 超声波测距仪毕业设计论文
超声波测距仪毕业设计论文

《超声波测距仪毕业设计论文》由会员分享,可在线阅读,更多相关《超声波测距仪毕业设计论文(30页珍藏版)》请在装配图网上搜索。
1、第一章绪论1.1 课题设计目的及意义1.1.1 设计的目的随着科学技术的快速发展,超声波将在测距仪中的应用越来越广。但就目 前技术水平来说,人们可以具体利用的测距技术还十分有限,因此,这是一个正在 蓬勃发展而又有无限前景的技术及产业领域。展望未来,超声波测距仪作为一种新 型的非常重要有用的工具在各方面都将有很大的发展空间,它将朝着更加高定位高 精度的方向发展,以满足日益发展的社会需求,如声纳的发展趋势基本为:研制具 有更高定位精度的被动测距声纳,以满足水中武器实施全隐蔽攻击的需要;继续发 展采用低频线谱检测的潜艇拖曳线列阵声纳,实现超远程的被动探测和识别;研制 更适合于浅海工作的潜艇声纳,特别
2、是解决浅海水中目标识别问题;大力降低潜艇 自噪声,改善潜艇声纳的工作环境。无庸置疑,未来的超声波测距仪将与自动化智 能化接轨,与其他的测距仪集成和融合,形成多测距仪。随着测距仪的技术进步, 测距仪将从具有单纯判断功能发展到具有学习功能,最终发展到具有创造力。在新 的世纪里,面貌一新的测距仪将发挥更大的作用。1.1.2 设计的意义超声波测距系统主要应用于汽车的倒车雷达、机器人自动避障行走、建筑施工 工地以及一些工业现场例如:液位、井深、管道长度等场合。因此研究超声波测距 系统的原理有着很大的现实意义。对本课题的研究与设计,还能进一步提高自己的 电路设计水平,深入对单片机的理解和应用。1.2 超声
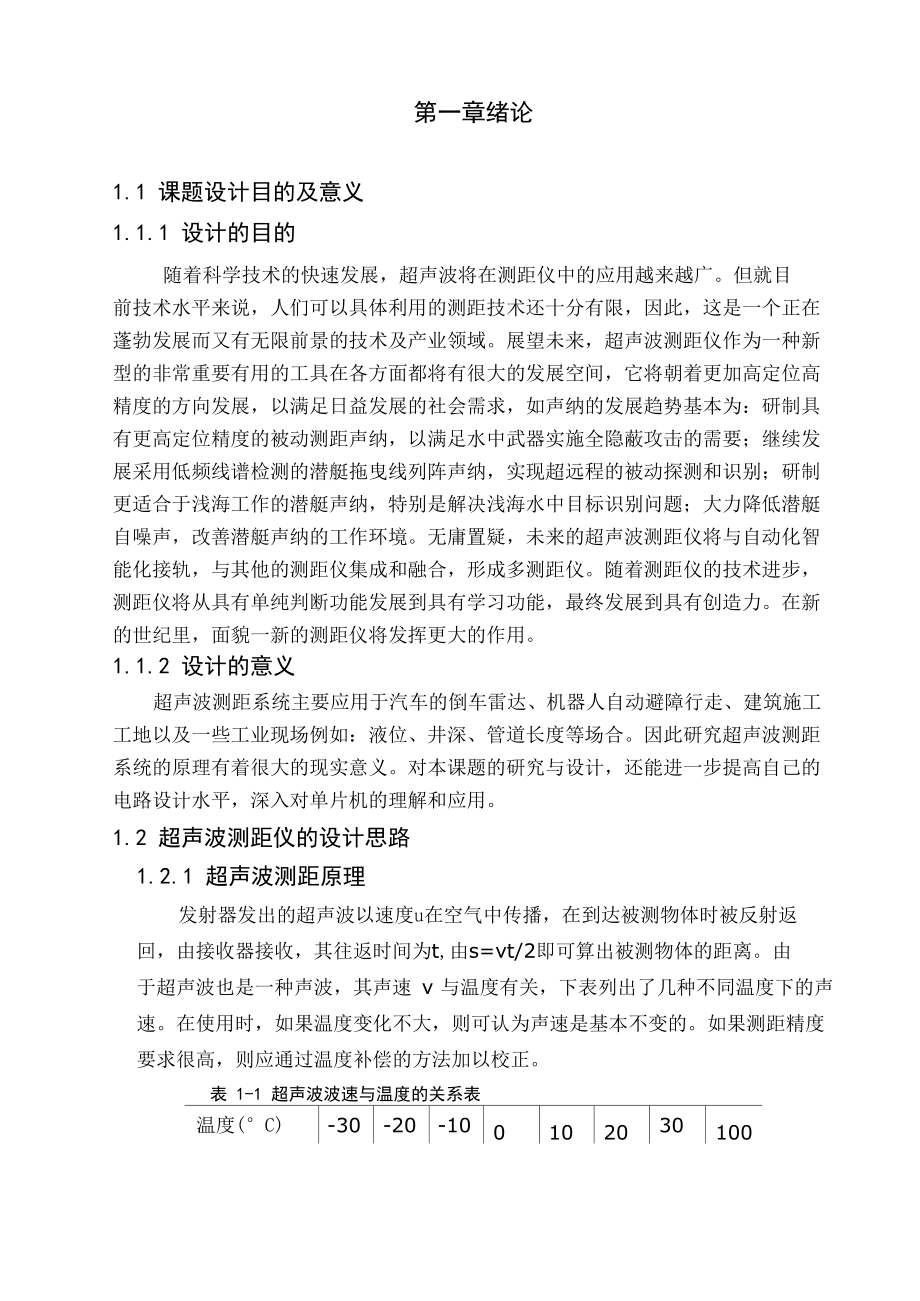
3、波测距仪的设计思路1.2.1 超声波测距原理发射器发出的超声波以速度u在空气中传播,在到达被测物体时被反射返 回,由接收器接收,其往返时间为t,由s=vt/2即可算出被测物体的距离。由 于超声波也是一种声波,其声速 v 与温度有关,下表列出了几种不同温度下的声 速。在使用时,如果温度变化不大,则可认为声速是基本不变的。如果测距精度 要求很高,则应通过温度补偿的方法加以校正。表 1-1 超声波波速与温度的关系表温度(C)-30-20-100102030100声速(m / s)3133193253233383443493861.2.2 超声波测距仪原理框图如下图单片机发出40kHZ的信号,经放大后
4、通过超声波发射器输出;超声波接收器将 接收到的超声波信号经放大器放大,进行检波处理后,启动单片机中断程序,测得 时间为t,再由软件进行判别、计算,得出距离数并送LED显示。图 1-1 超声波测距仪原理框图1.3 课题设计的任务和要求设计一超声波测距仪,任务:(1) .了解超声波测距原理。(2) .根据超声波测距原理,设计超声波测距器的硬件结构电路。 设计一超声波测距仪,要求:(1) .设计出超声波测距仪的硬件结构电路。(2) .对设计的电路进行分析能够产生超声波,实现超声波的发送与接收,从而 实现利用超声波方法测量物体间的距离。(3) .对设计的电路进行分析。(4) .以数字的形式显示测量距离
5、。第二章课程的方案设计与论证2.1 系统整体方案的设计由于超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声 波经常用于距离的测量。利用超声波检测距离,设计比较方便,计算处理也较简单, 并且在测量精度方面也能达到农业生产等自动化的使用要求。超声波发生器可以分为两大类:一类是用电气方式产生超声波,一类是用机械 方式产生超声波。电气方式包括压电型、电动型等;机械方式有加尔统笛、液哨和 气流旋笛等。它们所产生的超声波的频率、功率、和声波特性各不相同,因而用途 也各不相同。目前在近距离测量方面常用的是压电式超声波换能器。根据设计要求 并综合各方面因素,本文采用AT89C51单片机作为控制器
6、,用动态扫描法实现LED 数字显示,驱动信号用单片机的定时器。2.2 系统整体方案的论证超声波测距的原理是利用超声波的发射和接收,根据超声波传播的时间来计 算出传播距离。实用的测距方法有两种,一种是在被测距离的两端,一端发射,另 一端接收,直接接收波方式,适用于身高计;一种是发射波被物体反射回来后接收 的反射波方式,适用于测距仪。此次设计采用反射波方式。测距仪的分辨率取决于对超声波传感器的选择。超声波传感器是一种采用压 电效应的传感器,常用的材料是压电陶瓷。由于超声波在空气中传播时会有相当的 衰减,衰减的程度与频率的高低成正比;而频率高分辨率也高,故短距离测量时应 选择频率高的传感器,而长距离
7、的测量时应用低频率的传感器。第三章 系统的硬件结构设计硬件电路的设计主要包括单片机系统及显示电路、超声波发射电路和超声 波检测接收电路三部分。单片机采用AT89C51或其兼容系列。采用12MHz高精度 的晶振,以获得较稳定时钟频率,减小测量误差。单片机用 P1.0 端口输出超声波换 能器所需的40kHz的方波信号,利用外中断0 口监测超声波接收电路输出的返回信 号。显示电路采用简单实用的4位共阳LED数码管,段码用74LS244驱动,位码 用 PNP 三极管 8550 驱动。3.1 51系列单片机的功能特点及测距原理3.1.1 51系列单片机的功能特点5l系列单片机中典型芯片(AT89C51)
8、采用40引脚双列直插封装(DIP)形式, 内部由CPU,4kB的ROM, 256 B的RAM, 2个16b的定时/计数器TO和T1, 4个8 b 的工/O端I: IPO, P1,P2, P3, 个全双功串行通信口等组成。特别是该系列单 片机片内的Flash可编程、可擦除只读存储器(EPROM),使其在实际中有着十分广 泛的用途,在便携式、省电及特殊信息保存的仪器和系统中更为有用。该系列单片 机引脚与封装如图3-1所示。RSTAVPDRXDPi#DEFINE K1 P3 4#DEFINE CSBOUT P3_5超声波发送#DEFINE CSBINT P3_7超声波接收#DEFINE CSBC=0
9、.034#DEFINE BG P3_3UNSIGNED CHAR CSBDS,OPTO,DIGIT,BUFFER3,XM1,XM2,XMO,KEY,JPJS;显示标识UNSIGNED CHARCONVERT10=0X3F,0X06,0X5B,0X4F,0X66,0X6D,0X7D,0X07,0X7F,0X6F;/09段码UNSIGNED INT S,T,I, XX,J,SJ1,SJ2,SJ3,MQS,SX1;BIT CL;VOID CSBCJ();VOID DELAY(J);延时函数VOID SCANLED();显示函数VOID TIMETOBUFFER();VOID KEYSCAN();显示
10、转换函数VOID K1CL();VOID K2CL();VOID K3CL();VOID K4CL();VOID OFFMSD();VOID MAIN()主函数EA=1;开中断TMOD=OX11;设定时器0为计数,设定时器1定时ET0=1;定时器0中断允许ET1=1;定时器1中断允许TH0=0X00;TL0=0X00;TH1=0X9E;TL1=0X57;CSBDS=0;CSBINT=1;CSBOUT=1;CL=0;PTO=OXFF;JPJS=0;SJ1=45;SJ2=200;SJ3=400;K4CL();TR1=1;WHILE(1)KEYSCAN();IF(JPJSSJ3)BUFFER2=0X
11、76;BUFFERl=0X76;BUFFER0=0X76;ELSE IF(SSJ1)BUFFER2=0X40;BUFFER1=0X40;BUFFER0=0X40;ELSE TIMETOBUFFER();ELSE TIMETOBUFFER();将值转换成 LED 段码OFFMSD();SCANLED();显示函数IF(SSJ2)BG=0;BG=1;VOID SCANLED()显示功能模块DIGIT=0X04;FOR( I=0; I=1;循环右移1位VOID TIMETOBUFFER()转换段码功能模块XM0=S/100;XM1=(S-100*XM0)/10;XM2=S-100*XM0-10*XM
12、1;BUFFER2=CONVERTXM2;BUFFER1=CONVERTXM1;BUFFER0=CONVERTXM0;VOID DELAY(I)WHILE(-I);VOID TIMER1INT (VOID) INTERRUPT 3 USING 2TH1=0X9E;TL1=0X57;CSBDS+;IF(CSBDS=40)CSBDS=O;CL=1;VOID CSBCJ()IF(CL=1)TR1=0;TH0=0X00;TL0=0X00;I=10;WHILE(I-)CSBOUT=!CSBOUT;TR0=1;I=MQS;盲区WHILE(I-)1=0;WHILE(CSBINT)I+;IF(I=2450)上
13、限值CSBINT=O;TR0=0;TH1=OX9E;TL1=OX57;T=TH0;T=T*256+TL0;S=T*CSBC/2;TR1=1;CL=0;VOID KEYSCAN() XX=0;IF(K1!=1)DELAY(400);IF(K1!=1)WHILE(!K1)DELAY(30);XX+;IF(XX2000)健盘处理函数/判断开关是否按下延时去抖动/判断开关是否按下JPJS+;IF(JPJS4)JPJS=O;xx=o;SWITCH(JPJS)CASE 1: K1CL();BREAK;CASE 2: K2CL();BREAK;CASE 3: K3CL();BREAK;CASE 4: K4C
14、L();BREAK;VOID K1CL()SJ1=SJ1+5;IF(SJ1100)SJ1=30;S=SJ1;VOID K2CL()SJ2=SJ2+5;IF(SJ2500)SJ2=40;S=SJ2;VOID K3CL()SJ3=SJ3+1O;IF(SJ35OO)SJ3=100;S=SJ3;VOID K4CL()SX1=SJ1-1;SX1=SX1/CSBC;MQS=SX1/4.5;VOID OFFMSD()IF (BUFFER0 = 0X3F) BUFFER0 = 0X00;致谢首先,我要感谢我的指导老师郭泉江老师在毕业设计中对我给予的悉心指导和 严格要求,同时也感谢本校的一些老师在毕业设计期间所
15、给予我得帮助。在我毕业 论文写作期间,各位老师给我提供了种种专业知识上的指导和日常生活上的关怀, 没有您们这样的帮助和关怀,我不会这么顺利的完成毕业设计,借此机会,向您们 表示由衷的感激。同时还要感谢系实验室在毕业设计期间提供给我们优越的实验条 件。接着,我要感谢和我一起做毕业设计的同学。在毕业设计的短短3 个月里,你 们给我提出很多宝贵的意见,给了我不少帮助还有工作上的支持,在此也真诚的谢 谢你们。同时,我还要感谢我的寝室同学和身边的朋友,正是在这样一个团结友爱, 相互促进的环境中,在和他们的相互帮助和启发中,才有我今天的小小收获。最后我要深深地感谢我的家人,正是他们含辛茹苦地把我养育成人,在生活和 学习上给予我无尽的爱、理解和支持,才使我时刻充满信心和勇气,克服成长路上 的种种困难,顺利的完成大学学习。还有许许多多给予我学业上鼓励和帮助的朋友,在此无法一一列举,在此也一 并表示忠心地感谢!
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
