 saber在机械上的应用
saber在机械上的应用

《saber在机械上的应用》由会员分享,可在线阅读,更多相关《saber在机械上的应用(8页珍藏版)》请在装配图网上搜索。
1、仿真在机械运动系统中的应用1摘要11背景与目的 电路仿真和控制算法仿真已经广泛应用于变频器开发过程当中,但是负载特性描述的比 较简单,通常为一般的恒定转矩负载,但是实际应用中机械负载的状况要复杂很多,为了准 确评估变频器在不同工作条件下的性能,本研究报告的目的在于研究Saber中关于机械仿真 的基本原理和方法,以及在公司变频器开发中的应用,实现通过仿真模拟不同负载条件下变 频器工作状况,为性能优化提供参考。12 关键词KCL,KVL,对偶,力,转矩,位移,角速度2机械仿真的基本原理Saber是一种基于KCL定理和KVL定理进行仿真的仿真器,除了可以分析电路以外, 它还可以对于流体,机械运动进行
2、分析,其中对于机械物体运动的分析,可以被应用在变频 器负载特性的分析当中。简单说明如下。21 机械与电的对偶关系机械系统与电路分析的对象一样,可以分为支路和节点,一个器件两个端点之间是一个 支路,而几个器件的连接点就是一个节点。两个节电之间的物理量之差被称为“ Across Variable ”,而穿过一个支路的物理量被称作Through Variable。对于电路仿真而言,“Across Variable ”是某个节点的电压,“Through Variable是某个支路的电流,而机械系统仿真中, Across Variable 是节点的位移(或者转动角度,角速度),Through Varia
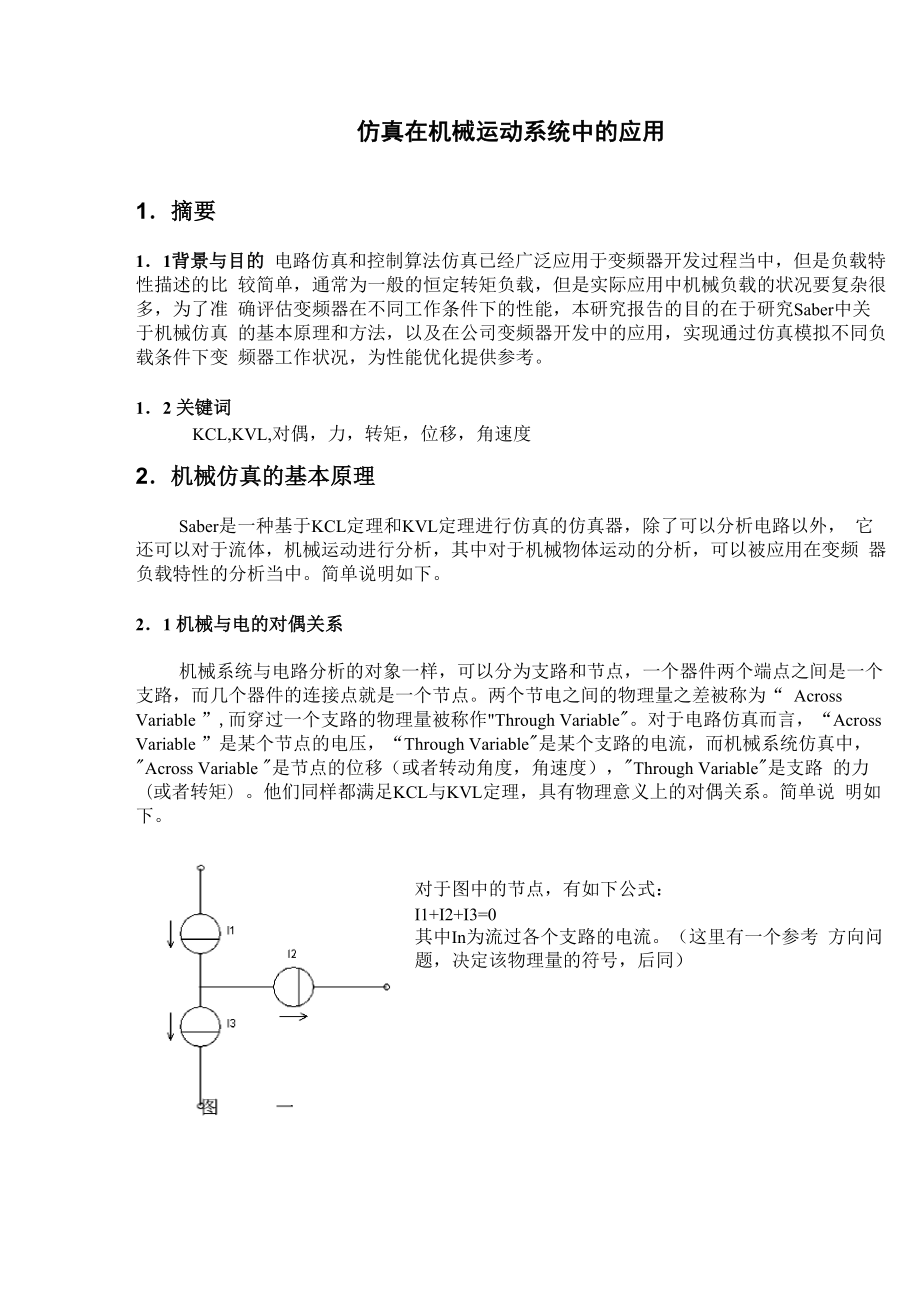
3、ble是支路 的力(或者转矩)。他们同样都满足KCL与KVL定理,具有物理意义上的对偶关系。简单说 明如下。对于图中的节点,有如下公式:I1+I2+I3=0其中In为流过各个支路的电流。(这里有一个参考 方向问题,决定该物理量的符号,后同)电路的 KCL 定理对于机械系统的 KCL 定理,则表示如下。电路的 KVL 定理,如图三:v2de对于图中的节点,有如下公式:f1+f2+f3=0其中 fn 应该为来自各个方向的作 用力,这个定理的基本含义就是作 用于某个点上面的各个方向力量之 和为零。具体到这个例子当中, f1 表示物体的重力,f2表示绳子的拉 力,二者之差f3,在物体上面产生 加速度。
4、对于图中所示的闭合回路,有如下公式V1-V2-V3=0即各个支路端电压之和为零。机械运动的 KVL 定理,如图四 对于图中所示的一个闭合回路,有如下 公式:lp1+lp2+lp3=0其中 lpn 表示各个支路两端的相对位移对于旋转机械运动系统,也有同样的等式,不过对象由力和位移对应为转矩和角度。3常用模型以及基本仿真方法Saber 中提供的机械运动模型可以分为两大类,平移运动和转动。它们的差别主要在于 变量类型的不同,转动系统的模型中变量是转矩,角度,角速度,角加速度;平移系统的模 型变量是力,位移,速度,加速度。等等,但是他们之间有很强的对偶特性,这部分主要以 一些简单例子,说明 SABER
5、 中机械仿真的基本思路。并尽量应用和电路仿真对偶的方法进 行讲解。31源 电路仿真中由电压源和电流源描述各种激励,对于于机械系统中,对偶的源如 下:电路电压源电流源平移系统力源位移源转动系统转矩源角度源这些源有各种不同形式:恒定,脉冲,正弦,斜坡等等,其中最常用的是平移系统中的 力源和转动系统中的转矩源,举例说明如图五图五上面的图形中,左边表示一个重力作用于一个物体的情况,右边表示一个转矩作用于 个转动惯量的情况。他们分别满足以下的公式:加速度=力/质量角加速度=转矩/转动惯量而仿真输出的结果分别是节点的位移,速度和转动角度,角速度,如图六图六32 负载 电路仿真中,电阻,电容,电感以及各种半
6、导体器件都可以被视为电路当中的负载,他 们对于作用在上面的电压和电流有不同响应,从而导致电路中这些物理量产生变化。同样的 道理,机械运动系统的仿真中,也有各种各样的负载状况,例如风机负载,恒转矩负载,摩 擦,粘滞等,他们对于不同的转矩(或者力)和角速度,角度(或者位移)也产生不同响应 当然也包括前面提到的转动惯量。Saber 提供了常用的负载模型,我们只需要输入一些常用参数,就可以得到他们的仿 真结果。以图七为例:fricls_wdft:5utrqw_dcvelMoment ofInertiaj:0.3图七左图中显示一个风机负载,而右图显示一个摩擦性负载,通过定义他们的参数,可以得 到他们对于
7、在相同输入转矩和转动惯量情况下的运动状况。图八中仿真结果显示了风机负载的速度,转矩以及速度转矩的相对关系。Graphl(rad/s)c -fan.fan1/tq_nm(uel)(N.m貝廉桂矩MrpBe(rad/s)c t(s)0.00.10.20.30.40.50.60.70.80.9t(s)1.0图八而图九的仿真结果显示了摩擦性负载速度,转矩以及速度转矩的相对关系。当然,实际中的负载状况比这个复杂,但是通过组合这些模型,基本上可以满足要求。33 机械装置Saber中还提供了很多机械装置的模型,例如滑轮,卷轴,皮带轮,齿轮等等。这些模型的主要作用是实现一些变换:力的大小与方向,速度的大小与方
8、向,以及平移系统 与转动系统之间的转换。下图中是一个提升装置,其中的关键部件是卷轴,它实现转矩到牵引力的转换过程,通过仿真,可以得到卷轴的角速度,被提升重物的速度这些指标。前面介绍的都是纯机械的部分,但是我们的分析机械的目的是研究电机性能,Saber中 提供了多种不同的电机模型:鼠笼电机,步进电机,直流永磁电机等等,当然,我们用的最 多的是二相鼠笼电机。如下图:在仿真中,它可以实现机电变量间的转换,求出各相电流以及 输出转矩。定义它的惯量,定子和转子的每相电感,漏感,电阻, 匝数等参数,可以求出它每相电流,电压以及输出转矩等。4应用实例基于以上原理, saber 可以用同一个仿真器完成机电混合
9、系统的分析,求解这些物理 量,特别对于电力拖动系统,可以完整的描述驱动电路到机械负载的工作情况。下面是一个典型的变频器仿真事例一一TD3000带势能负载在该图左边是电路单元,包括了三相逆变桥电路以及电流检测,速度检测电路;中间是 三相电机完成机电转换,以及实现空间矢量控制逻辑的 DSP 算法控制单元;右边是机械部 分,包含了传动齿轮,卷扬装置,阻尼,以及被提升的重物。从而对变频器的电路,算法, 机械特性进行全面的分析。通过仿真,可以得到电路中各项参数,以及物体运动参数,如下所示:三相电流物体位移,电机转矩和转速Graph240.0 n电崔連度608O22-82-通过这样的仿真,我们可以发现势能负载和恒转矩负载对于电机性能有不同要求,并在 此基础上面进行控制参数的优化。5总结1:机械系统仿真功能的应用,对于更好的理解和深入研究变频器系统在不同负载状况下 的性能具有重要的参考意义,其根本目的在于改进算法。2:对于组合负载的理解与应用,例如对于一个电梯,它可能要用到阻尼,弹簧等多种负 载组合描述他的机械运动特性,理解这些模型特性是准确仿真的前提。
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 化工过程开发导论教学课件
- PXGL05SSGF下的运营管理课件
- (部编版教材)三年级上册《金色的草地》经典ppt课件
- 第二课-展示自己的职业风采课件
- (新课标)高三化学一轮总复习第6章化学反应与能量变化同步测试卷ppt课件
- (新课标)高考数学大一轮复习第一章集合与常用逻辑用语1.1集合ppt课件文
- 第五讲法家思想现代解读课件
- 第二章-人工晶体的生长2122课件
- 第三章学前儿童身体保健教育分析课件
- (部编版)祖父的园子优秀ppt课件
- 第七章老年心理学-课件
- 趣味竞赛—成语猜猜看82张课件
- 化工过程开发与设计-绪论-第1章课件
- 路基路面弯沉试验(贝克曼梁)课件
- (部编版)小学语文一级上册《项链》教学ppt课件
