《matlab实验九控制系统的PI校正设计及仿真》由会员分享,可在线阅读,更多相关《matlab实验九控制系统的PI校正设计及仿真(10页珍藏版)》请在装配图网上搜索。
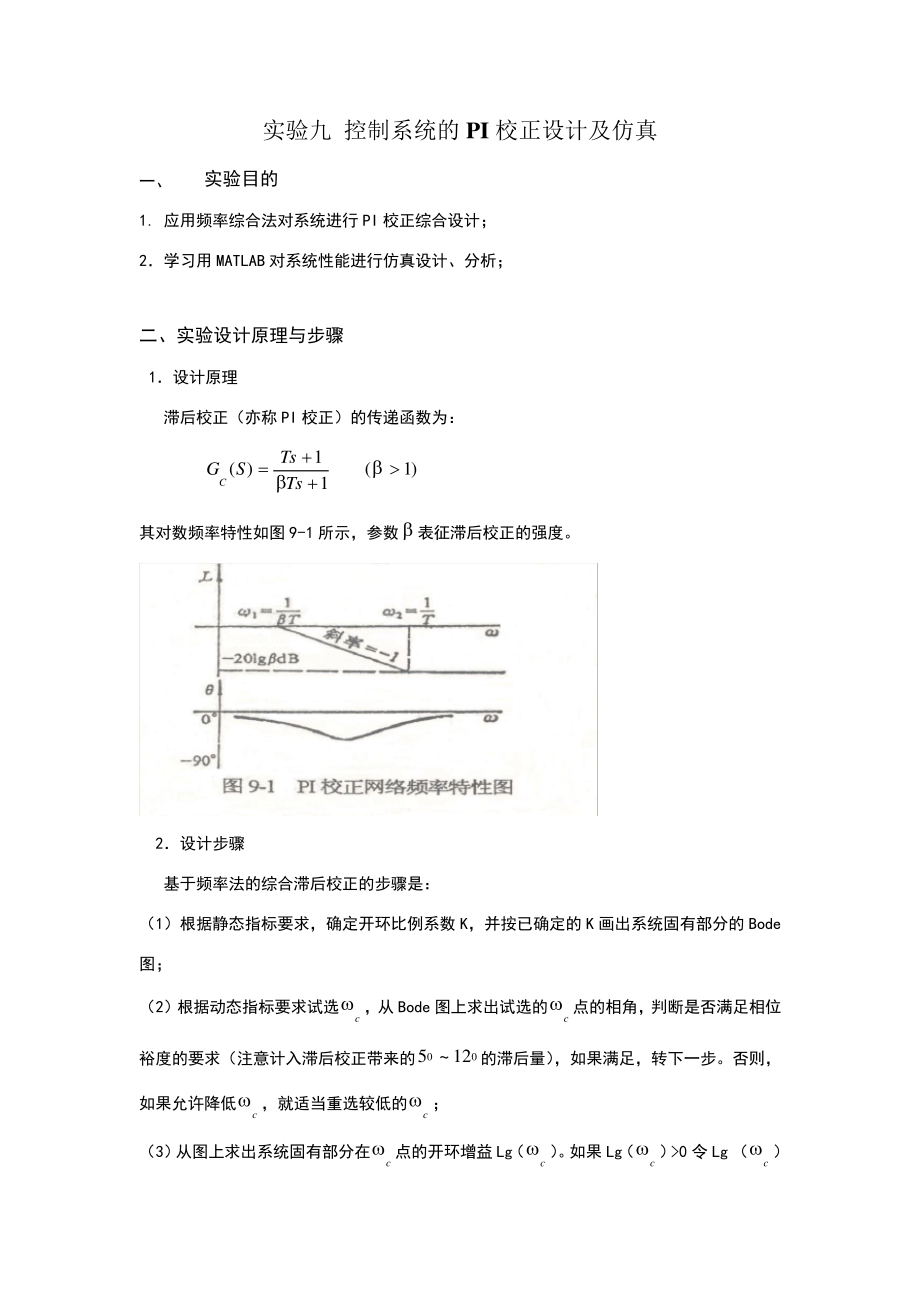
1、实验九 控制系统的 PI 校正设计及仿真 一、实验目的 1.应用频率综合法对系统进行 PI 校正综合设计;2学习用 MATLAB 对系统性能进行仿真设计、分析;二、实验设计原理与步骤 1设计原理 滞后校正(亦称 PI 校正)的传递函数为:)1(11)(TsTsSGC 其对数频率特性如图 9-1 所示,参数表征滞后校正的强度。2设计步骤 基于频率法的综合滞后校正的步骤是:(1)根据静态指标要求,确定开环比例系数 K,并按已确定的 K 画出系统固有部分的 Bode图;(2)根据动态指标要求试选c,从 Bode 图上求出试选的c点的相角,判断是否满足相位裕度的要求(注意计入滞后校正带来的00125的
2、滞后量),如果满足,转下一步。否则,如果允许降低c,就适当重选较低的c;(3)从图上求出系统固有部分在c点的开环增益 Lg(c)。如果 Lg(c)0 令 Lg(c)=20lg,求出,就是滞后校正的强度,如果 Lg(c)0,则无须校正,且可将开环比例系数提高。(4)选择CT)10151(12,进而确定T11。(5)画出校正后系统的 Bode 图,校核相位裕量。滞后校正的主要作用是降低中频段和高频段的开环增益,但同时使低频段的开环增益不受影响,从而达到兼顾静态性能与稳定性。它的副作用是会在c点产生一定的相角滞后。三、实验内容 练习 9-1 设系统原有开环传递函数为:)15.0)(1()(SSSKS
3、Gg 系统的相位裕度040 系统的开环比例系数 K=5 S-1 截止频率为c=05 S-1 要求:(1)用频率法设计满足上述要求的串联滞后校正控制器;(2)画出校正前后的 Bode 图(3)用 Simulink 对校正前后的闭环系统进行仿真,求出其阶跃响应;(4)分析设计效果。k0=5;n1=1;d1=conv(conv(1,0,1,1),1);w=logspace(-1,3,1000);sope=tf(k0*n1,d1);figure(1)margin(sope);grid on wc=;num=1;den=1;na=polyval(num,j*wc);da=polyval(den,j*wc
4、);g=na/da;g1=abs(g);h=20*log10(g1);beta=10(h/20);t=10/wc;bt=beta*t;gc=tf(t,1,bt,1)sys1=sope*gc mag1,phase1,w=bode(sys1,w);gm1,pm1,wcg1,wcp1=margin(mag1,phase1,w);figure(2)margin(sys1);grid on;滞后:20 s+1-s+1 练习 9-2 设被控对象开环传递函数为:)5(10)(SSSGg 系统的相位裕度040 系统斜坡输入稳态误差ess=005;截止频率为c=2 1/S 要求:(1)用频率法设计满足上述要求的
5、串联滞后校正控制器;(2)画出校正前后的 Bode 图;(3)用 Simulink 对校正前后的闭环系统进行仿真,求出其阶跃响应;(4)分析设计效果。滞后:5 s+1-s+1 k0=20;n1=10;d1=conv(1,0,1,5);w=logspace(-1,3,1000);sope=tf(k0*n1,d1);figure(1)margin(sope);grid on wc=2;num=1;den=1;na=polyval(num,j*wc);da=polyval(den,j*wc);g=na/da;g1=abs(g);h=20*log10(g1);beta=10(h/20);t=10/wc
6、;bt=beta*t;gc=tf(t,1,bt,1)sys1=sope*gc mag1,phase1,w=bode(sys1,w);gm1,pm1,wcg1,wcp1=margin(mag1,phase1,w);figure(2)margin(sys1);grid on;练习 9-3 已知单位反馈系统被控对象开环传递函数为:)12.0)(11.0(1)(00sSSKSG 试用 BODE 图设计方法对系统进行滞后串联校正设计,使之满足:(1)在单位斜坡信号 r(t)=t 的作用下,系统的速度误差系数 KV130s;(1)系统校正后剪切频率C13.2s;(3)系统斜校正后相角裕度040 要求:(1
7、)用频率法设计满足上述要求的串联滞后校正控制器;(2)画出校正前后的 Bode 图;(3)用 Simulink 对校正前后的闭环系统进行仿真,求出其阶跃响应;(4)分析设计效果。clear%s=tf(s)%G=30/s+1)+1)k0=30;n1=1;d1=conv(conv(1,0,1),1);w=logspace(-1,3,1000);sope=tf(k0*n1,d1);figure(1)margin(sope);grid on wc=;num=1;den=1;na=polyval(num,j*wc);da=polyval(den,j*wc);g=na/da;g1=abs(g);h=20*log10(g1);beta=10(h/20);t=10/wc;bt=beta*t;gc=tf(t,1,bt,1)sys1=sope*gc mag1,phase1,w=bode(sys1,w);gm1,pm1,wcg1,wcp1=margin(mag1,phase1,w);figure(2)margin(sys1);grid on;
 matlab实验九控制系统的PI校正设计及仿真
matlab实验九控制系统的PI校正设计及仿真