 微观交通仿真软件VISSIM使用介绍
微观交通仿真软件VISSIM使用介绍

《微观交通仿真软件VISSIM使用介绍》由会员分享,可在线阅读,更多相关《微观交通仿真软件VISSIM使用介绍(29页珍藏版)》请在装配图网上搜索。
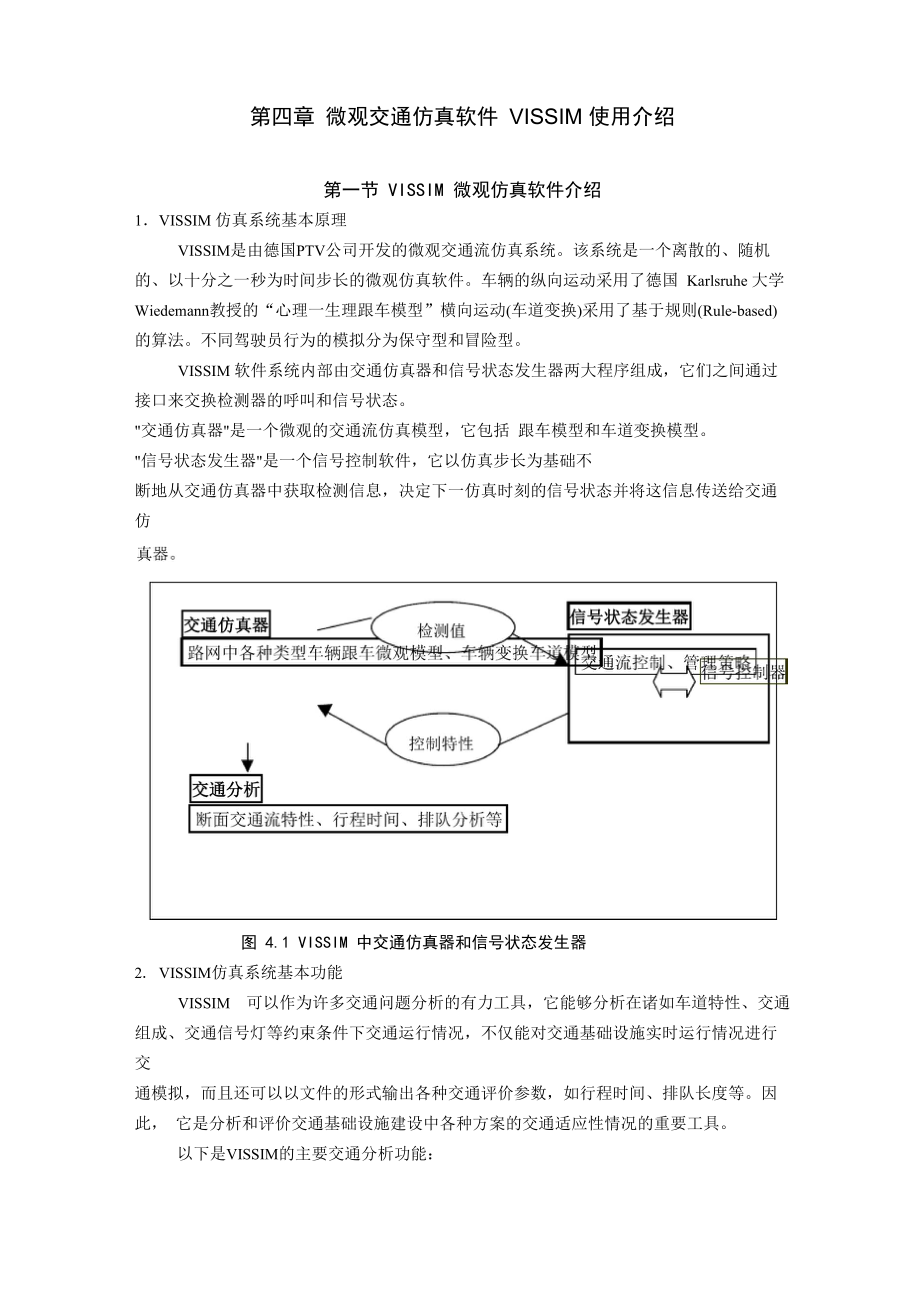
1、第四章 微观交通仿真软件 VISSIM 使用介绍第一节 VISSIM 微观仿真软件介绍1VISSIM 仿真系统基本原理VISSIM是由德国PTV公司开发的微观交通流仿真系统。该系统是一个离散的、随机 的、以十分之一秒为时间步长的微观仿真软件。车辆的纵向运动采用了德国 Karlsruhe 大学 Wiedemann教授的“心理一生理跟车模型”横向运动(车道变换)采用了基于规则(Rule-based) 的算法。不同驾驶员行为的模拟分为保守型和冒险型。VISSIM 软件系统内部由交通仿真器和信号状态发生器两大程序组成,它们之间通过 接口来交换检测器的呼叫和信号状态。 交通仿真器是一个微观的交通流仿真模
2、型,它包括 跟车模型和车道变换模型。 信号状态发生器是一个信号控制软件,它以仿真步长为基础不 断地从交通仿真器中获取检测信息,决定下一仿真时刻的信号状态并将这信息传送给交通仿图 4.1 VISSIM 中交通仿真器和信号状态发生器2. VISSIM仿真系统基本功能VISSIM 可以作为许多交通问题分析的有力工具,它能够分析在诸如车道特性、交通 组成、交通信号灯等约束条件下交通运行情况,不仅能对交通基础设施实时运行情况进行交 通模拟,而且还可以以文件的形式输出各种交通评价参数,如行程时间、排队长度等。因此, 它是分析和评价交通基础设施建设中各种方案的交通适应性情况的重要工具。以下是VISSIM的主
3、要交通分析功能:1、固定式信号灯配时方法的开发、评价及优化。2、能对各种类型的信号控制进行模拟,例如:定时控制方法、车辆感应信号控制方 法、SCATS和SCOOT控制系统中的信号控制等。在VISSIM中,交通信号配时策略还可以 通过外部信号状态发生器(VAP)来进行模拟,VAP允许用户设计自己定义的信号控制方法。3、可用来分析慢速区域的交通流交织和合流情况。4、可对各种设计方案进行对比分析,包括信号灯控制以及停车控制交叉口、环形交 叉口以及立交等5、分析公共交通系统的复杂站台设施的通行能力和运行情况。6、可用来评价公共交通优化处理的各种方案。7、可运用内置的动态分配模式分析和评价有关路径选择的
4、问题。例如:各种信息牌 对交通带来的冲击。3VISSIM 仿真流程YES输出优化后的方案图 4.2 VISSIM 软件仿真流程4VISSIM 操作界面介绍VISSIM的操作界面分为5个区域(如图4.3): 标题栏:显示仿真程序名称、文件名称、版本号。 菜单栏:设置、调整参数。 状态栏:第一部分:当前鼠标坐标。第二部分:网络编辑模式中,显示当前选择的对象信息;仿真过程中,显示仿真时间。第三部分:网络编辑模式中,显示编辑提示信息。 滚动条:上下翻滚视图。 工具栏:图形及模块工具。第二节 建立仿真路网 在微观交通仿真中,建立一个符合实际的仿真路网是交通仿真的基础,也是取得可用的 有效的仿真评价指标的
5、必要条件。建立仿真路网首先需要一张带比例尺的设计平面图,然后 在该底图上利用VISSIM软件中的路网单元模块(Link和Connector)建立路网。 1导入底图为了建立路网的仿真模型,首先必须导入仿真对象的现状平面图或设计平面图,且平面 图必须带比例尺。下文以平面十字交叉口仿真研究为例,建立路网的步骤如下:(1) 通过OptionsBackgroundOpen导入平面设计图的bmp文件。(2) 底图必需是BMP格式的图片。(3)通过 OptionsBackgroundScale 按比例缩放图片。(4)通过OptionsBackgroundOrgin手工拖/拉背景图片。5) 为了避免以后使用时
6、再次导入相同图片的繁琐程序,用户可以通过OptionsBackgroundParametersSave保存当前图片信息参数(保存文件格式为*.hgr)。图 4.4 导入 VISSIM 中的十字交叉口平面设计底图 2建立路网的方法VISSIM使用两个基本的组件(Link和Connector)来描述一个路网。 Link (路段):有方向性,是矢量。定义路段时需要输入该路段的车道数、车道宽度、 坡度等。按纽刁用于建立和移动Link。按纽兰用于编辑Link。 Connector(连接):用于连接同方向Link中的车道,每条Connector可以同时连接一条或几条车道。按纽匸!用于建立和编辑 Conne
7、ctor。 VISSIM通过Link和Connector来描述一条连续的路径,也可以描述整个路网。(1)定义Link (路段)Link (路段)单元参数设置对话框中包括以下各项内容:1)number:路段编号。2)Name:路段名称。3)Type:路段类型。4)Link Length :路段长度。5)NO. of Lanes:路段车道数6) Lane Widths:车道宽度。7) Gradient:路段坡度。8) Height:路段高度,仅在3D显示时生效,左右两格分别代表路段单元的起始 高度和终点高度。9) Opp.Direction :复制对向车道。10) NO. of Lanes:复制的
8、对向车道的车道数。11) Animation :打开/关闭车道上的车辆显示。12) Change Direct.:改变车道的方向。13) Cost.:计算行驶成本,仅在安装了动态分布功能的模块时生效。14) Evaluation:确定评价路段时所用区段(segment)的单位长度。15) Lane Closure. :车道关闭。可以禁止某类车辆在路段的某条车道上通行。 (可用于设置公交专用道、小汽车专用道等)Link DataNumber:Name:Type:Link Length:No. of Lanes:Lane Widths:Gradient:Height:I- Opp. Directi
9、onNo. of Lanes:P Animation|7 Label2dI- Segment Evaluation|1591R2.R7JEvaluation.Lane Closure图 4.5 Link 参数对话框Segment EvaluationChange Direct|ok1CancelSegment Length:(2)定义Connector (连接)单元Connector (连接)单元参数设置对话框中包括以下各项内容:1) Name:连接的名称。2) 在From Link和To Link两栏中可以选择起始路段和终止路段对应连接的车道(车 道数必须匹配)。3) Emerg.Stop:
10、紧急停车距离。要进入目标车道的车辆如果在车流量很大的情况下难以进入目标车道,它将在Emerg.Stop控制的地点停车,等候间隙变道。4)Lane Change:变换车道距离。 车辆为了进入目标车道开始 变换车道的距离(距前方连接 的距离)。5)Gradient:坡度。连接单元的 坡度。注意:连接单元的高程 由其两端的路段单元高程决 定。6)Points: Splines (连接曲线) 的插入点数。选择Spline可以 设置 Points 的插入点数,点数 越多,连接曲线越平滑;用户 也可以用鼠标右键在连接单 元上添加节点。7)大多数情况下, Direction 并不 起任何作用。只有当车辆被指
11、 定了转向以后(用丽按纽指 定),该选项才需要设置。未 被指定转向的车辆只通过 Direction 为 All 的连接单元。8)车道关闭(Lane Closure) 的 功能与路段单元相同,都是用 来禁止某种车辆通行的。9)Cost.和Evaluation.的功能与路段(Link )中介绍的相同。3路网建立实例在用Link和Connector建立交叉口和路网时,是用一个Link表示一条车道还是多条车 道、Connector如何连接等问题都要结合实际的道路情况而定。下文将以一个交叉口为实例 进行具体说明。在建立十字交叉口过程中需要处理好进口道Link的设置、车道展宽/缩减渐变段的处理、 进口道和
12、出口道的连接三个关键部分。(1)进口道路段的处理路段上如对车道功能无特殊划分(如设公交专用道),可用一条多车道的Link来表示, 如图4.6中五车道路段。如果两条车道功能完全不相同,并且车辆不能相互变换车道,最好用两条Link来表示。1JI |cc“ lcl rt cccc r c Lane change: 200.0 m back1加“遊3呎5图进口道车道设置示意图:(2)车道展宽/缩减渐变段的处理实际的道路上经常有车道增加和缩减的情况。车流在这种渐变段上的跟车行为、变换车道行为都与正常路段不同,更为复杂。VISSIM中仍然是通过Link和Connector单元来模拟, 因此若处理不当会造成
13、仿真的严重失真。车道展宽渐变段车道展宽渐变段因为车道数增多,通常很少有大的交通问题。图4.7 车道展宽渐变段是从三车道增加为四车道。可采用两种方案进行处理:方案一:一条 Connector(Connectorl)连三条车道(图 4.8),另一条 Connector(Connector2)连一条车道(图 4.9)。图 4.8 一条 Connector 连接三条车道图 4.9 一条 Connector 连接一条车道方案二:两条Connector分别连二条车道(见图4.10、图4.11)。图 4.10 Connector 分别连二条车道车道缩减渐变段车道缩减时的连接方法与车道增加时类似,只是方向相反
14、。但需要注意的是车道增加时 前面两种方案在效果上不会有什么差别。而车道缩减渐变段往往是交通瓶颈处,不同的处理 方法会有不同的效果。需要根据道路上实际的合流情况来确定。(3) 进口道和出口道的连接该交叉口的西进口共有五条车道,用三个Link来表示。每一个Link代表一个车道组。 所谓车道组(lane group)是指具有完全相同功能的车道组合。注意车辆在Link之间是不能 变换车道的,只能在同一Link内的不同车道之间才可以变换车道。该交叉口的北出口道用 一个Link来表示,因为这两条车道具有完全相同的功能。西进口的左转车道和北出口道用一个 Connector 连接,需要注意的是这里的 Conn
15、ector 与西进口道的 Link 连接段应尽量短。图 4.11 进口道和出口道的连接完成上述三个部分的设置后,就建立了一个平面交叉口的仿真路网图4.12。图 4.12 十字交叉口仿真路网建立实例第三节 交通流特性及行驶规则的设置在建立了仿真路网后,需要进行交通流特性参数及行驶规则的设置,以便真实地模拟实 际车流在路网中的运行。交通流特性参数可分为微观和宏观交通流特性;行驶规则应与实际 路网上的标志标线等交通控制和管理措施对应。1微观交通流特性参数 微观交通流特性参数包括各种车辆的期望车速分布曲线、车辆的加/减速特性、车辆的 几何尺寸、驾驶员行为参数设置等。(1)车辆的期望车速(Desired
16、 Speed)对于任何车辆,期望车速特性是一个极为重要的参数,对于车辆之间的跟车和变换车道 有重要的影响,并间接影响通行能力和行车速度。车辆期望车速设定后,每一类车辆进入仿 真系统时如果没有其它车辆干扰或其它交通规则限制,车辆将以该速度行驶(仅有一个较小 的随机变化量)。各车型的 Des.Speed 可以在 Network EditorDistributionDesired Speed 中定义,会出现图 4.13 的对话框。一般,在确定输入流量的车种组成时,定义每种车辆类型的期望车速,同时可以定义分布曲线。2SJ523Desired Speed DistributionsDeleteNo.Mi
17、nMax.Edit.New.0.63/ Desired Speed DistionClose45.060.050.050.130.040.025.030.020.025.015.020.04.06.0OKUndoCancel I52.5图 4.13 期望车速和分布曲线对话框(2) 车辆的加、减速特性车辆的加减速性能对于车辆的行驶性能有重要影响,并且车辆的加、减速特性会随着个 体车辆的不同而变化,车辆的期望加、减速与当前车辆速度以及司机的行为有关,而最大加、 减速度特性往往反映车辆自身的动力性能。VISSIM 在描述车辆加、减速特性时,是结合车辆类型进行定义的。共有四个参数,期 望加、减速度,最
18、大加、减速度。各种车型的加减速参数在Network EditorAcceleration中定义,通常采用默认值。(3) 车辆的几何尺寸车辆的车身长度直接影响车辆的跟车行为和超车行为,对变换车道也有影响。对车辆的 几何尺寸的描述包括长度和宽度,以及前后轴距等,见图4.14。VISSIM的2D模型中没有对车辆高度进行描述,在3D模型中车辆的高度是随长度和宽度 按比例自动确定的。仿真模型中的车道宽度对车辆的行驶没有影响,这点是与实际情况不相 符的。图 4.14 车辆几何尺寸设置对话框(4)驾驶员行为参数设置交通流理论中对驾驶员的跟车行为和变换车道行为都建立了相关的模型,VISSIM中所 依据的跟车模
19、型为德国卡尔斯鲁厄大学的Wiedemann教授于1974年和1997年分别建立的 城市道路跟车模型和高速公路跟车模型。驾驶员行为参数的设置可通过SimulationDriving Behavior中修改。如图4.15所示。 建议只有高级使用人员才能修改有关参数。图 4.15 驾驶员行为参数设置2宏观交通流特性参数 宏观交通流特性参数包括车型分类、交通量组成、流量输入、路径选择。(1)车型分类VISSIM 采用分级体系来定义车型分类,即车辆分级车辆类别车辆类型。车辆类型(Vehicle Types):是分级体系中最低层。指具有相似的技术特性和物理驾驶 行为的一组车。例如 carl、car2、LG
20、V、HGV、Bus、Tram、Bike、Pedestrian 等等。如下图所示。图 4.16 车辆类型对话框车辆类别(Vehicle Class):具有相似驾驶行为(但有不同的车辆特性)的一种或多种车 辆类型。速度评价、路径选择和一些其它的路网单元都是以车辆类别来分类的,例如:小客、 大客、小货等。车辆分级(Vehicle Category):是具有相似车辆行为的预设的、静态的分级。例如,分级 Tram不允许在多车道的Link上变换车道,也不会偏离它的期望车速。每一个车辆类型都被 分配到一个车辆分级。( 2 )交通组成 实际道路的交通流常常是大、小客货等车种混行。由于车辆自身的物理特性(如长度
21、等) 和动力性能(如加减速性能等)不同,它们在道路中的行驶特性,如各期望车速、车辆之间 的跟车和超车条件将不同。在微观仿真系统中,交通组成主要是反映车流中车型的特性。 对于车型的划分,根据车辆物理特性和技术性能加以区分,如大、小客货车、公交 车、拖挂车等。 车流中各类车型的比例,应符合实际交通流特点,反映时间和空间上的变化。例如, 路网中不同的节点和断面、不同的时段,交通流中车种比例都可能不同。交通组成(Traffic composition)通过 Network EditorTraffic Composition 来定义,用于 确定路网输入流量的各种车型和每种车型的流量比例及期望车速,如图
22、4.17。该对话框中的 Rel.Flow指各种车型的相对流量,这里既可以输入流量的绝对值,也可以输入各车型流量的 百分比。建议输入流量的绝对值。期望车速的定义同前文所述。图 4.17 交通组成对话框(3)输入流量 流量是交通仿真系统中最基本、最重要的参数之一。输入流量时注意以下三方面的问题:1)确定交通流产生地点。交通产生点的选取要设在研究区域以外,以免对研究区域产 生影响。建议在建立仿真路网时范围要较研究范围略大些。2)由于交通量在时间和空间上都是变化的,因此,对于不同交通流的产生点,应根据 实际情况来确定合理的起始时间和间隔。在仿真的全过程中,可以设置多个时间段, 每个时间段的输入流量各不
23、相同。3)仿真初始阶段,路网中车流是从无到有的,与实际路网上的情况不同。因此流量输 入的时间应该比要仿真的时段长些。具体时间视路网大小和仿真研究时段而定。按纽履I用于定义输入流量。进入流量对话框后,选择输入流量的车种组成、流量和时间间隔。如果要求精确生成指定的流量,则选择Generate exact number of vehicles栏。图 4.18 流量输入对话框(4)路径选择 道路设施中实际运行的车辆均有自己的出行目的地,为了反映交通流运行情况,进入仿 真系统的模拟车辆必须确定各自目的地。受标志标线的约束,不同车辆会选择不同的路径, 且这个过程较为复杂。在 VISSIM 中,有两种方式可
24、以实现车辆的路径选择。一种是动态路径选择的方式,由 驾驶员根据某种模式对路径进行选择,这种模式适用于网络分析;第二种是静态路径选择模 式,车辆最初在某一地点确定了行驶方向后,在行驶过程中,无论发生什么情况,都不会改 变路径,这种模式适用于“点”和“线”交通设施的交通分析。Routedecision )来定义的,右侧为相应的对话框。在 定义路径时需要首先确定路径选择生效的路段 起迄断面,然后确定该路径作用车辆的类型和 时间间隔,时间间隔可有多段,但彼此之间不 能重叠。每个路径选择都有一个起始端(图4.19 中 的红线所示),但可以有多个终点端(图 4.19 中绿线所示)。路径选择只在这两条线之间
25、的路 段间起作用。路径对应有多个终点端时,需要 考虑流量的分配,在图 4.19 对话框中所示的 Rel.flow 中,可以输入各条路径的流量比,也可 以输入各条路径的绝对流量值,建议输入绝对 值。在路径设置时需要注意下述问题: 对于单个交叉口而言,只需确定每个进口道车流的转向流量,可采用上图所示方法。 对于有多个交叉口的长路段,原则上可以用路径选择(Route decision)确定每个进 入主线车流的所有出口,但由于车流的OD (起迄点)信息很难得到,通常采用在 每个交叉口进口道前使用路径选择分配转向车流,保证每个进口道转向流量正确。 对于有多个交叉口的路网,使用静态的路径选择(Route
26、decision)难以描述路网中 复杂的车流运动情况,通常都采用动态路径选择来解决。图 4.19 路径定义对话框及示意图3车辆行驶规则 道路设施运行的交通流,往往受道路交通设施物理条件的约束、受相邻车辆的行驶约束、 以及交通规则和标志标线的约束。由于交通规则随时间和地点的不同会发生变化,因此,在 对仿真分析之前,必须对各种交通规则进行设定和描述。基本的车辆行驶规则包括:速度控制规则、超车规则、停让规则、优先规则和信号灯控 制规则。(1) 速度控制规则 在没有其它车辆及交通规则约束的情形下,车辆在道路设施上按照期望车速行驶。事实 上,随着流量的增加,道路行车条件的变化,往往在一定路段范围内对车辆
27、的速度进行限制。 待经过这些限制路段后,车辆的车速又恢复到正常值。通常,在道路等级有变化的主线上,相同的车辆在不同的主线路段上会有不同的期望车 速。因此,在道路等级变化点应改变各种类型车流的期望车速。在VISSIM中,对速度的控 制有两种描述方式:区段限速(reduced speed area)和改变期望速度(desired speed decision)。区段限谏设置适用于在某些特殊的路段和特殊的时间内对车辆进行速度限制,如匝道合流点。区段限 设置,对话框见图 4.20。区段限速标志的设置属性为: 需要限速的基本路段单元或基本连接单元的起点位置。 限速区域的长度。 限速有效时间。 速度限制的
28、有效车辆。图 4.20 区段限速对话框改变期望车速设置适用于道路等级变化点附近,例如从高架道路进入地面道路时,车辆的期望车速会改变。需要注意的是:VISSIM软件是根据车辆类型而不是根据道路等级来设置期望车速的,因此仿真过程中车辆不会随着道路等级的改变而自动改变期望车速。在这些情况下,必须实行强用于改变车辆的期望车速。(2)超车规则对于单向多车道高等级道路,由于行车速度较高,为防止车辆随意变换车道而引起交通 意外,一般规定右侧车道为行车道,左侧车道为超车道。车辆在试图超越前面车辆时,总是 从前面车辆的左侧超车,完成超车后,重新变换车道返回到原车道行车。在等级较低的路段,只要单方向是多车道,完成
29、超车后,规定车辆可以在车道之间随意 变换车道和超车。根据仿真对象涉及的不同道路等级,需要对超车规则作不同的设置。(3)优先规则设置优先规则是为了让两股有冲突的车流在冲突地区能够正常有序地通过。例如一条主 要道路和一条次要道路相交的交叉口,采用主路优先控制方式,即次要道路上进入交叉口的 车流必须放慢车速、了望观察,让主路车辆优先通行,并在主路车流间寻找可插入的空档(车 头时距或车头空距)通过交叉口。优先规则就是对这种可插入空档大小的规定。优先规则在 VISSIM 中的应用范围很广,原则上凡是两股车流产生冲突的地方(冲突点、 合流点)都应使用优先规则定义。优先规则的具体定义方法如下:在次要车流有可
30、能需要等待让行的断面设置Interrupted Section,在次要车流和主要车流可能产生冲突的地点设置Interrupting Section,此断面用于 判断主要道路上车流是否有足够的可插入空档,以便次要车流通过冲突点。 Min.Gap Time 和 Min.Headway 为最小车头时距和最小车头空距,具体意义为主要车道上 Interrupting Section 断面后第一辆车与该断面的车头时距和车关空距如果都大于规定的最小值,则次要 车道上的车辆允许通过该冲突点。Max.Speed指当主路上的车辆的车速低于该最大值时,此 优先规则生效。优先规则原则上是按车道来定义的,但也可以按多车
31、道定义。只要选中All lanes复选 框即可。优先规则可以对所有类型的车辆生效,也可以对具体某一种或几种车辆类型生效。图 4.21 优先规则设置对话框(4)停让规则停让规则是指车辆在交叉口停车让路。当次要交通流车辆到达交叉口时,无论主要交通 流车辆之间的车头时距是否允许穿越或合流,次要交通车流都必须先停车,然后再根据优先 规则来判断主要车流的车头时距和车头空距是否允许穿越或合流。停让规则用按业来设 置,需要定义的选项为: 停让规则标志牌所在位置。 停车时间分布的设定。在 Network EditorDistributionTime distribution 中设定。 停让规则应该与优先规则一
32、起使用,并且在两种规则的使用过程中,停让规则为第一规 则,优先规则为第二规则。(5) 信号灯控制规则VISSIM中,信号灯控制交叉口既可以使用固定配时信号控制系统,也可以使用外部信 号控制系统。在安装VAP模块以后,VISSIM还可以进行动态信号控制。如果安装了 TEAPAC组件后,VISSIM中可以导入PRETRANSYT、TRANSYT7F、SIGNAL97等控制方案。下面只简要介绍固定配时信号控制系统。Signal ConJutlctioum CSCJ)图 4.22 信号灯配时方案对话框信号灯的配时方案在Signal ControlEdit Signals中设置。通过4.22图所示的对话
33、框可 以新建、编辑、复制和删除信号灯配时方案。 SCJ 指信号控制器,一个 SCJ 可以控制 125 个信号组 Signal Group。 Signal Group 相当于相位。一个固定配时的信号灯的基本参数是周期(Cycle Time)、绿时差(Offset)和相位(SignalGroups)时长及相序。其中相位时长的设置需要确定上一相位的红灯结束时间(Red End)和 本相位的绿灯结束时间(Green End)。第四节 评价参数检测器设置VISSIM 可以对路网的的交通运行状况进行实时动画效果仿真评价,同时可以通过一系 列评价指标进行定量分析和评价。由于微观仿真系统可以对每辆车的运行情况
34、进行跟踪记 录,因此不仅可以得到路网的各种常用评价指标,还可以根据评价需要,得到一些特殊的评 价指标。系统将这些评价指标以文本形式输出后,供专业人员进行交通分析。VISSIM 的评价指标和形式非常丰富,下文对常用的三大类评价指标断面交通流特 征参数、路段交通流特征参数、排队特征参数作详细介绍。其它有关评价指标和形式可参考 VISSIM 软件使用说明书。1断面交通流特征参数检测断面交通流特征参数主要包括:断面交通流量、断面平均速度、断面平均加速度、占有 率、乘客数量等。断面交通流的一系列特征参数可以通过数据采集器(Data Collection)进行采集。通过OptionsEvaluationF
35、iles打开Data Collection的输出控制面板,对所要米集的参数类型 及统计时间间隔等进行配置。数据采集器放置于道路横断面的每一根车道上,设置的属性为: 检测参数的类型。 采集器的位置。 采集器工作的时段,即采集器工作的总时段以及统计数据的时间间隔。 检测车型。即采集器采集的有效车辆及其分类。2路段交通流特征参数检测常用的路段交通流特征参数包括:路段行程时间、路段平均行程车速、路段总延误、平 均延误、平均停车次数、平均停车延误等。这些参数在仿真中可通过行程时间检测器(Travel Time Measuremnet)直接检测得到或由直接检测值计算得到(如路段平均行程车速)。行程时间检测
36、器(按纽为厠),分别设置在检测路段的起、终点。通过Options EvaluationFiles 打开 Travel Time Measuremnet 的输出控制面板。配置参数通过右图所示的 对话框修改。包括检测器生效 的起始时刻和终止时刻,检测 器评价的时间段(Interval)。如 右图中检测器生效的时间共 3600 秒,采用的评价时间段也 为 3600 秒,则最后生成一个评 价结果。如果评价采用的时间 段改为 600 秒,则最后将生成 6 个分时间段的评价结果。这对 需要分别评价仿真路网的高峰 和平峰时的行程时间很有用。行程时间检测器在检测行程时间的同时, 还能检测车辆路段延误的信息。通
37、过Options EvaluationFiles 打开 Delay Time 的输出控制 面板,设置与 Travel Time 类似。可得到的评价 结果包括: Delay-平均每辆车的延误时间(秒)(包括停车延误和路段延误时间)。 Stopd平均每辆车的停车时间(秒) Stops 所有车辆进入排队的状态总次 数(总停车数)。 #Veh通过该路段的车辆数。 Pers平均每位乘客延误时间。 #Pers 乘客通过总数。延误评价设置的相关参数和行程时间检测 器中的设置相似,意义相同。3排队特征参数检测常用的排队特征参数包括:最大排队长度、平均排队长度、排队车辆数、停车率等 在VISSIM中用排队计数器
38、(Quene Counter)对排队参数进行检测。排队计数器(按纽为)一般设置在交叉口进口道的停车线断面位置,是以Link为单位进行设置的。通过OptionsEvaluationFiles打开Quene Counter的输出控制面板,可对检 测器进行配置。如右对话框所示,首先明确定义排队这个 概念。排队末端车辆:指处于排队状态的最后一 辆车。排队末端跟随车辆:指紧跟于排队末端车 辆的那辆车。Max.Headway:指跟随车辆距离排队末端 车辆的距离。Begin 中的车速:当跟随车辆的行驶车速 如果低于该值,并且它与排队末端车辆之间的 距离低于 Max.Headway 中定义的车头空距, 则该车计入到排队长度中去。End 中的车速:如果跟随车辆的行驶车速 高于该值,并且它与排队末端车辆之间的距离 高于Max.Headway规定值,则不计入到排队长度中去。其中的检测器生效的起始时刻和终止时刻及评价时间段的含义和行程时间检测器相同。
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
