《简述工业机器人的定义》由会员分享,可在线阅读,更多相关《简述工业机器人的定义(8页珍藏版)》请在装配图网上搜索。
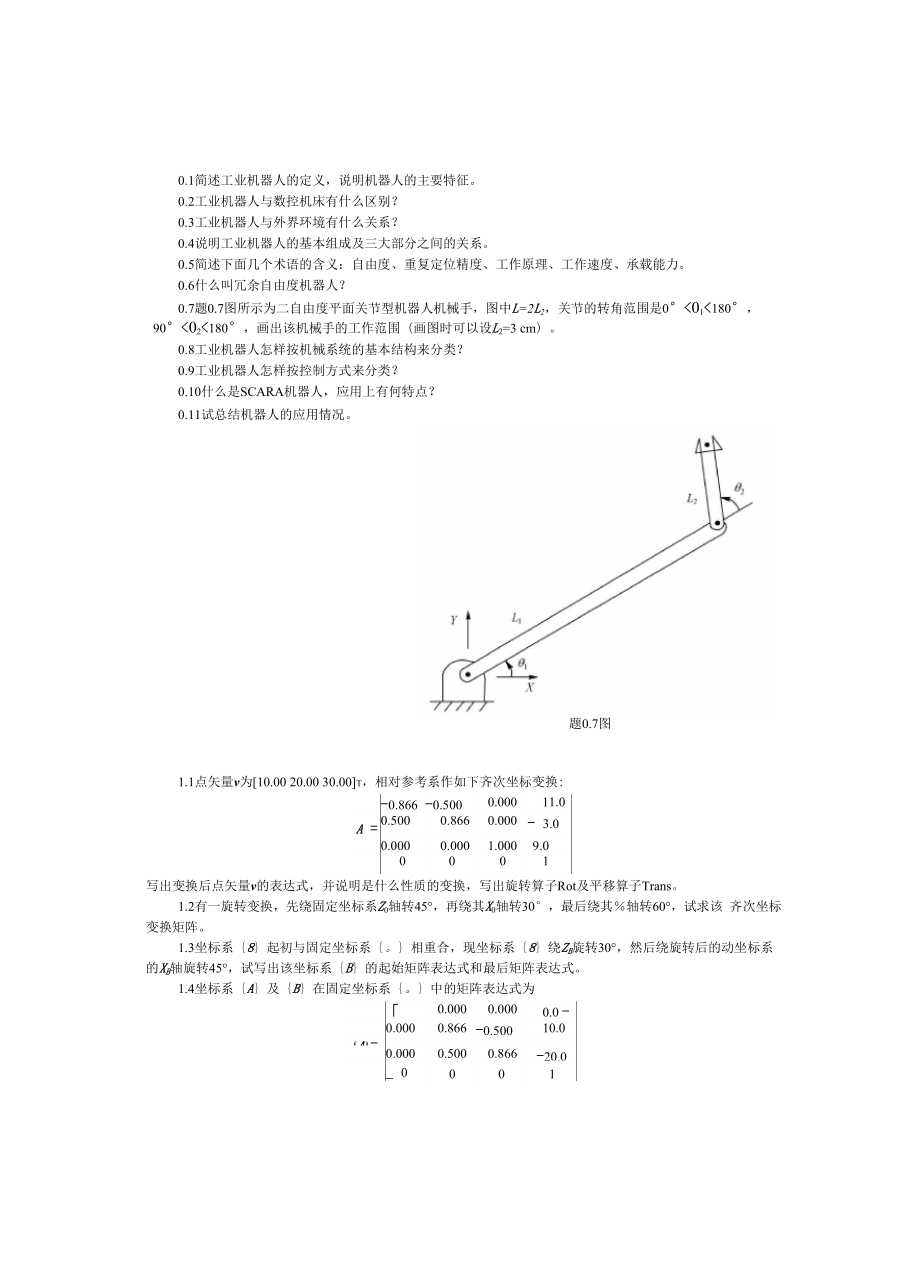
1、0.1简述工业机器人的定义,说明机器人的主要特征。0.2工业机器人与数控机床有什么区别?0.3工业机器人与外界环境有什么关系?0.4说明工业机器人的基本组成及三大部分之间的关系。0.5简述下面几个术语的含义:自由度、重复定位精度、工作原理、工作速度、承载能力。0.6什么叫冗余自由度机器人?0.7题0.7图所示为二自由度平面关节型机器人机械手,图中L=2L2,关节的转角范围是001180,9002 禹、,试建立杆件坐标系,并推导出该机械手的运动学方程。题1.10图1.11题1.11图所示为一个二自由度的机械手,两连杆长度均为1m,试建立各杆件坐标系,求出A】、 A2及该机械手的运动学逆解。题1.
2、11图1.12什么是机器人运动学逆解的多重性?1.13有一台如题1.13图所示的三自由度机械手的机构,各关节转角正向均由箭头所示方向指定, 请标出各连杆的D-H坐标系,然后求各变换矩阵&、人2、A3o题1.13图1.14试按D-H坐标系建立题1.14图所示机器人各杆的坐标系(各Z轴正向位于有旋转标志一端,Z0、 Z6如题1.14图所示)。1.15试求题1.15图所示V80机器人的运动学方程。题1.15图2.1简述欧拉方程的基本原理。2.2简述用拉格朗日方法建立机器人动力学方程的步骤。2.3动力学方程的简化条件有哪些?2.4简述空间分辨率的基本概念。2.5机器人的稳态负荷的研究包括哪些内容?2.
3、6简述计算机控制机器人获得良好的重复性的处理步骤。2.7分别用拉格朗日动力学及牛顿力学推导题2.8图所示单自由度系统力和加速度的关系。假设车轮 的惯量可忽略不计,X轴表示小车的运动方向。2.8推导题2.8图所示两自由度系统的运动方程。2.9推导题2.9图所示的两自由度系统的运动方程。题2.8图题2.9图2.10用拉格朗日法推导题2.10图所示两自由度机器人手臂的运动方程。连杆质心位于连杆中心,其 转动惯量分别为I1和/2。2.11简述机器人速度雅可比、力雅可比的概念及其二者之间的关系。2.12巳知二自由度机械手的雅可比矩阵为J =3% *12J l cO +1 c l c112 122 12若
4、忽略重力,当手部端点力F =1 0T时,求相应的关节力矩T 2.13如题2.13图所示,一个三自由度机械手,其末端夹持一质量m=10 kg的重物,l=l2=0.8 m,=60, %= -60,e3= -90。若不计机械手的质量,求机械手处于平衡状态时的各关节力矩。题2.10图题2.13图 三自由度机械手2.14如题2.14图所示二自由度机械手,杆长11=12=0.5 m,求下面三种情况时的关节瞬时速度1、2。VJ(m/s)-1.001.0VJ(m/s)01.01.00,3030301 -60120-30题2.14图 二自由度机械手2.15如题2.15图所示三自由度平面关节机械手,其手部握有焊接
5、工具,若巳知各个关节的瞬时角度 及瞬时角速度,求焊接工具末端A的线速度VX、Vy。题2.15图 三自由度平面关节机械手(2)3.44.14.24.34.44.54.64.74.84.94.103.1何谓轨迹规划?简述轨迹规划的方法并说明其特点。3.2设一机器人具有6个转动关节,其关节运动均按三次多项式规划,要求经过两个中间路径点后停 在一个目标位置。试问欲描述该机器人关节的运动,共需要多少个独立的三次多项式?要确定这些三次多项 式,需要多少个系数?3.3单连杆机器人的转动关节,从0 = -5。静止开始运动,要想在4 s内使该关节平滑地运动到0 =+80 的位置停止。试按下述要求确定运动轨迹:关
6、节运动依三次多项式插值方式规划。关节运动按抛物线过渡的线性插值方式规划。目前有哪几种模型应用于机器人系统构型?各自有何优、缺点? 机器人本体主要包括哪几部分?以关节型机器人为例说明机器人本体的基本结构和主要特点。如何选择机器人本体的材料,常用的机器人本体材料有哪些?何谓材料的E/p?为提高构件刚度选用材料E/p大些还是小些好,为什么?机身设计应注意哪些问题?何谓升降立柱下降不卡死条件?立柱导套为什么要有一定的长度?机器人臂部设计应注意哪些问题?常用的臂杆平衡方法有哪几种?试述质量平衡常用的平行四边形平衡机构。什么叫BBR手腕、RRR手腕?什么叫手腕自由度退化?机器人手爪有哪些种类,各有什么特点
7、?试述磁力吸盘和真空吸盘的工作原理。4.11何谓自适应吸盘及异形吸盘?4.12机器人对移动关节有何要求?为什么常用滚动导轨?4.13机器人专用滚动轴承有何特点?机器人为什么要采用谐波传动?4.14传动件定位常有哪几种方法?4.15传动件消隙常有哪几种方法,各有什么特点?4.16简述机器人行走机构结构的基本形式和特点。4.17简述两足步行机器人行走机构的工作原理。5.1说明工业机器人常用的控制结构形式,就你所熟知的某种工业机器人分析其控制器的控 制结构。5.2机器人传感器常用的有哪几种?5.3传感器的主要性能参数有哪几个?5.4简述电位式位移传感器的工作原理。5.5分析二进制吗盘与格雷吗盘结构的
8、异同。5.6角速度传感器常用的有哪几种?举例说明其中一种的工作原理。5.7分析外部传感器中力矩传感器的测量原理。5.8简述触觉传感器的测量原理。5.9采用基于芯片的运动控制器来控制机器人的运动有什么特点?5.10 LM628芯片有什么功能?5.11分析运动控制卡控制的结构特点?举例说明你所了解的运动控制卡的应用。5.12步进电机具有哪些优点?说明反应式步进电机的工作原理。5.13 MOTOMAN-UP6型机器人的控制器XRC有哪些控制功能?5.14分析XRC外部控制功能的作用及应用。5.15何为分解运动控制?为什么要进行分解运动控制?5.16分解运动控制的思路及实现方法是什么?5.17分解运动加速度控制的目标是什么?怎么实现?
 简述工业机器人的定义
简述工业机器人的定义