《智能车各模块硬件电路及其原理的详细》由会员分享,可在线阅读,更多相关《智能车各模块硬件电路及其原理的详细(7页珍藏版)》请在装配图网上搜索。
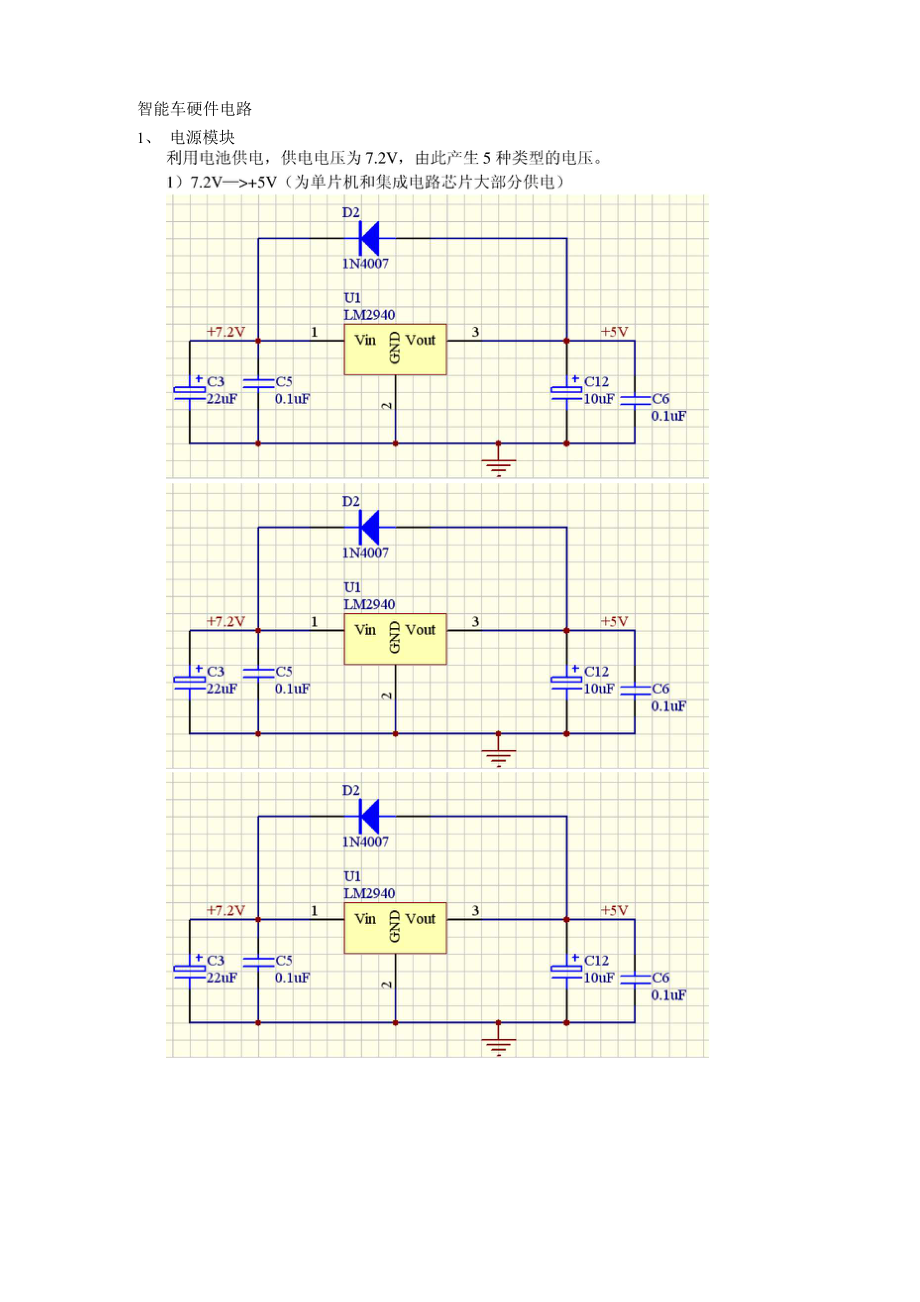
1、智能车硬件电路1、 电源模块4) +7.2V6.4V (为舵机供电)D3N10I?uFuFD5C13 lOuF4007+7.2722uFViti Q Vout01NS007匹LM29405)+5V-5V (为集成运放供电)VU3C1682736C150.0111F1011FNC VccCAP+ NCCAP-VoutGND LV10BF2、 霍尔测速模块J10D63SPEEDMC74F04WK#1J6AHERO;iED2SPEED洱EDHOE工3、 电机驱动模块IiK.-lKJ:I-电机驱动电路3U1FR22il.ff u J J./l. -:4、 路径检测模块1)基于CCD的路径检测视频信号分
2、离部分JK 触发器实现行采样移位锁存+!V211514Ti-i I1,131%12Pl32)15r-1fl JUliu尹7/6TTy十-* *.*/34TJjiiI-SerCSmsbDI?IsbDIuDEDI5DI4DEDI2Dn164环境检测得到基准电压环境检测得到基准电压Dac0832 部分)41(FluTvDataOuFLuwDiitiLhjt111IM比较器输出,二值化部分)2)基于光电的路径检测5、单片机控制模块1) 电机驱动部分PWM6 刹车制动PWM7 方向输出(电机驱动)2) 舵机控制部分PWMO和PWM1级联,输出频率为50Hz的脉宽信号用于舵机的方向控制3)CCD 检测路径
3、部分PWM2 1MHz的行值采样信号PT0 上升沿启动场频中断PB2 高电平启动行采样,下降沿锁存行信息PB1启动移位读入行信息PB0行信息输入位PB3 DAC0832 输出控制信号4) 光电检测输入部分利用ATD0和ATD1共同进行16路A/D转换获得路径信息5) 速度检测部分由 PT1 采用输入捕获方式进行速度检测。6) 无线通信模块 负责传递速度、路径等信息给上位机进行分析,可以进行整车调试等工作7) 环境检测部分利用ATD0的AN0对环境信息进行转换,通过滤波的方式求得环境的信息,并将其转 换成数字量通过PA 口输出至DAC0832,同时利用PB3启动D/A转换,获得二值化处 理的基准电压。
 智能车各模块硬件电路及其原理的详细
智能车各模块硬件电路及其原理的详细