制盘系统旋转调频式调制盘对基频信号进行频率调制一样能够取得目标的方位及误差信号,并起到空间滤波的作用。(1)图案及调制波形如图所示为一种旋转调频调制盘。整个调制盘划分为三层环带,各层环带中黑白相间的扇形分格从内向外为八、1六、32。每层环带扇形角度分格大小也是不均匀的,系沿圆周基线OO起按正弦规律转变。旋转调频调制盘及其波形L一
24、信号mik; N一基座电压英国初期“天空闪光”空空导弹所用目标像点与盘心距离增大时,经调制后输出辐射脉冲的平均宽度就变窄。如目标像点位于图(a)中外 层P处,方位角为0,那么经调制后辐射脉冲波形如图(b)所示。(2) 方位提取图中矩形脉冲频率在调制盘的一个旋转周期内呈正弦规律转变,用公式表示为F (t) = F cosW + M sin(Qt+0 )式中,F0为目标像点辐射功率;为像点所处环带内黑白扇形分格完全均匀的,所对应的载波角频率; Q为调制盘的旋转角频率;M为与像点所处环带扇形角度分格大小的转变范围相应的调制系数, M = A/0 (即像点所处环带内最大偏频与调制盘频率之比);00为目
25、标像点的方位角。由于各环带内黑白扇形分格数量不等,因此不相同;同时不同环带内的最大频偏A不同,因此 不同环带内的调制系数M也不相同,即与M都是像点偏离量P的函数。对任一环带,上式又可写成以下一样表达式F(t) = F cos(p )t + M(u )sin(Qt+0 )式中(p)、M(p )别离为与偏离量p相对应的角频率、调制系数。这种调制辐射功率经探测器转换成脉冲电压,再经放大,鉴频后可变换成正弦电压。此正弦电压与基 准电压信号的相位差,即为目标方位角。正弦电压信号的幅值由(p)、M(P)决定,如此,就可用 (P)和M (p)配合起来反映目标偏离量的大小,并可用初相角0 0表示目标的方位。上
26、图所示的调制盘只有三个环带,如欲使信号能较精准地反映目标偏离的情形或使信号能知足特定的 调制曲线的要求,那么环带数能够增加。环带中的角度分格也可按不同的要求来安排。(3) 特点(与调幅式比较)调制效率高,在考虑最正确信噪比情形下,这种调制盘的调制效率最高可达,这较之调幅式系统高得多; ,胃,ya 入石 ,抗干扰能力强,这是由于调频信号的处置线路能较好地抑制噪声;工由于各环带角度分格不均匀,使得这种调制盘的空间滤波能力不够理想。和其它调频调制盘一样,这种调制盘系统的电子处置线路较复杂。(4) 其他类型图示是另一种旋转调频调制盘。整个调制盘沿着半径方向分成四个环带,每一环带又分成假设干个黑 白扇形
27、格子,同一环带内的黑白格子所对应的扇形角度相等,每一环带内的扇形黑白格子的数量随径向距 离而转变。由内向外每增加一个环带,扇形黑白格子数量增加一倍。叫.E |顷.血目标位置必然,那么像点处于调制盘上某固定位置。调制盘旋转,当像点在A时,产生的脉冲数量为 像点处于B点时的脉冲数量的一半,因此像点由某环带移到相邻的外边一个环带时,调制频率便升高一倍。 因此,可依照调制频率的转变决定目标的径向位置。但这种调制盘却不能反映目标的方位角,缘故是同一 环带内扇形分格间距相等,处于同一环带内不同方位角的像点,调制频率都相同。圆锥扫描调频调制盘前述的两种旋转式调频调制盘,当目标处于同一环带内不同径向位置时,输
28、出信号的幅值相同,因此 它们不能反映目标偏离量的持续转变情形。图所示的扇形辐条式调制盘,那么能够持续地反映目标的偏离量。图5的3圆锥扫描调频调制盘调制盘置于光学系统焦平面上,且不运动,光学系统通过次镜偏轴旋转作圆锥扫描,在调制盘上取得 一个光点扫描圆。当目标位于光轴上时,光点扫描圆的圆心与调制盘中心重合,信号波形如图b所示,载波频率为一常 值,如图C所示,无误差信号输出。当目标偏离光轴时,扫描圆中心偏离调制盘中心,现在,光点扫描一周扫过扇形辐条的不同部位,扫 描轨迹靠近调制盘中心那部份,载波信号频率升高,扫描轨迹远离调制盘中心部份,载波信号频率降低, 光点扫描一个周期内,载波频率不等,便产生了
29、调频信号,如图d所示,其瞬时频率的转变情形如图e所 示。调频信号通过鉴频后与基准信号相较较,即能够确信目标的偏离量和方位角。图3-13-9L调裁调幅调制新原建用和目标在个位置的探测器输出信另波影AIM-9L导弹所用圆周平移扫描调频调制盘前述的圆锥扫描调频调制盘,其优势是调制特性曲线无盲区,如用于测角或跟踪系统时,其测角精度 和跟踪精度较高。要紧缺点是,采纳次镜偏轴旋转的方式来产生光点扫描圆,光学系统始终工作在偏轴状态下,因此光学系统的成象质量较差。假设采纳调制盘绕光轴作圆周平移的扫描方式,那么能够在光学系总共轴(无倾斜和旋转部件)情形 下,产生与上述圆锥扫描相同的扫描成效(即在调制盘平面上产生
30、光点扫描圆,且光点扫描圆中心位置随 目标像点在视场内偏离大小和方位而转变)。圆周平移扫描与次镜偏袖旋转的圆锥扫描调频调制盘,只是扫描方式不同,误差信号产生的原理及解 调方式均相同。围A94圆周平移调制盘的工作原原i阔1H血i制度垃迹:i-M点轨菠i 5-H.点轨证(1)工作原理调制盘中心始于A点,系统的视场范围对应在调制盘下部;当调制盘按图示方向章动,使其中心前后 在B、C、D点时,那么系统的视场范围噩依次处于调制盘右部、上部和左部;调制盘章动一周时,其中心 回到A点,系统的视场范围也回至调制盘下部。假定调制盘不动,那么视场范围相对调制盘的位置如图(c)所示。从相对位置而言,(c)、( b)是
31、等效 的。由于章动的特性,当视场所决定的圆(图中划阴影线的部份)绕调制盘中心A章动一周时,视场内任一 点的轨迹都是半径为AM的圆。当目标在光轴上时,其像点M (见图(b) (c)在视场中心,章动使M沿M-M -M -M -M轨迹扫出如123(c)所示的虚线圆。调制盘输出的等幅、等宽、等距离短形脉冲序列,如图(a)所示。a 5-95各点的载波波形对应的载波频率为一恒量。这与前面圆锥扫描之视场中心的像“点”所表现出来的情形完全一样。假设目标偏离光轴到极限位置,且其像“点”位于视场范围最下方的M(见图(d)。章动一周时,M 沿图中m,lm,厂m,lm,方向扫出半径也为的圆,但圆心在入点的正下方,成为
32、一个偏心圆(如虚线所 示)。这种偏心致使章动一周进程中,载波频率不断转变,如图(b)所示。假设目标像“点”在图(d)中M点,连线AM”与AM,有夹角中,那么在调制盘章动一周的进程中,M 点将扫出圆心在连线AM”上、半径亦与线段AM相等的圆,如图/)中双点划线所示。由于M”所处方位与 M,不同,故与之相应的载波波形与M,的也不一样,如图(c)所示。调频波通过鉴频并与基准信号比较,就可取得目标失调角和方位角。(2)特色有效说明,章动调制盘除无“盲区”、可用于高精度跟踪等优势之外,与圆锥扫描相较,它还有以下 特色:次镜不偏轴,整个光学系统为共轴系统,且无运动部件,因此成像质量好。所采纳的探测器小得多
33、,缘故是,假设不用处镜进行二次聚焦,圆锥扫描的探测器要做成与调 制盘一样大小,而圆周平移扫描的探测器那么只要做成与象平面上的视场面积一样大小,通常 视场比调制盘小,探测器面积减小,噪声降低,提高了系统探测灵敏度,增加了作用距离。圆周平移扫描与圆锥扫描相较的缺点是,圆周平移扫描运动的实现方式较复杂些。调幅与调频调制盘的比较调频调制盘对目标能量的利用率高,抗干扰能力强,因此探测距离较远。但信号带宽较宽,信 号处置系统较复杂(必需采纳鉴频器)。调幅调制盘最大的缺点是目标能量利用率低,抗干扰能力铰弱,但它的信号处置电路却比较简 单(采纳包络检波的解调方式),因此系统工作稳固、靠得住。五、调相式调制盘图
34、示的是一种简单的调相式调制盘。目标像点聚焦在旋转着的调制盘上,用透过辐射脉冲串的相位信 息,去标识目标的径向位置。$ (b)K 5 105调相式国制盘图5-106调制盘的出电信号波形当像点位于小于R的一根辐条上,那么取得图a所示的波形。假设像点位于同一根细条大于R的位 置上,那么波形与a类似,但相位与a相差l800如图c所示。假设像点正益处于分界限上,取得图b所 示的波形,这是由于凋制盘转动的一个周期中,像点能量始终只有一半被调制扇形区调制,因此其幅度为 a、c波形的一半。很显然,这种调制盘只能给出目标沿径向处于“界外”、“压线”、“界内”的信息,而无 法表示偏离量的具体大小,也不能反映目标偏
35、离的方位角。调相体制很少单独利用,因为它不能全面反映目标的位置。六、脉冲调宽式调制盘图示是一种脉冲调宽式调制盘,白色为全透射区,黑色为不透射区。调制盘绕中心。旋转,目标像点 不动。当目标像点位干中心。周围时,那么透射辐射所产生的波形如图a所示;而当目标像点靠近调制盘 边缘时,形成如图b所示的波形。由图可见,当目标像点沿径向偏离中心时,透射辐射脉冲的周期T不变, 而脉冲宽度 慢慢变大,那么脉冲占空比增大。在脉冲占空比的转变中,包括了目标沿径向偏离光袖的位 置信息。图5-103脉冲宽度调制裁图S-L04脉冲宽度调制波彩关于图示的调制盘形式,脉冲宽度的转变只能反映目标像点径向偏离量的大小,而不能反映
36、目标的方 位。因此,脉冲调宽体制往往与其他调制形式综合起来反映目标的位置。三、十字叉及L型系统所谓十字叉及L型系统,是指探测器排列成十字叉型或L型的方位探测系统。它们不采纳调制盘,因 此其工作原理与调制盘系统截然不同。而这两种系统工作原理大体相同。1、机构组成情形十字叉系统由光学系统、探测器及信号处置电路三部份组成。光线系统可采纳反射式、透射式或折反式,其工作方式为圆锥扫描式,在像平面上产生光电扫描圆。像平面上放置由四元探测器组成的十字型阵 列,目标像点以圆的轨迹扫过十字型探测器阵列。贸3-16 “十字雅豚位制等全学系统和探测器的布局图图3-|7 “十,字形脉位探测系统的视场形状图图5-110
37、 +字型探测器连级圈图5-111责点扫描光学系统1 一基准慌号产生器;Z驱祜电机;3一次鼬4一探狷翌;v- -kW2、目标位置信号的形式上下两探测器a和b为方位通道误差信号灵敏元件,左右方向的C和d为俯仰通道误差信号灵敏元 件。像点在十字叉型探测器阵列上作圆形扫描,像点扫过每一个探测器的刹时,就使光导探测器的电阻值 发生转变,造成同一通道的两个元件a-b或c-d的电阻值形成刹时的不平稳,如此在每一通道元件的 输出端引发相关于地的电位刹时转变而产生正、负极性的脉冲信号。3、基准信号形式次反射镜转动电机驱动次镜旋转的同时,带动基准信号发生器转动,基准信号发生器为两个旋转变压 器,别离产生相位差90
38、o的两个基准电压,电压依照余弦形式转变,基准信号的频率与光电扫描频率严格 同步。4、方位信息的提取十字叉探测器信号处置电路原理如下图:处置电路各点波形示用意为:图5-IU目廊位于二字受系境不伺位置时方位(AZ)通道探测器及虹理电路各点波增图一操制器输出波形,噌一前置顺大器警出波带;一对数放大器输出波曜j -JF美电罚歧出祯形;购一方位基麻信导澳股;-采祥输出旗雅i一缰冲器搐出波形五、特色十字叉系统与调制盘相较,突出的优势是:一爪无调制盘,无二次聚焦系统,因此目标能量利用率高;人Z 误差特点曲线在整个视场范围内都是线性的,线性度高;该系统理论上没有盲区,测角精度高。要紧的缺点是:没有调制盘所具有
39、的空间滤波性能;系统电子带宽较宽,探测器噪声大;假设做成多元十字叉探测器较困难。六、抗背景干扰的方法在不减小系统瞬时视场的前提下,能够采纳目标位置实时波门跟踪器,即实时“选通”门电路,滤去 视场内的背景,但它不能滤去极靠近目标周围的背景辐射。从提高系统灵敏度的角度动身,为减小探测器单元面积,可把十字形探测器的每一臂做成多元,以提 高系统的信噪比。现在可将多元探测器每两两相邻的元件做成正负相减元件,这也能够达到抑制大面积背 景干扰的目的。这种方式称为“面积相减技术”。7、阻碍测角精度的因素1)光学系统的阻碍。弥散圆的大小会阻碍信号脉冲的宽度和形状,它直接阻碍对基准信号的采样, 也就阻碍最终输出的
40、误差信号。2)扫描电机稳固性的阻碍。次镜旋转电机转速的稳固性和它本身的晃动,都阻碍测角误差。3)红外探测器制作误差的阻碍。红外探测器阵列每一臂长边彼此不平行或窄边有锯齿,及同一通道 的两个探测器不在同一直线上或两通道的探测器彼此不垂直等,都会阻碍测角精度。4)基准信号的阻碍。基准信号波形失真,两通道基准信号相位差偏离90o的误差也阻碍测角精度。5)电路相移的阻碍。目标信号或基准信号通过电路时所产生的相移,直接阻碍目标脉冲与基准信号 的相对位置,故也阻碍测角精度。通过采取方法,十字叉系统的测角精度能够达到秒级。四、L型系统L型方位探测系统,是指探测器阵列排列成L形,如以下图所示:美国“陶”(TO
41、W)式反坦克导弹所用一、信号形式L型系统的目标信号形式、基准信号形式和方位误差信号提取的原理都与十字叉系统相同。区别仅在 于,光电旋转一周,一个通道内只产生一个脉位调制脉冲,因此对基准信号只采样一次。二、测量精度十字叉系统由于一周采样两次,因此当基准波形不对称时,波形的局部误差、相位差、取样脉冲宽度 等都会造成取样误差,降低测量精度。L型系统每周采样一次,克服了上述几种误差的阻碍,因此L型系统的测量精度更高。3、视场大小当光学系统视场大小相同的情形下,L型和十字型探测器的每臂长是不同的。为保证不丢失目标,L 型探测器一个臂的长度要等于光学视场的直径,而十字型系统的一个臂长只需为视场直径的一半。
42、若是视场大,又采纳多元相减技术,那么必然使L型探测的基片尺寸太大,每臂元数多,使多元的均 匀性难以保证,器件性能下降。为克服上述缺点,又充分发挥L型系统测量精度高的优势,有些红外探测系统做成两种视场,大视场 时要紧要求捕捉能力高,精度要求是次要的,因此采纳十字型探测器;小视场时测量精度要求是要紧的, 因此采纳1型探测器。五、玫瑰线扫描系统图示是一种能够实现多种像“点”扫描运动的系统示意。它由平行光路中的两旋转光楔、物镜、探测 器组成。图伟点扫描系统及探熊器在空间的恒动(1)侮血扫描系雄;(b)援随器在外空制的运的1、一城转魅境i, 3北学源统:域一冗岬探测群一、扫描图案假设以光轴为x轴,x-y
43、平面为子午面,组成xyz右手直角坐标系,并设光楔对光线的偏折角为A (两 光楔材料一样,楔角相同),各自绕乂轴以圆频率、气旋转,那么总的光线偏折角可沿y、z轴分解为A = 4(cos 气 t + cos 气 t)A = A(sin 气 t + sin 气 t)选择光楔的转动方向和转速,可使光轴上的探测单元在物空间按人们所要求的轨迹扫描。例如,令=-321那么有A = A(cos 气 t + cos3i t)A = A(sin 气 t - sin3i t)假设用极坐标表示,那么不难证明p = 2 A cos2显然,这确实是花瓣长度为2A的四叶玫瑰线。二、实现方案图示是采纳反射镜反向旋转实现玫瑰线
44、扫描的方案示意。其中主镜、次镜相关于一样意义上的“光轴” 各自倾斜一个不大的角度,且倾角大小一样,但符号相反;主镜、次镜别离绕系统“光轴”反向旋转。选 择二者转速,可产生如下图的由N个花瓣组成的扫描图案一一多叶玫瑰线。FS? 5-109攻瑰扫描图案及其产!上方法M 玫魔月描图策;(b)玫瑰扫播图案的产生斤法3、特色在这种方案中,视场中心是各叶扫描线的交会处,故每帧有2N次脉冲提供目标的位置信息。当目标 偏离视场中心后,每帧至少有一次脉冲提供其位置信息。这也是玫瑰线扫描系统比采纳调制盘的系统优越 的地方一一对采纳调制盘者,不论目标成像于调制盘上何处,每帧都只有一次提供目标的位置信息。采纳玫瑰线扫
45、描的系统具有很小的瞬时视场(例如,可使它与最远工作距离对应的目标张角相当), 因此可利用很小的探测器。由于探测器噪声与其面积的平方根成正比,故有利于减小噪声。同时,小面积 探测器制作容易,有利于降低本钱和提高成品质量;小型探测器便于制冷,也是使信噪比提高的因素之一。固然,小的瞬时视场对应着窄的脉冲宽度,相应的要求是电子线路带宽扩大,这就增加了电子系统的 噪声。但这种损失远比上述收益为小。计算说明,此类系统的灵敏度明显优于采纳调幅式调制盘的系统。美国“尾刺(Stinger)-POST ”便携式地一空导弹是性能专门好的导弹,它的显著特点之一确实是采纳 了玫瑰线扫描方案。六、扫描探测系统扫描探测系统
46、(检测扫描系统)无需对目标辐射能进行调制,而是系统本身对景物空间进行扫描,扫 描到目标时,系统输出一个脉冲,该脉冲对基准信号采样,如此就测到了目标的方位误差信号。扫描系统与前面介绍的系统相较,它能够在瞬时视场(探测器面积和光学系统决定)很小的情形下, 通过扫描观看到较大的空间范围,提高了系统的灵敏度和抗背景干扰的能力。一、结构简介扫描系统的大体结构组成包括光学系统、探测器、信号处置电路、扫描驱动机构和扫描信号发生器。扫描驱动机构使光学系统在必然空间范围按必然规律进行扫描。扫描运动规律(即扫描图形)由扫描 信号产生器产生的扫描信号来操纵。扫描图形有多种形式,如以下图所示的一线扫描、三线扫描或四线
47、扫描。探测器置于光学系统的焦平面上,它能够是单元探测器,也能够是线阵的或面阵的多元阵列。按多元排列方式扫描方向之间的关系,扫描系统可分为串联扫描、并联扫描和串并联扫描三种方式。2、目标信号的形式假设在扫描空域范围内,空间某一名置有一个目标点存在,那么瞬时视场扫过这一点时,便产生一个 视频脉冲。假设是单元扫描系统,那么那个视频脉冲通过放大后即可用来提取目标位置信息。假设是多元 并扫系统,那么需通过量路信号处置,从而把空间某一名置的目标信号转换成按时序输出的视频脉冲,再 从那个时序视频脉冲中提取目标的位置信息。下面是一个六元并扫系统的工作示用意。在扫描进程中,信号在探测器上的驻留时刻为C,T由扫描
48、速度和探测器在方位方向的瞬时视场决 定。信号门由电子开关操纵,在顺序接通1至6号信号门进程中,事实上确实是在俯仰方向上完成六倍探 测器俯仰瞬时视场的电扫描。电子开关顺序接通一遍的时刻为一个采样周期Tc,T T d。如此在=d时 刻内每一个信号门接通T d / Td次。假设空间某个位置有目标,使第二个探测器接收到红外辐射,那么第二号探测器输出一个宽度为T d的 脉冲。当二号信号门开启时,脉冲输出一次,在T d内共输出脉冲T d / Td个。6个脉冲积存器对前端的输入脉冲进行积存,而后在时序驱动下,顺序输出。由于仅二号积存器有脉 冲输入,故积存器输出时,也仅有二号积存器有脉冲输出。3、基准信号形式
49、基准信号分为方位基准和俯仰基准,它们别离加入方位和俯仰采样维持电路。方位基准信号为三角波,周期为孔,俯仰基准为阶梯波,周期为T。关于单元探测而言,t内的 阶梯数由俯仰观看视场内所包括的俯仰瞬时视场数决定(扫描行数);关于多元探测器,当探测器并联, 扫描图像为一线时,t内的阶梯数等于探测器数量。基准信号的周期、Ty值及基准信号形式,与探测器数量n及扫描图像有关。假设观看视场为 AxB,探测器单元瞬时视场为ax P,那么AXB内包括M X N个瞬时视场,其中M为扫描列数, M = A/a ; N为扫描行数,N = B / p o假设扫描一行所需的时刻为T帧时为气,那么基准 信号的周期Tx = 2匕
50、,Ty = Tf。4、方位信息提取不管单元仍是多元扫描系统,所得的目标信号都是一个视频脉冲,该视频脉冲显现的时刻前后与目标 所在的空间位置有关,因此扫描系统的目标信号实际上确实是脉冲位置编码信号。目标脉冲对两个通道的 基准信号进行采样,采样维持电路输出的幅值确实是误差信号,误差值的大小反映了目标脉冲与基准信号之间的相对位置,即反映了目标的空间位置。产生的目标脉冲别离对基准信号进行采如上图。假定瞬时视场扫到第i列第J行,接收到目标辐射, 样维持,取得该点的方位和俯仰误差电压。关于多元探测系统来讲,原理是一样的,只是基准信号要相应 的换成多元扫描信号。5、扫描系统的测角精度扫描系统的测角精度由单个探测单元的瞬时视场决定。一样瞬时视场为1mrad,测角精度在23.4。
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
