 旋转倒立摆的模糊控制
旋转倒立摆的模糊控制

《旋转倒立摆的模糊控制》由会员分享,可在线阅读,更多相关《旋转倒立摆的模糊控制(16页珍藏版)》请在装配图网上搜索。
1、旋转倒立摆的模糊控制摘要:该文针对一级旋转倒立摆系统进行研究。基于Lagrange方程进行了对旋转倒立摆 的系统建模,并在Matlab环境下使用了模糊控制,实现了倒立摆的良好控制,采用积分消 除了稳态误差。实验证明, 此种模糊控制方法有一定的鲁棒性并且控制效果较好。关键词:一级旋转倒立摆;模糊控制;Matlab一、控制对象一级旋转倒立摆倒立摆系统是自动控制理论中比较典型的控制对象 ,许多抽象的控制理论概念如系统 稳定性、可控性和系统抗干扰能力等 ,都可以通过倒立摆系统直观地表现出来。因此它成 为自动控制理论研究的一个较为普遍的研究对象。倒立摆系统作为一个被控对象,是快速、 多变量、开环不稳定、
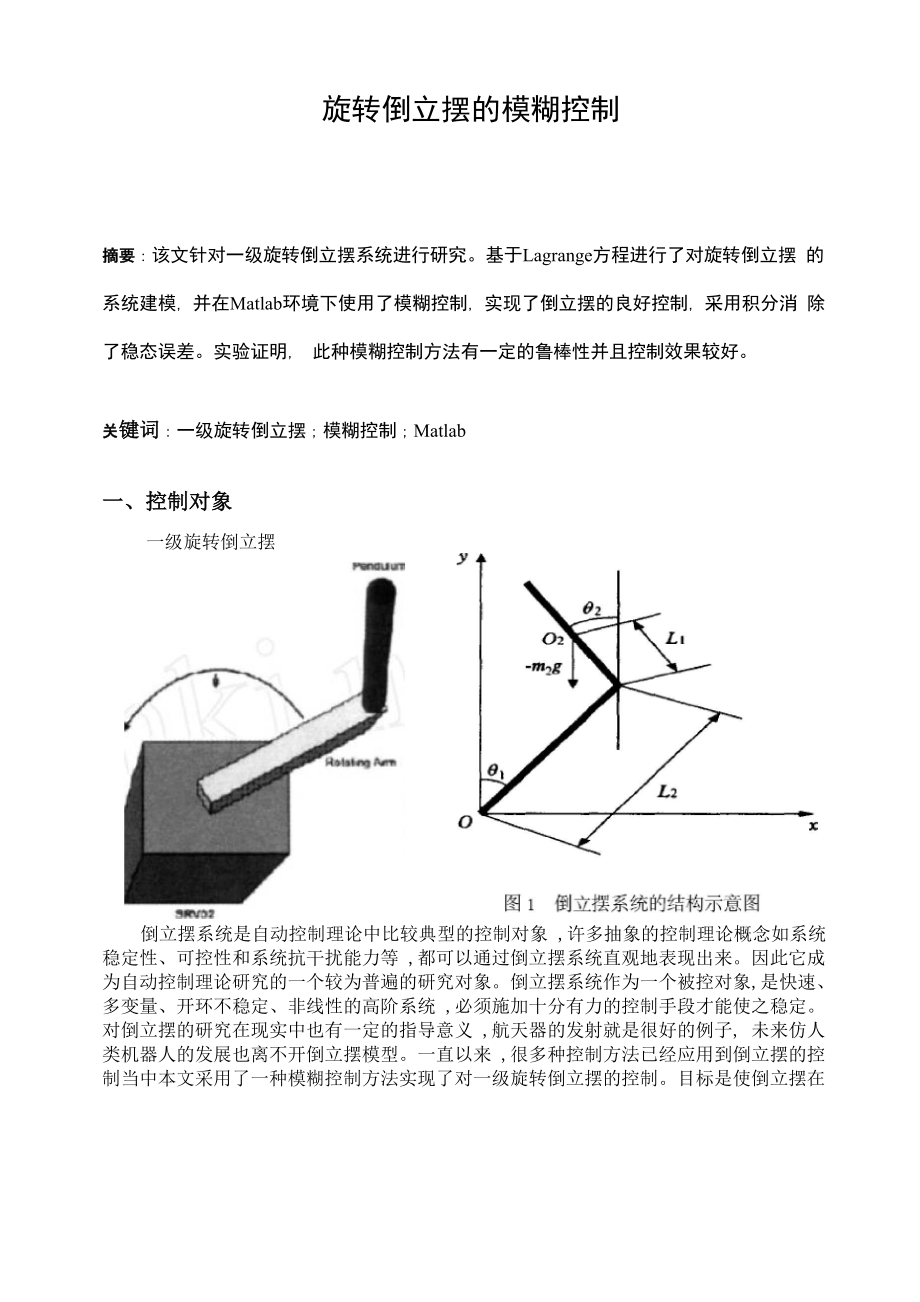
2、非线性的高阶系统 ,必须施加十分有力的控制手段才能使之稳定。 对倒立摆的研究在现实中也有一定的指导意义 ,航天器的发射就是很好的例子, 未来仿人 类机器人的发展也离不开倒立摆模型。一直以来 ,很多种控制方法已经应用到倒立摆的控 制当中本文采用了一种模糊控制方法实现了对一级旋转倒立摆的控制。目标是使倒立摆在 保持平衡的同时,旋臂还能够快速跟踪一个位置给定信号。该次设计所研究的旋转倒立摆系统模型如图 1 所示,倒立摆模块由倒立摆的摆杆和一 个支撑摆杆的旋转臂组成,摆杆固定在旋转臂一端,可以在垂直于转臂的方向上做360度的 转动。旋臂的另一端安装在一个旋转伺服装置上,伺服装置通过电机驱动齿轮转动来实
3、现 旋臂在水平面内做 360 度的旋转。在摆杆的底端以及旋臂的里端均装有光电编码器,用来 检测角度的变化并将信号传送给计算机。涉及到的参数有:01 旋转臂的旋转角11 旋转臂从电机轴到摆支撑点的长度0 .25mJ1为旋转臂的转动惯量0.01kg m 202 倒立摆的旋转角12 倒立摆的旋转轴到重心的长度一一0.1mm 2 倒立摆的质量 0 . 1kg J2倒立摆的转动惯量0.001kgm 2M 电机产生的转矩二、设计方案既涉及设计过程(一)、建模:系统采用拉格朗日动力学分析法1建立运动方程为:(J 十% fit 2 h b 0 訂也十创-h h一切- gZisiii sin = M (1)(I
4、?)+ 酬2 h =2 円1 COS + &2) 4r/H /i h Si sin &i 佻/ - 叫 0gsdn 枇in鸽=0因摆杆摆动幅度小,可认为sin01a01 ,sin02a02 ,cos(02 +01) Q1,由此将(1)式和(2)式作线性化处理,得:(J + m21 ) V-用2“ D 爲- 叱 01 久=M(3)(Ji + 阳2 I孑)佻-用21 D 日1 -叽2 /? = 0(4)由式和式可求出:卜一瑠=X)一和任h f J、一 ”门厂丿%+饷甬(J- ffJ2 l)( Ji 一 M?2 i71 + 用J-? + 用if 1 - ”口 h i令系统的状态矢量为x = x1得状
5、态空间方程:x2 x3x4 z =01920102 ,X=AXBur = cx i即输入f - 01(000 200010 -3330-67.4810、0?r 0、010 20+-16,7400129.43-11.840620.82 丿而输出部分的故输出为1000/ y =.0100.01 Oj 01 02由于旋转倒立摆系统自身的特点,在没有控制或控制效果不佳的情况下很难稳定。对 于倒立摆的控制有和两个变量,只是对于这两个变量的控制并不能使倒立摆达到平衡,因 为除了位置信号以外还缺少了反映运动情况的信号,控制器必须在兼顾这些因素的情况下 进行对倒立摆的控制。所以在倒立摆的控制中要对e 1和e
6、-i,e 2和e -2一同考虑。(二)、分析:1、该次设计涉及到两个方面的控制,一个是向上摆动控制(起摆控制),即使的摆杆 由静止位置(垂直向下)旋转到向上并且以零角速度靠近垂直位置;一个是摆杆的平衡控 制。2、由于旋转倒立摆系统自身的特点,在没有控制或控制效果不佳的情况下很难稳定。 对于倒立摆的控制有和两个变量 ,只是对于这两个变量的控制并不能使倒立摆达到平衡 , 因为除了位置信号以外还缺少了反映运动情况的信号 ,控制器必须在兼顾这些因素的情况 下进行对倒立摆的控制。所以在倒立摆的控制中要对e 1和e 1, e 2和e 少一同考虑。 虽然选定了控制的参量,但是这里有一个问题:如果设计的模糊控
7、制器有 4 个输入,而每个 输入又选定7个词集的话,那么规则将有74 = 2401条,规则的编辑将变得十分复杂。而 且由于这些变量之间又存在着较强的耦合关系,控制的效果也将不是十分理想。于是我们 这样来设计,把e 1和e 1分为一组单独设计一个模糊控制器,e 2和e 2分为一组单独 设计一个 PD 控制器。这样分开后,不仅减少了模糊控制规则的数量,也使每个控制器有了 明确的控制对象, 控制规则的编写也变得相对简单了。本次设计我们主要进行的是模糊设 计,pd设计不作多少说明和分析。(三)、模糊控制器的设计:设计一个二维模糊控制器,其结构如图2所示图2 模糊控制器的结构将e 2和e 2的控制都分别
8、“负大”(NB)、“负中”(NM)、“负小”(NS)、“零” (ZE) 、“正小” (PS) 、“正中” (PM) 和“正大” (PB) 这 7 个语言变量值来描述,即 NB,NM,NS,ZE,PS,PM,PB模糊集,其中NB=负方向大的偏差(Negative Big)NM=负方向中的偏差(Negative Medium)NS=负方向小的偏差(Negative Small)ZO=近于零的偏差(Zero)PS=正方向小的偏差(Positive Small)PM=正方向中的偏差(Positive Medium)PB=正方向大的偏差(Positive Big)控制规则是模糊控制器的核心, 规则的正确
9、与否直接影响控制器的性能, 而规则 数目的多也是一个重要因素,通常用if.then的型式来表示。在这次课程设计中,我们把7*7=49条模糊规则全部写出,有:1 If theta is PB and d theta is ZO then u is PB2 If theta is ZO and d theta ix NB then u is NB3 If theta is NB and d theta is ZO then u is NB49 If theta is ZO and d theta is PB then u is PB 要是列表则有如下模糊控制规则表:表1模糊控制规川表NMNSZOP
10、SPMPBNBPBPBPBPMPMPSPSNMPBPBPMPMPSPSNSNSPBPMPMPSZONSNMZOPMPMPSZONSNMNMPSPMPSZONSNMNMNB寸模糊集合论域的选择上,这里取e 2的论域为对称的-112+过2 ,e _2勺论域也为对称的-12 + 12 ,输出mu的论域为对的-2.1 + 2.1 。在输入端或者输出端, 论域与实际控制量的匹配都以通过添加增益环节来进行调节。只要朮确地调节增益的大小, 便可以达到良好的匹配。在隶属曲线的选择上,3个模糊控制量都使用Mat lab模糊工具箱 中的默认三角型曲线,7个三角形在论域上平均分配,解决模糊的方法使用重心法。-12-
11、8 -斗 t) 4 S 12 衍/(1昭|)(b)控制器输入dtheta的隶属度函数图像NL NM NS I ZE PS PM PL(c)控制器输出变量mu的隶属度函数图像如此,一个二维的模糊控制器就建立好了,截面图如下图所示图 3 两输入一输出系统的图形界面图 4 隶属函数编辑器界面图 5 模糊规则编辑器界面在View菜单下执行ViewRules,激活模糊规则浏览器,观察规则推理是否正确。模 糊规则浏览器如图 12 所示。设有两个输入变量、一个输出变量,输入的论域均为-12 12, 输出变量的论域为-2.1 2.1,每个变量都有七个语言值,即在模糊集合论域上有七个三 角形隶属函数,那么最多有
12、 49 条规则。调整输入值的方法有两种,一种是用鼠标直接拖 拽红线到指定的位置,另一种是在input的输入框中输入数字。如图12所示,输入-1 0, 可以发现推理出来的结果为 0.193。File Edit View OptionsI111213141516171819202122232425262728293D.01 =-11111111HM =0u = 0.193图 6 模糊规则浏览器图形界面选择ViewSurface,就会出现输出结果的三维立体图,如图13所示。用鼠标可以直 接改变视角。观察模糊推理系统的输入、输出曲面。(四)、仿真图的建立:在 Simulink 里建立完整的旋转倒立摆的
13、模糊控制系统图如图 8 所示:eKeeCKu4.6Kacx = Ax+Bu y = Cx+DuGain4baiganHvote曰Gain3 xuanbiState-SpaceKa 一mu00sSaturationsi200KecTransfer FcnFuzzy Logic Controllerransfer Fcg1200ssi200Step根据专家经验,悬臂摆角的偏差el的论域维-90o 90。,即-1.57 1.57;偏差e2的论域为-80。80。, 即 -1.43 1.43;输出偏差e3的论域为-2.4 2.4。则三个K的取值为:1.57 x K1 = 121.43 x K2 = 12
14、2.1 x K = 2.4则K1 = 7.3则K2 = 8.4则 K = 1.15图8中的一些设定如下图所示:经多次实验调整,最后确定取比例增益为 24.6、微分增益为 3.1、模糊控制器角的比 例增益为 7.3、微分增益为 8.4, 输出电压增益设为 1.15。三、仿真结果及分析图15摆杆的转动角度e 2的输出波形由上面的仿真图可以看出倒立摆可以很好的跟踪位置信号的给定而运动,且运动过程 分为三个阶段:1)加速摆起过程:在最初的大概0.4秒内电机作加速运动,且速度很快,旋臂在电机 的带动下转动角度由开始的零逐渐增加,且随着电机转动的速度增加而便增加,同时摆杆 在旋臂带动下迅速摆起,具备相当的
15、动能,这是摆起的第一步;2)摆起制动过程:在摆起过程中,由图可看出摆杆一直落后于旋臂的运动,因此,必 须在加速结束之后给旋臂一个制动的信号,迅速减小旋臂的动能,同时给摆杆形成一个惯性 加速度,使摆杆再次加速,迅速达到倒立状态附近.。如果控制得比较好的话,就有可能使得 旋臂与摆杆都达到了控制要求;3)自由运动阶段:由图可看出,大约在2-5s的过程中,所有的运动都处于一个缓慢的 阶段,这起到一个缓冲的作用,保证比较平稳的过渡;4)平衡阶段:在5s后,旋臂的转动达到一个稳定值,而相对应的时间下,摆臂的角 度误差趋于 0,这就意味着倒立摆已经趋于平衡稳定了,这正是我们这一个多星期的期望 效果。四、设计
16、过程中遇到的问题比例增益为 24.6、微分增益为 3.1,但考虑到是负反馈,所以在电路图中设置应用-24.6、-3.1,缺少了这个负号仿真结果就大错特错,只能是发散的,不可能收敛,其仿 真图如下:图 16 错误的 vote 的输出波形图 18 错误的摆杆的转动角度波形五、课程设计结论旋转式倒立摆是一种新型的倒立摆系统, 由于它的非线性严重,在设计过程中将它线 性化,并主要采用了模糊控制法取得了很好的控制效果,即能使摆杆在平衡位置附近稳定 地倒立,并且有较好的鲁棒性、快速性和准确性。参考资料:1、模糊控制技术席爱民 编著 西安电子科技大学出版社2、模糊控制及其MATLAB应用张国良曾静柯熙政邓方林编西安交通大学出版社3、模糊控制系统的设计及稳定性分析 . 佟绍成 王涛 著 科学出版社.4、自动控制原理第4版M .胡寿松 著 科学出版社5、计算机模糊控制原理及应用M .北京:北京航空航天大学出版社
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
