 自动控制原理课件:第6章 线性系统的校正方法
自动控制原理课件:第6章 线性系统的校正方法

《自动控制原理课件:第6章 线性系统的校正方法》由会员分享,可在线阅读,更多相关《自动控制原理课件:第6章 线性系统的校正方法(67页珍藏版)》请在装配图网上搜索。
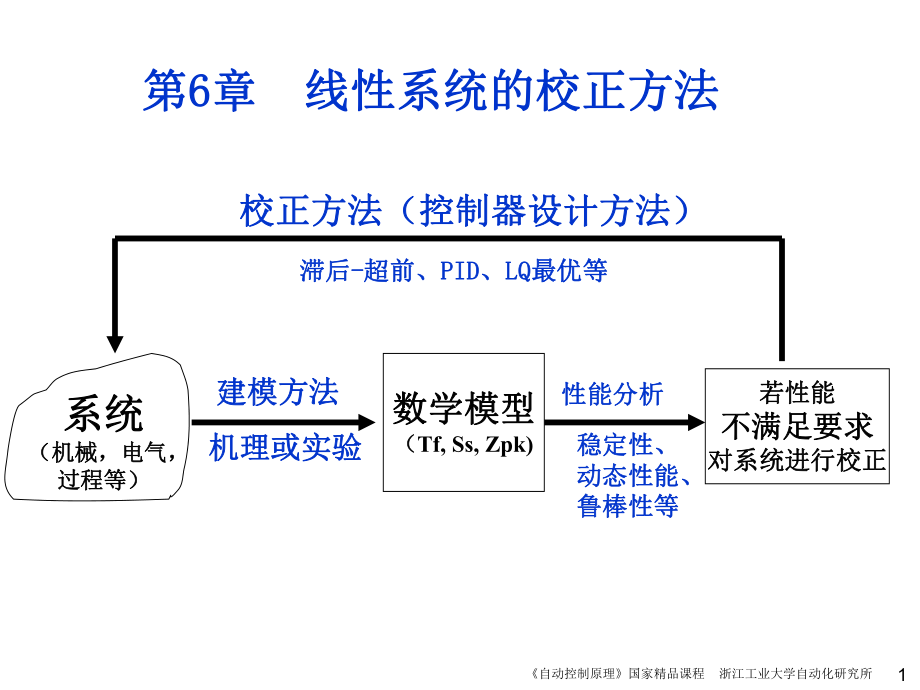
1、自动控制原理国家精品课程 浙江工业大学自动化研究所1系统系统 (机械,电气,(机械,电气,过程等)过程等)建模方法建模方法机理或实验机理或实验数学模型数学模型(Tf,Ss,Zpk)性能分析性能分析稳定性、稳定性、动态性能、动态性能、鲁棒性等鲁棒性等若性能若性能不满足要求不满足要求对系统进行校正对系统进行校正校正方法(控制器设计方法)校正方法(控制器设计方法)滞后滞后-超前、超前、PIDPID、LQLQ最优等最优等 第第6 6章章 线性系统的校正方法线性系统的校正方法自动控制原理国家精品课程 浙江工业大学自动化研究所26.1 控制系统校正的概念控制系统校正的概念6.2 超前校正超前校正6.3 滞
2、后校正滞后校正6.4 滞后滞后-超前校正超前校正6.5 串联校正的综合法串联校正的综合法6.6 Simulink在控制系统仿真中的应用在控制系统仿真中的应用自动控制原理国家精品课程 浙江工业大学自动化研究所36.1 控制系统校正的概念控制系统校正的概念6.1.1 控制系统的设计步骤控制系统的设计步骤6.1.2 校正的概念与校正方案校正的概念与校正方案6.1.3 校正方法校正方法自动控制原理国家精品课程 浙江工业大学自动化研究所46.1.1 控制系统的设计步骤控制系统的设计步骤(1)拟定性能指标)拟定性能指标(2)初步设计)初步设计1)根据设计任务和设计指标,初步确定比较合理的设计方案,)根据设
3、计任务和设计指标,初步确定比较合理的设计方案,选择系统的主要元部件,拟出控制系统的原理图。选择系统的主要元部件,拟出控制系统的原理图。2)建立所选元部件的数学模型,并进行初步的稳定性分析和动态性能分析。)建立所选元部件的数学模型,并进行初步的稳定性分析和动态性能分析。一般来说,这时的系统虽然在原理上能够完成给定的任务,一般来说,这时的系统虽然在原理上能够完成给定的任务,但系统的性能一般不能满足要求的性能指标。但系统的性能一般不能满足要求的性能指标。3)对于不满足性能指标的系统,可以在其中再加一些元件,)对于不满足性能指标的系统,可以在其中再加一些元件,使系统达到给定的性能指标。使系统达到给定的
4、性能指标。4)分析各种方案,选择最合适的方案。)分析各种方案,选择最合适的方案。(3)原理试验)原理试验(4)样机生产)样机生产自动控制原理国家精品课程 浙江工业大学自动化研究所56.1.2 校正的概念与校正方案校正的概念与校正方案一个很自然的想法就是在已有系统中加入一些参数和结构可以调整的装置,一个很自然的想法就是在已有系统中加入一些参数和结构可以调整的装置,来改善系统特性。从理论上来讲这是完全可以的,来改善系统特性。从理论上来讲这是完全可以的,因为加入了校正装置就改变了系统的传递函数,也就改变了系统的动态特性。因为加入了校正装置就改变了系统的传递函数,也就改变了系统的动态特性。校正就是在系
5、统不可变部分的基础上,加入适当的校正元件,校正就是在系统不可变部分的基础上,加入适当的校正元件,使系统满足给定的性能指标。使系统满足给定的性能指标。初步设计出的系统一般来说是不满足性能指标要求的。初步设计出的系统一般来说是不满足性能指标要求的。自动控制原理国家精品课程 浙江工业大学自动化研究所6(1)(1)串联校正串联校正)(sGc为校正环节的传递函数为校正环节的传递函数。sHsGsGs001校正前系统的闭环传递函数校正前系统的闭环传递函数 sHsGsGsGsGsccc001校正后系统的闭环传递函数为校正后系统的闭环传递函数为 自动控制原理国家精品课程 浙江工业大学自动化研究所7(2)(2)并
6、联校正并联校正 sHsGsGsGsGsGsGs3213211校正前,系统的闭环传递函数为校正前,系统的闭环传递函数为并联校正后,系统的闭环传递函数为并联校正后,系统的闭环传递函数为 sHsGsGsGsGsGsGsGsGsccc3213211自动控制原理国家精品课程 浙江工业大学自动化研究所8 (3)反馈校正)反馈校正 sHsGsGsGsGsGsGs3213211校正前,系统的闭环传递函数为校正前,系统的闭环传递函数为反馈校正后,系统的闭环传递函数为反馈校正后,系统的闭环传递函数为 sHsGsGsGsGsGsGsGsGsHsGsGsGsGsGsGsGsGsGsGscccc321232132213
7、2211111自动控制原理国家精品课程 浙江工业大学自动化研究所9 (4)前馈校正)前馈校正自动控制原理国家精品课程 浙江工业大学自动化研究所106.1.3 6.1.3 校正方法校正方法确定了校正方案以后,下面的问题就是如何确定校正装置的确定了校正方案以后,下面的问题就是如何确定校正装置的结构和参数。目前主要有两大类校正方法:分析法与综合法。结构和参数。目前主要有两大类校正方法:分析法与综合法。分析法又称为试探法。这种方法是把校正装置归结为易于实现分析法又称为试探法。这种方法是把校正装置归结为易于实现的几种类型。例如,超前校正、滞后校正、滞后的几种类型。例如,超前校正、滞后校正、滞后超前校正等
8、,超前校正等,它们的结构是已知的,而参数可调。它们的结构是已知的,而参数可调。综合法又称为期望特性法。它的基本思想是按照设计任务所综合法又称为期望特性法。它的基本思想是按照设计任务所要求的性能指标,构造期望的数学模型,然后选择校正装置要求的性能指标,构造期望的数学模型,然后选择校正装置的数学模型,使系统校正后的数学模型等于期望的数学模型的数学模型,使系统校正后的数学模型等于期望的数学模型。系统的校正可以在时域内进行,也可以在频域内进行。本章介绍系统的校正可以在时域内进行,也可以在频域内进行。本章介绍频域设计方法。用频域法进行校正比较简单,但频域法的设计指频域设计方法。用频域法进行校正比较简单,
9、但频域法的设计指标是间接指标。标是间接指标。自动控制原理国家精品课程 浙江工业大学自动化研究所116.2 超前校正超前校正6.2.1 超前校正及其特性超前校正及其特性 6.2.2 用频域法确定超前校正参数用频域法确定超前校正参数6.2.3 超前校正装置超前校正装置自动控制原理国家精品课程 浙江工业大学自动化研究所126.2.1 6.2.1 超前校正及其特性超前校正及其特性 1,11)(aTsaTssGcTam1自动控制原理国家精品课程 浙江工业大学自动化研究所1302468101214161820Magnitude(dB)10-310-210-110010110203060Phase(deg)
10、Bode DiagramFrequency (rad/sec)20log a10log aa=10,T=1 10.1自动控制原理国家精品课程 浙江工业大学自动化研究所14 (1)最大补偿相角最大补偿相角mmjTjaTjGc11)(TtgaTtgc11)(22)(1)(1)(TTaTaTddc0)(ddcTam111sin211111111111111aaaatgaaaatgatgatgTaTtgTaaTtgm11sin1maaTam1可以看出可以看出,m只与只与a a有关。这一点对于超前校正的设计是相当重要的。有关。这一点对于超前校正的设计是相当重要的。自动控制原理国家精品课程 浙江工业大学自
11、动化研究所1502468101214161820Magnitude(dB)10-310-210-110010110203060Phase(deg)Bode DiagramFrequency (rad/sec)051015202530Magnitude(dB)10-310-210-11001011020306090Phase(deg)Bode DiagramFrequency (rad/sec)0510152025303540Magnitude(dB)10-410-310-210-11001011020306090Phase(deg)Bode DiagramFrequency (rad/sec)
12、a=100,T=1 a=20,T=1 a=10,T=1 02468101214Magnitude(dB)10-210-11001011020510152025303540Phase(deg)Bode DiagramFrequency (rad/sec)a=4,T=1 40db20db30db14db90906040jTjaTjGc11)(自动控制原理国家精品课程 浙江工业大学自动化研究所160100200300400500600700800900100001020304050607080900102030405060708090100010203040506070800510152025303
13、5404550010203040506070800246810121416182001020304050607011sin1maa11sin1maa11sin1maa11sin1maa自动控制原理国家精品课程 浙江工业大学自动化研究所170510152025303540Magnitude(dB)10-410-310-210-11001011020306090Phase(deg)Bode DiagramFrequency (rad/sec)(2)PD(2)PD调节器调节器如果超前校正环节的惯性较小,则传递函数可近似为一阶微分环节,即如果超前校正环节的惯性较小,则传递函数可近似为一阶微分环节,即
14、ssGc1)(10-410-310-210-110004590Phase(deg)Bode DiagramFrequency (rad/sec)010203040Magnitude(dB)自动控制原理国家精品课程 浙江工业大学自动化研究所18 (1)设计指标)设计指标依据的不是时域指标而是频域指标。通常采用相角依据的不是时域指标而是频域指标。通常采用相角裕量等表征系统的相对稳定性,用开环截止频率裕量等表征系统的相对稳定性,用开环截止频率c表征系统的快速性。当给定的指标是时域指标时,表征系统的快速性。当给定的指标是时域指标时,首先需要转化为频域指标,才能够进行频域设计首先需要转化为频域指标,才能
15、够进行频域设计。6.2.2 6.2.2 用频域法确定超前校正参数用频域法确定超前校正参数自动控制原理国家精品课程 浙江工业大学自动化研究所19 (2)一般设计步骤)一般设计步骤1)根据给定的稳态指标,确定系统的开环增益根据给定的稳态指标,确定系统的开环增益K。因为超前校正不改。因为超前校正不改 变系统的稳态指标,所以第一步仍然是先调整放大器,使系统满足变系统的稳态指标,所以第一步仍然是先调整放大器,使系统满足 稳态性能指标。稳态性能指标。2)利用利用1)求得的)求得的K,绘制系统的伯德图。,绘制系统的伯德图。3)在伯德图上量取未校正系统的相位裕量和幅值裕量,并计算为使在伯德图上量取未校正系统的
16、相位裕量和幅值裕量,并计算为使 相位裕量达到给定指标所需补偿的超前相角相位裕量达到给定指标所需补偿的超前相角 m0mmasin1sin1 4)取取 即所需补偿的相角由超前校正装置来提供即所需补偿的相角由超前校正装置来提供。5)使超前校正装置的最大超前相角出现在校正后系统的截止频率)使超前校正装置的最大超前相角出现在校正后系统的截止频率 cm 6)由)由 Tam1计算参数计算参数T TsaTssGc11)(7)校验指标:绘制系统校正后的伯德图,检验是否满足给定的性能指标。)校验指标:绘制系统校正后的伯德图,检验是否满足给定的性能指标。自动控制原理国家精品课程 浙江工业大学自动化研究所20 解解
17、1 1)根据给定的稳态指标,确定符合要求的开)根据给定的稳态指标,确定符合要求的开环增益环增益K K。本例要求在单位斜坡输入信号作用。本例要求在单位斜坡输入信号作用下下 ,1.0sse4.4 c045dBh10例例6.1 6.1 设控制系统如图所示。若要求系统在单位斜坡输入信号作用下,位置设控制系统如图所示。若要求系统在单位斜坡输入信号作用下,位置 输出稳态误差输出稳态误差,开环系统截止频率,开环系统截止频率。相角裕度。相角裕度 幅值裕度幅值裕度1.0sse1.01Kess10K 说明校正后的系统仍应是说明校正后的系统仍应是1 1型系统,因为型系统,因为,所以应有,所以应有,取,取K=10K=
18、10。试选择超前校正参数。试选择超前校正参数。2)绘制原系统的伯德图如图所示。绘制原系统的伯德图如图所示。10-210-1100101102-180-135-90System:sysFrequency(rad/sec):2.95Phase(deg):-161Phase(deg)Bode DiagramFrequency (rad/sec)-100-80-60-40-20020406080100Magnitude(dB)System:sysFrequency(rad/sec):3.01Magnitude(dB):0.406自动控制原理国家精品课程 浙江工业大学自动化研究所2110-210-110
19、0101102-180-135-90System:sysFrequency(rad/sec):2.95Phase(deg):-161Phase(deg)Bode DiagramFrequency (rad/sec)-100-80-60-40-20020406080100Magnitude(dB)System:sysFrequency(rad/sec):3.01Magnitude(dB):0.406例例6.1 未校系统的伯德图未校系统的伯德图 自动控制原理国家精品课程 浙江工业大学自动化研究所223)相角裕量也可以由计算得到相角裕量也可以由计算得到0100018390180tg000003710
20、1845rOm37437sin137sin1sin1sin1sin1sin100mmadB4lg105.44)做做 直线与未校正系统对数幅频特性曲线相交于直线与未校正系统对数幅频特性曲线相交于,取取 5.4 mc满足满足4.4 c的要求。的要求。911maT5)超前校正的传递函数为)超前校正的传递函数为sssGc911941)(Tam1自动控制原理国家精品课程 浙江工业大学自动化研究所2310-1100101102103010203040System:sysFrequency(rad/sec):4.5Phase(deg):36.9Phase(deg)Bode DiagramFrequency
21、(rad/sec)051015System:sysFrequency(rad/sec):4.58Magnitude(dB):6.11Magnitude(dB)例例6.1 校正环节的伯德图校正环节的伯德图 自动控制原理国家精品课程 浙江工业大学自动化研究所24Bode DiagramFrequency (rad/sec)-100-80-60-40-20020406080100System:sysFrequency(rad/sec):4.56Magnitude(dB):-0.475System:CsFrequency(rad/sec):4.58Magnitude(dB):6.12Magnitude
22、(dB)System:sys1Frequency(rad/sec):3Magnitude(dB):0.43110-210-1100101102103-180-135-90-45045System:sys1Frequency(rad/sec):3.01Phase(deg):-162System:sys1Frequency(rad/sec):4.59Phase(deg):-168System:CsFrequency(rad/sec):4.53Phase(deg):36.9Phase(deg)System:sysFrequency(rad/sec):4.56Phase(deg):-131例例6.1
23、校正前、后系统的伯德图校正前、后系统的伯德图 自动控制原理国家精品课程 浙江工业大学自动化研究所250246810121416182000.20.40.60.811.21.41.61.8Step ResponseTime(sec)Amplitude例例6.1 校正前、后系统的单位阶跃响应曲线校正前、后系统的单位阶跃响应曲线 自动控制原理国家精品课程 浙江工业大学自动化研究所2600.20.40.60.811.21.41.61.8200.20.40.60.811.21.41.61.82X:1.2Y:1.099例例6.1校正后系统的单位斜坡响应曲线校正后系统的单位斜坡响应曲线 2Out21Out1
24、10s +s2Transfer Fcn14/9s+11/9s+1Transfer FcnScopeRamp1GainAdd自动控制原理国家精品课程 浙江工业大学自动化研究所27sCRsCRRRsEsMsGc11)()()(1122CsRRRR11221CsRRRRCsRRRRCsRRRRCsRRR212112122121212111221RRRaCRRRRT2121TsaTsasG111)(1aCRRRRTRRRa2121221(1)无源超前校正网络)无源超前校正网络6.2.3 6.2.3 超前校正装置超前校正装置 自动控制原理国家精品课程 浙江工业大学自动化研究所28(2)有源超前校正网络)
25、有源超前校正网络1)PD控制器:控制器:211301()eRuRedumuCRRdtdtdeCRReRRRmReR123123111eRRRdtdeCRRRm132213)(3232132edtdeCRRRRRRR132RRRKcCRRRR3232)(edtdeKmc)1()(sKsGcc自动控制原理国家精品课程 浙江工业大学自动化研究所29 2)带惯性的)带惯性的PD控制器控制器 42123110()0dueR CuRdtReeduRCRmRRdt03132mdtduCReRRRueRReRRRRRmRR123132434)(0)(13213244132mdtdeCRRRdtdeCRRRRd
26、tdmCReRRReRRRdtdeCRRRRRRRmdtdmCR13214342324)(32434232132edtdeCRRRRRRRRRRRCRT4CRRRRRRRRaT32434232132RRRKc)(edtdeaTKmdtdmTc1)1()(TsaTsKsGcc自动控制原理国家精品课程 浙江工业大学自动化研究所306.3 滞后滞后校正校正6.3.1 滞后滞后校正及其特性校正及其特性 6.3.2 用频域法确定用频域法确定滞后滞后校正参数校正参数6.3.3 滞后校正装置滞后校正装置自动控制原理国家精品课程 浙江工业大学自动化研究所316.3.1 6.3.1 滞后校正及其特性滞后校正及其
27、特性 1,11)(aTsaTssGc10-210-1100101102103-60-300Phase(deg)Bode DiagramFrequency (rad/sec)-20-18-16-14-12-10-8-6-4-20Magnitude(dB)自动控制原理国家精品课程 浙江工业大学自动化研究所32具有相位滞后,相位滞后会给系统特性带来不良影响。具有相位滞后,相位滞后会给系统特性带来不良影响。解决这一问题的措施之一是使滞后校正的零极点靠得很近,使之产生的滞解决这一问题的措施之一是使滞后校正的零极点靠得很近,使之产生的滞后相角很小,这是滞后校正零极点配置的原则之一;后相角很小,这是滞后校正
28、零极点配置的原则之一;措施之二是使滞后校正零极点靠近原点,尽量不影响中频段,这是滞后校措施之二是使滞后校正零极点靠近原点,尽量不影响中频段,这是滞后校正零极点配置的原则之二。正零极点配置的原则之二。10-210-1100101102103-60-300Phase(deg)Bode DiagramFrequency (rad/sec)-20-18-16-14-12-10-8-6-4-20Magnitude(dB)自动控制原理国家精品课程 浙江工业大学自动化研究所33从伯德图幅频特性可以看出,滞后校正的高频段是负增益,从伯德图幅频特性可以看出,滞后校正的高频段是负增益,因此,滞后校正对系统中高频噪
29、音有削弱作用,增强抗扰能力。因此,滞后校正对系统中高频噪音有削弱作用,增强抗扰能力。我们将利用滞后校正的这一低通滤波所造成的高频衰减特性,降低系统的我们将利用滞后校正的这一低通滤波所造成的高频衰减特性,降低系统的截止频率,提高系统的相位裕度,以改善系统的暂态性能,这是滞后校正截止频率,提高系统的相位裕度,以改善系统的暂态性能,这是滞后校正的作用之一。的作用之一。10-210-1100101102103-60-300Phase(deg)Bode DiagramFrequency (rad/sec)-20-18-16-14-12-10-8-6-4-20Magnitude(dB)“超前校正超前校正”
30、是利用超前网络的超前特性是利用超前网络的超前特性,但但“滞后校正滞后校正”并不是利用相并不是利用相位的滞后特性,而是利用其高频衰减特性位的滞后特性,而是利用其高频衰减特性。滞后校正相对超前校正来说,具有完全不同的概念。滞后校正相对超前校正来说,具有完全不同的概念。自动控制原理国家精品课程 浙江工业大学自动化研究所34a1a1a1如果在滞后校正网络后串联一个放大倍数为如果在滞后校正网络后串联一个放大倍数为 的放大器,则对数的放大器,则对数幅频特性变为如图幅频特性变为如图7.177.17所示,而相频特性不变。所示,而相频特性不变。这时中高频增益为这时中高频增益为0db0db,因此滞后校正不影响系统
31、的中高频特性,因此滞后校正不影响系统的中高频特性,但低频增益增加了但低频增益增加了20lg 20lg dB,滞后校正利用这一特性,提高了系统的稳态精度,而又不改变系统滞后校正利用这一特性,提高了系统的稳态精度,而又不改变系统暂态性能,这是滞后校正的作用之二。暂态性能,这是滞后校正的作用之二。系统串联滞后校正环节后,能够在保证暂态性能不变的前提下,系统串联滞后校正环节后,能够在保证暂态性能不变的前提下,允许把开环增益提高允许把开环增益提高倍,而不是它本身能把开环增益提高。倍,而不是它本身能把开环增益提高。自动控制原理国家精品课程 浙江工业大学自动化研究所35 3)在原系统的伯德图上量取在原系统的
32、伯德图上量取6.3.2 6.3.2 用频率法确定滞后校正参数用频率法确定滞后校正参数 1)按稳态性能指标要求的开环放大系数绘制)按稳态性能指标要求的开环放大系数绘制 未校正系统的伯德图。未校正系统的伯德图。2)在原系统的伯德图上找出相角为在原系统的伯德图上找出相角为)180(0的频率作为校正后系统的截止频率的频率作为校正后系统的截止频率 )(0cL的分贝值,的分贝值,c并令并令 ajGc1lg20)(lg20 0由此确定参数由此确定参数a(a1)4)取)取 )10151(1caT并由并由a求参数求参数T 5)绘制校正后系统的伯德图,校验各项性能指标)绘制校正后系统的伯德图,校验各项性能指标 自
33、动控制原理国家精品课程 浙江工业大学自动化研究所36Bode DiagramFrequency (rad/sec)10-210-1100101102-270-225-180-135-90System:sysFrequency(rad/sec):1.87Phase(deg):-195Phase(deg)System:sysFrequency(rad/sec):0.487Phase(deg):-130-120-100-80-60-40-20020406080System:sysFrequency(rad/sec):1.85Magnitude(dB):-0.572Magnitude(dB)Syste
34、m:sysFrequency(rad/sec):0.477Magnitude(dB):19.3例例6.2 设控制系统不可变部分的传递函数为设控制系统不可变部分的传递函数为)15.0)(1()(0sssKsG要求:要求:5vK 040dBKg10试确定滞后校正参数试确定滞后校正参数a,T 解解 1)取)取K=5使系统满足稳态性能要求。按使系统满足稳态性能要求。按K=5绘制原系统绘制原系统伯德图。伯德图。自动控制原理国家精品课程 浙江工业大学自动化研究所37Bode DiagramFrequency (rad/sec)10-210-1100101102-270-225-180-135-90Syst
35、em:sysFrequency(rad/sec):1.87Phase(deg):-195Phase(deg)System:sysFrequency(rad/sec):0.487Phase(deg):-130-120-100-80-60-40-20020406080System:sysFrequency(rad/sec):1.85Magnitude(dB):-0.572Magnitude(dB)System:sysFrequency(rad/sec):0.477Magnitude(dB):19.3例例6.2 未校系统的伯德图未校系统的伯德图 自动控制原理国家精品课程 浙江工业大学自动化研究所38
36、线,与原系统相频特性曲线交点的横坐标为线,与原系统相频特性曲线交点的横坐标为000001301040180180013044.044.0 c作作 取取dbjGc20)(lg20 0201lg20a3)在原系统伯德图上量得在原系统伯德图上量得,由,由得得a=0.1a=0.1。2)4)08.0176.0)1090(1 00 ccctgaT008.01TT=125滞后校正的传递函数为滞后校正的传递函数为 sssGc12515.121)(验证系统的性能要求。验证系统的性能要求。5)自动控制原理国家精品课程 浙江工业大学自动化研究所39Bode DiagramFrequency (rad/sec)-15
37、0-100-50050100150System:sysFrequency(rad/sec):1.81Magnitude(dB):-0.0693Magnitude(dB)System:untitled1Frequency(rad/sec):0.436Magnitude(dB):0.34610-410-310-210-1100101102-270-180-900System:untitled1Frequency(rad/sec):1.78Phase(deg):-195System:untitled1Frequency(rad/sec):0.433Phase(deg):-135System:Csys
38、Frequency(rad/sec):0.431Phase(deg):-9.52Phase(deg)例例6.2 校正前、后系统的伯德图校正前、后系统的伯德图 自动控制原理国家精品课程 浙江工业大学自动化研究所408788899091929394868788899091X:91.21Y:91.21X:91.21Y:91.01X:89.85Y:89.85X:89.85Y:89.6501020304050607080901000102030405060708090100例例6.2 校正后系统的单位斜坡响应曲线校正后系统的单位斜坡响应曲线 自动控制原理国家精品课程 浙江工业大学自动化研究所41 6.3
39、.3 滞后校正装置滞后校正装置 (1)无源滞后校正网络)无源滞后校正网络 CsRRCsRsCRRsCRsEsMsGc)(1111)()()(2122121212RRRaCRRT)(211,11)(aTsaTssGc为了满足传递函数的推导条件,一般在滞后校正网络后串接为了满足传递函数的推导条件,一般在滞后校正网络后串接一个运算放大器,起隔离作用。一个运算放大器,起隔离作用。自动控制原理国家精品课程 浙江工业大学自动化研究所42 (2)有源滞后校正网络)有源滞后校正网络)1(11)(3132321332CsRRCsRRRRRsCRsCRRsGc1133232132CsRCsRRRRRRR132RR
40、RKcCRT33232RRCRRaT322RRRa11)(TsaTsKsGcc1a 1)滞后校正:采用运算放大器的有源滞后校正网络的一种实现)滞后校正:采用运算放大器的有源滞后校正网络的一种实现 自动控制原理国家精品课程 浙江工业大学自动化研究所43 2)PI控制器:采用运算放大器的有源滞后校正网络的另一种实现控制器:采用运算放大器的有源滞后校正网络的另一种实现)11(1)(21212CsRRRRsCRsGc12RRKcCRT2TsTsKTsKsGccc1)11()(自动控制原理国家精品课程 浙江工业大学自动化研究所446.4 滞后滞后-超前超前校正校正6.4.1 滞后滞后-超前超前校正校正网
41、络网络 6.4.2 用频域法确定用频域法确定滞后滞后-超前超前校正参数校正参数自动控制原理国家精品课程 浙江工业大学自动化研究所45超前校正超前校正:给系统中频段增加理论上不超过给系统中频段增加理论上不超过90,实际上一般不超过,实际上一般不超过65的相角,提高系统的稳定裕度。但降低了抗干扰性能。的相角,提高系统的稳定裕度。但降低了抗干扰性能。滞后校正滞后校正:降低系统的截止频率,提高系统的相角裕度。但降低了降低系统的截止频率,提高系统的相角裕度。但降低了快速性。快速性。问题:问题:原系统需要补偿的相角超过原系统需要补偿的相角超过65,甚至超过,甚至超过90度,用超前校正不能度,用超前校正不能
42、够提供这么大的正相角。够提供这么大的正相角。原系统截止频率不能降得太低,保证快速性。原系统截止频率不能降得太低,保证快速性。怎么解决?怎么解决?采用采用发挥发挥滞后校正降低系统的截止频率,提高系统的相角裕滞后校正降低系统的截止频率,提高系统的相角裕度;用超前校正在截止频率处增加超前相角,进一步提高系统的度;用超前校正在截止频率处增加超前相角,进一步提高系统的相角裕度。相角裕度。自动控制原理国家精品课程 浙江工业大学自动化研究所461122112221211221122121122(1)(1)(1)(1)(1)(1)1()RC sR C sRC sR C sRC sRC sR C sRCR CR
43、C sRC R C s111CRT 222CRT 21221121CRCRCRTT1)1)(1()1)(1()(2121sTsTsTsTsGc6.4.16.4.1212212111211122211111()()()()111()()()11cRRRsCsCsCM sG sRE sRRRsCsCsCsCRsCRsC自动控制原理国家精品课程 浙江工业大学自动化研究所47)1)(1()1)(1()(2121sTsTsTsTsGc自动控制原理国家精品课程 浙江工业大学自动化研究所48Bode DiagramFrequency (rad/sec)10-410-310-210-1100101102103
44、-90-4504590System:sys1Frequency(rad/sec):2.21Phase(deg):54.9Phase(deg)System:sys2Frequency(rad/sec):0.0458Phase(deg):-54.8-20-15-10-505101520System:sys1Frequency(rad/sec):2.21Magnitude(dB):10Magnitude(dB)System:untitled1Frequency(rad/sec):0.0477Magnitude(dB):-10SYS1=(1+1.43s)/(1+0.143s)SYS2=(1+6.67s
45、)/(1+66.7s)SYS1*SYS2 滞后滞后超前校正网络的超前校正网络的Bode图图 自动控制原理国家精品课程 浙江工业大学自动化研究所49Bode DiagramFrequency (rad/sec)-100-80-60-40-20020406080System:sysFrequency(rad/sec):0.0101Magnitude(dB):60System:sysFrequency(rad/sec):0.0986Magnitude(dB):40.1System:sysFrequency(rad/sec):0.993Magnitude(dB):16.1Magnitude(dB)Sy
46、stem:sysFrequency(rad/sec):2.41Magnitude(dB):0.13310-210-1100101102-270-225-180-135-90System:sysFrequency(rad/sec):1.41Phase(deg):-180Phase(deg)System:sysFrequency(rad/sec):2.4Phase(deg):-207 6.4.2 用频域法确定滞后用频域法确定滞后-超前校正参数超前校正参数 例例6.3 设有单位反馈系统具有如下的开环传递函数设有单位反馈系统具有如下的开环传递函数)15.0)(1()(0sssKsG要求:要求:K=10
47、,K=10,050,h=10dB 试确定滞后试确定滞后超前校正参数。超前校正参数。解:解:1)根据稳态性能指标,绘制未校正系统的伯德图)根据稳态性能指标,绘制未校正系统的伯德图 0032 自动控制原理国家精品课程 浙江工业大学自动化研究所502 2)选择校正后的截止频率)选择校正后的截止频率 若性能指标中对系统的快速性未提明确要求时,一般对应若性能指标中对系统的快速性未提明确要求时,一般对应 00180)(jG的频率作为的频率作为 c3)确定校正参数)确定校正参数 由超前部分应产生的超前相角由超前部分应产生的超前相角 而定而定 sin1sin11055sin155sin100 4)确定滞后校正
48、部分的参数)确定滞后校正部分的参数 2T 21011cT一般取一般取 因此滞后部分的传递函数为:因此滞后部分的传递函数为:16.67166.7ss c 1.5c2210.15,6.67TT00050555自动控制原理国家精品课程 浙江工业大学自动化研究所51 5)确定超前部分的参数)确定超前部分的参数 1T)(lg20,(0 ccjGdecdB/20直线,由该直线与直线,由该直线与 0db线交点坐标线交点坐标)/(1T确定确定1T1.4310.1431ss7.011T71011TT 6)将滞后校正部分和超前校正部分的传递函数组合在一起)将滞后校正部分和超前校正部分的传递函数组合在一起,即得滞后
49、即得滞后-超前校正的传递函数为超前校正的传递函数为1212111 1.4316.67()110.143 166.71cTsT sssG sTT ssss 7)绘制校正后的伯德图,检验性能指标)绘制校正后的伯德图,检验性能指标 过点过点做做因此超前部分的传递函数为:因此超前部分的传递函数为:自动控制原理国家精品课程 浙江工业大学自动化研究所52Bode DiagramFrequency (rad/sec)-200-150-100-50050100150System:sysFrequency(rad/sec):1.42Magnitude(dB):10.4System:untitled1Freque
50、ncy(rad/sec):1.43Magnitude(dB):-13System:sysFrequency(rad/sec):0.0101Magnitude(dB):59.9System:sysFrequency(rad/sec):0.000988Magnitude(dB):80.1System:sysFrequency(rad/sec):0.000101Magnitude(dB):99.9System:sysFrequency(rad/sec):0.101Magnitude(dB):39.9Magnitude(dB)10-410-310-210-1100101102103-270-225-1
51、80-135-90-4504590System:sysFrequency(rad/sec):1.42Phase(deg):-180System:untitled1Frequency(rad/sec):2.42Phase(deg):51.5System:untitled1Frequency(rad/sec):0.0414Phase(deg):-51.5Phase(deg)System:untitled2Frequency(rad/sec):0.125Phase(deg):-135校正前、后系统的伯德图校正前、后系统的伯德图自动控制原理国家精品课程 浙江工业大学自动化研究所5310-410-310
52、-210-1100101102103-270-225-180-135-90System:untitled1Frequency(rad/sec):1.04Phase(deg):-123System:untitled1Frequency(rad/sec):0.0485Phase(deg):-145Phase(deg)Bode DiagramFrequency (rad/sec)-150-100-50050100150Magnitude(dB)System:untitled1Frequency(rad/sec):1.04Magnitude(dB):0.523校正后的伯德图校正后的伯德图自动控制原理国
53、家精品课程 浙江工业大学自动化研究所54010020030040050060070000.20.40.60.811.21.4Step ResponseTime(sec)Amplitude校正后系统的单位阶跃响应校正后系统的单位阶跃响应 自动控制原理国家精品课程 浙江工业大学自动化研究所556.5 串联校正的综合法串联校正的综合法6.5.1 综合法的基本方法综合法的基本方法 6.5.2 按最佳二阶系统校正按最佳二阶系统校正6.5.3 按典型三阶系统校正按典型三阶系统校正自动控制原理国家精品课程 浙江工业大学自动化研究所56串联校正综合法,它是根据给定的性能指标求出系统期望的开串联校正综合法,它是
54、根据给定的性能指标求出系统期望的开环频率特性,然后与未校正系统的频率特性进行比较,最后确环频率特性,然后与未校正系统的频率特性进行比较,最后确定系统校正装置的形式及参数。综合法的主要依据是期望特性,定系统校正装置的形式及参数。综合法的主要依据是期望特性,所以又称为期望特性法。所以又称为期望特性法。综合法的基本方法是按照设计任务所要求的性能指标,综合法的基本方法是按照设计任务所要求的性能指标,构造具有期望的控制性能的开环传递函数构造具有期望的控制性能的开环传递函数)(sG然后确定校正装置的传递函数然后确定校正装置的传递函数 sGsGsGc0 0LLLc是满足给定性能指标的期望开环对数幅频特性,通
55、常称为是满足给定性能指标的期望开环对数幅频特性,通常称为“期望特性期望特性”。L 6.5.1 综合法的基本方法综合法的基本方法自动控制原理国家精品课程 浙江工业大学自动化研究所57串联校正综合法的一般步骤如下:串联校正综合法的一般步骤如下:l绘制原系统的对数幅频特性曲线绘制原系统的对数幅频特性曲线 0Ll按要求的设计指标绘制期望特性曲线按要求的设计指标绘制期望特性曲线 Ll求得串联校正环节的对数幅频特性曲线求得串联校正环节的对数幅频特性曲线 l写出相应的传递函数;写出相应的传递函数;l确定具体的校正装置及参数。确定具体的校正装置及参数。从上面步骤可以看出期望特性法的关键是绘制期望特性。从上面步
56、骤可以看出期望特性法的关键是绘制期望特性。自动控制原理国家精品课程 浙江工业大学自动化研究所58在工程上,一般要求系统的期望特性符合下列要求:在工程上,一般要求系统的期望特性符合下列要求:l对数幅频特性的中频段为对数幅频特性的中频段为 decdB20且有一定的宽度,保证系统的稳定性;且有一定的宽度,保证系统的稳定性;l截止频率截止频率c应尽可能大一些,以保证系统的快速性;应尽可能大一些,以保证系统的快速性;l低频段具有较高的增益,以保证稳态精度;低频段具有较高的增益,以保证稳态精度;l高频段应衰减快,以保证抗干扰能力。高频段应衰减快,以保证抗干扰能力。满足上述要求的模型有很多,通常取一些结构较
57、简单的模型。满足上述要求的模型有很多,通常取一些结构较简单的模型。例如二阶、三阶模型等。例如二阶、三阶模型等。自动控制原理国家精品课程 浙江工业大学自动化研究所59 6.5.2 按最佳二阶系统校正按最佳二阶系统校正)2()(2nnsssG110212TTKnnnnTK21210典型二阶系统典型二阶系统 自动控制原理国家精品课程 浙江工业大学自动化研究所60在典型二阶系统中,在典型二阶系统中,707.0%3.4%p05.65这时兼顾了快速性和相对稳定性能,所以,通常把这时兼顾了快速性和相对稳定性能,所以,通常把 707.0的典型二阶系统称为的典型二阶系统称为“最佳二阶系统最佳二阶系统”。对于最佳
58、二阶系统,对于最佳二阶系统,1021TK最佳二阶系统的开环传递函数为最佳二阶系统的开环传递函数为)1(2111sTsTsG(1)被控对象为一阶惯性环节)被控对象为一阶惯性环节 1110sTKsG 取最佳二阶模型为期望模型,其时间常数与被控对象的时间常数相同,取最佳二阶模型为期望模型,其时间常数与被控对象的时间常数相同,sTKsGsGsGc11021一般按最佳二阶模型来设计系统。一般按最佳二阶模型来设计系统。自动控制原理国家精品课程 浙江工业大学自动化研究所61(2)被控对象为两个惯性环节)被控对象为两个惯性环节串联串联 1121210sTsTKKsG12TT 时间常数与被控对象中较小的时间常数
59、相同时间常数与被控对象中较小的时间常数相同 sTTKKTsTKKsTsGsGsGc212121212011221)(可见,应采用可见,应采用PI调节器,调节器参数应整定为调节器,调节器参数应整定为12122TKKTKP2TTI自动控制原理国家精品课程 浙江工业大学自动化研究所62(3)被控对象为三个惯性环节串联)被控对象为三个惯性环节串联31213213210,111)(TTTTsTsTsTKKKsG时间常数与对象的最小的一个时间常数相同时间常数与对象的最小的一个时间常数相同 sTKKKsTsTsGc132132211)(可见,应可见,应采用采用PIDPID调节器调节器,调节器参数应整定为,调
60、节器参数应整定为323232132132,2TTTTTTTTTKKKTTKDIP自动控制原理国家精品课程 浙江工业大学自动化研究所63(4)被控对象由若干小惯性环节组成)被控对象由若干小惯性环节组成 11122110 sTKsTKsTKsGnn这时,可用一个较大惯性的惯性环节来近似,即令这时,可用一个较大惯性的惯性环节来近似,即令 10TsKsGnnKKKKTTTT 2121;KTssGsGsGc210(5)被控对象含有积分环节)被控对象含有积分环节 1110sTsKsG 1121TKsGc自动控制原理国家精品课程 浙江工业大学自动化研究所646.5.3 按典型三阶系统校正按典型三阶系统校正1
61、.具有最佳频比的典型三阶模型具有最佳频比的典型三阶模型 2112TTh为中频宽度。由于中频段对系统的动态性能为中频宽度。由于中频段对系统的动态性能起决定性作用,所以,起决定性作用,所以,h是一个重要参数。是一个重要参数。具有具有“最佳频比最佳频比”的典型三阶模的典型三阶模型型122hhc211hc具有最佳频比的典型三阶模型为具有最佳频比的典型三阶模型为 1121222222sTsshTThhsG考虑到参考输入和扰动输入两方面的性能指标,通常取中频宽度考虑到参考输入和扰动输入两方面的性能指标,通常取中频宽度5h 自动控制原理国家精品课程 浙江工业大学自动化研究所651)被控对象为)被控对象为 1
62、220sTsKsG shThTKhsGsGsGc22201121应采用应采用PI调节器,其参数整定为调节器,其参数整定为222;21hTTThKhKIp2)当被控对象为)当被控对象为 32322011TTsTsTsKsG sThTThTsThTKThThThsGsGsGc32323222223201121 应应采用采用PIDPID调节器调节器,其参数整定为,其参数整定为3232,32222232,21ThTThTTThTTKThThThKDIP自动控制原理国家精品课程 浙江工业大学自动化研究所662.具有最大相角裕度的典型三阶模型具有最大相角裕度的典型三阶模型 典型三阶模型的相角裕度为典型三阶模型的相角裕度为2-11-1tgtgTTcc0Kc调整调整,即改变,即改变使使取得最大值取得最大值 22121011ThTThh21tg1-maxhhThhK22221001具有最大相角裕度的典型三阶模型为具有最大相角裕度的典型三阶模型为 1122222sTsThhshTsG自动控制原理国家精品课程 浙江工业大学自动化研究所676.6 Simulink在控制系统仿真中的应用在控制系统仿真中的应用
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
