 四旋翼直升机姿态控制设计
四旋翼直升机姿态控制设计

《四旋翼直升机姿态控制设计》由会员分享,可在线阅读,更多相关《四旋翼直升机姿态控制设计(21页珍藏版)》请在装配图网上搜索。
1、四旋翼直升机姿态控制设计一、课程设计目的1) .熟练掌握运用所学的飞行控制系统的基础知识,深入理解前期所学的专业基础课的原理2) .具备独立查阅中英文资料和相应的工程设计手册能力。3) .能够掌握典型的飞行器的飞行控制系统的设计过程,包括方案的选择,姿态控制系统 包括电机伺服系统等方案的设计,误差分析等。4) .具备熟练使用 matlab 语言的技能。5) .能够对所设计的系统进行计算机仿真实验,并就仿真结果进行分析研究。6) .对造成的系统误差的因素进行分析,改进系统设计。二、四旋翼直升机的基本工作原理在无人直升机中,四旋翼直升机凭借其独特的的外形和结构成为国内外机构研究的热点。与 常规的布
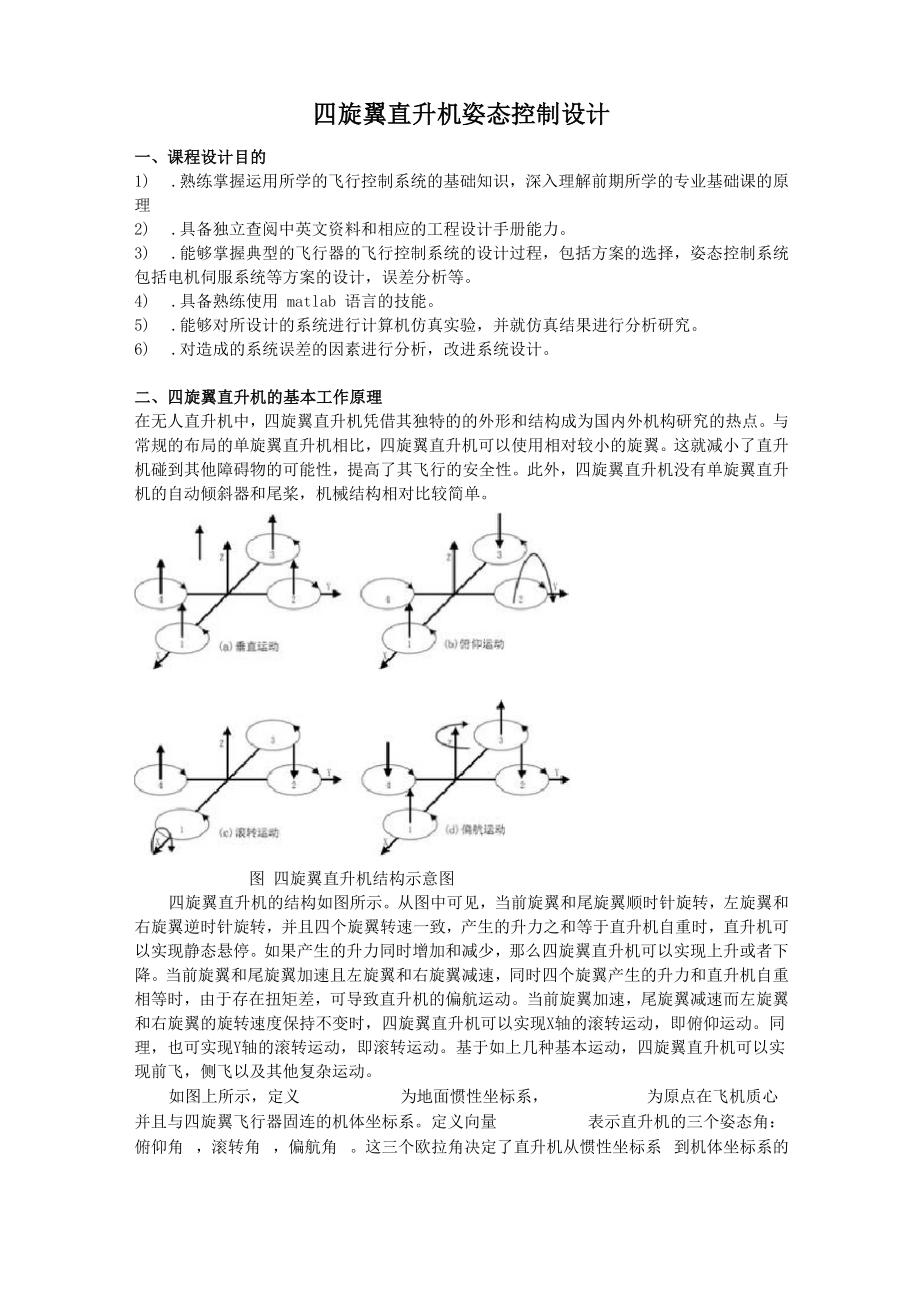
2、局的单旋翼直升机相比,四旋翼直升机可以使用相对较小的旋翼。这就减小了直升 机碰到其他障碍物的可能性,提高了其飞行的安全性。此外,四旋翼直升机没有单旋翼直升 机的自动倾斜器和尾桨,机械结构相对比较简单。图 四旋翼直升机结构示意图四旋翼直升机的结构如图所示。从图中可见,当前旋翼和尾旋翼顺时针旋转,左旋翼和 右旋翼逆时针旋转,并且四个旋翼转速一致,产生的升力之和等于直升机自重时,直升机可 以实现静态悬停。如果产生的升力同时增加和减少,那么四旋翼直升机可以实现上升或者下 降。当前旋翼和尾旋翼加速且左旋翼和右旋翼减速,同时四个旋翼产生的升力和直升机自重 相等时,由于存在扭矩差,可导致直升机的偏航运动。当
3、前旋翼加速,尾旋翼减速而左旋翼 和右旋翼的旋转速度保持不变时,四旋翼直升机可以实现X轴的滚转运动,即俯仰运动。同 理,也可实现Y轴的滚转运动,即滚转运动。基于如上几种基本运动,四旋翼直升机可以实 现前飞,侧飞以及其他复杂运动。如图上所示,定义为地面惯性坐标系,为原点在飞机质心并且与四旋翼飞行器固连的机体坐标系。定义向量表示直升机的三个姿态角:俯仰角 ,滚转角 ,偏航角 。这三个欧拉角决定了直升机从惯性坐标系 到机体坐标系的 转换矩阵。通过欧拉拉格朗日的方法可以得到四旋翼直升机的非线性姿态运动方程如下:为力矩系数, 为科氏项,(包 为机体受到的力矩。 可以通过以下公式得其中 为阻尼系数, 括陀螺
4、回转效应和离心效应项) 到:其中, 为电机到飞机质心的距离, 为力到力矩的比例系数, 分别为 前旋翼,左旋翼,尾旋翼,右旋翼产生的升力。 的具体表达式如下: 如: , ; 其中 为一个正常数, 分别为四个螺旋桨旋转时的角速度。三、飞行器姿态控制控制系统 姿态控制系统的主要功能是根据给定的参考姿态角,对飞行器的旋转运动进行控制,使 飞行器姿态角跟踪参考信号。主要的姿态控制方法有比例积分微分控制,多回路控制等。1.比例积分微分控制比例积分微分控制(proportional-derivative control, PID控制)是目前飞行器姿态 控制系统设计时常采用的一种控制方法。通过对姿态角,姿态角
5、速度和姿态角积分进行反馈 实现整个闭环控制系统的稳定。对于给定的俯仰角,滚转角和偏航角参考信号(),设计控制输入如下:如: ;其中,分别为比例,积分,微分控制增益。2.多回路控制 对于姿态角和姿态角速度分别设计控制器,构成姿态角闭环控制回路和姿态角速度闭环 控制回路。首先,设计姿态角速度的参考信号由姿态角控制器给出:如: ;其中, 为姿态角控制器增益。 然后,设计姿态角速度控制器使角速度 分别跟踪 如下:其中, 为姿态角速度控制器增益。拉格朗日-欧拉旋转方程关于 ,通常给定一下方程:这里:M()并且:C( )=其中: 0;( )( )+( C )-因此,有上述数学模型推知,四旋翼直升机旋转运动
6、的拉格朗日-欧拉方程式可得到: 这里,T表示四旋翼飞行器上四个旋翼产生的所有推力,且在无空气阻力的情况下,而T=mg;这里,b与空气密度成正比,也与桨片的形状,桨片的数量,桨片的长度,桨片翼 型的俯仰角和阻力常数有关。如果从旋翼到机体重心表示为l有四个旋翼产生的力矩如下:为了提供真正控制输入的计算式,将T和 合并成为一个矩阵,如下:四、实验设计步骤1. 学习四旋翼直升机的基本原理;2. 根据所掌握的知识选择一种姿态控制方法;在本次四旋翼飞行器的姿态控制中,选用了多回路控制飞行器姿态的控制器,构成了角速度 闭环控制回路。对于姿态角和姿态角速度分别设计控制器,构成姿态角闭环控制回路和姿态角速度闭环
7、控制 回路。首先,设计姿态角速度的参考信号由姿态角控制器给出:如:;其中,为姿态角控制器增益。然后,设计姿态角速度控制器使角速度 分别跟踪如下:其中,为姿态角速度控制器增益。SJQDRpfai pfaico dPfai/dtK2 Integrator3.画出姿态控制系统的工作流程图;见 matlab/slx 文件 为了验证本文提出的算法的有效性和效率,在某种特定条件下典型的轨道跟踪中的数据被运 用到 MATLAB/Simulink 仿真中,仿真数据如下: 如图表:无人四旋翼直升机的设计参数如下parametermgLbkValue0.4689.810.2253.3574.8564.8568.8
8、012.984.856unitsKgm/MKgKgKgKgN*Nm*4. 选择参考信号为0 度,利用所设计的姿态控制律进行仿真控制(1) 角度:-0.0401 2 3 4 5 6 7 8 9 10时间 (seconds)02101230 0 0 0 00 0 0 0 0 atad分析:角在t=0时刻,角度约为0.053rad,即3.0382;角在t=0时刻,角度约为0.035rad,即2.0046;角在t=0时刻,角度约为-0.035rad,即-2.0046;经观察,当在t=9.1s的时刻,三个角度趋于稳定,接近0度。(2)角速度:s宀序atad-20 12 3 4 5 6 7 8 9 10时
9、间 (seconds)分析:姿态角速度,基本在 t=1.7s 趋于稳定。(3)角加速度:atad00000086420-80001 2 3 4 5 6 7 8 9 10时间 (seconds)分析:由加速度的动态变化图分析,三个姿态角的加速度几乎迅速趋于0,稳定性极好。5. 选择俯仰角,横滚角和偏航角的参考信号为幅度20 度的阶跃信号,利用设计的姿态控制 率进行仿真跟踪。如下:(1)角度:0.6-叫时序图:0246810时间 (seconds)54320000atad分析:角在t=0时刻,角度约为0.05rad,即28.6624;角在t=0时刻,角度约为0.06rad,即34.3949;角在t
10、=0时刻,角度约为-0.05rad,即-28.6624;经观察,当在t=8.2s的时刻,三个角度趋于稳定,接近0.3rad,且变化同步。与0阶跃的连 续信号相比,趋于稳定的时间变短,但峰值变化相比较大。(2)角速度:时序图:0210时间 (seconds)分析:经观察,当在t=1.7s的时刻,三个角度趋于稳定,接近0度。可以看出,趋于稳定 的速度与参考信号为0幅值的信号相比,几乎一样。但是在初始阶段会出现突变峰值。(3)角加速度:分析:由加速度的时序图得知:三个姿态角在大约0.5s的时刻,会出现一个峰值,这是极 不稳定的情况,要尽量避免此类峰值。6. 选择俯仰角,横滚角和偏航角的参考信号为幅度
11、20度的正弦参考信号,利用设计的姿态 控制率进行仿真跟踪。情况如下:(1)角度:-0.801 2 3 4 5 6 7 8 9 10时间 (seconds)分析:输入参考信号为幅度20的正弦信号,由角度信号知,大约在 t=3.2s 时刻,输出角度跟踪上了输入参考信号。但是相位角不同步。2)角速度:s:atad-201 2 3 4 5 6 7 8 9 10时间 (seconds)分析:由角速度的时序图分析可知,在接近0的时刻,三个姿态角均出现幅值大幅度变化 的情况。但是只在 t=0 一瞬间,可以忽略。随后,在 t=1.2s 左右,达到稳定,但是相位不同 步。(3)角加速度:000000000000
12、0208642atad-60001 2 3 4 5 6 7 8 9 10时间 (seconds)分析:由角加速度的时序图得知,在t=Os的瞬间,存在一个幅度较大的脉冲信号,之后很 快趋于 0.6.根据系统输出的每个时刻飞行器的角度,角速度,角度跟踪误差,控制输入绘制二维曲线图。(1)飞行器角度选择的信号为幅值为0.700rad的正弦信号,频率为pi/2湘角为pi/3.得到的时序图如图所 示:atad-1.5 0 1 2 3 4 5 6 7 8 9 10时间 (seconds)选择的信号为幅值为0.347rad的正弦信号,频率为pi/2,相角为0.得到的时序图如图所示:0000000atad12
13、345678910时间 (seconds)-0.803选择幅值为 20的阶跃信号,得到的时序图如图所示:0.60.5432100000atadfaithetpfaT-0.101 2 3 4 5 6 7 8 9 10时间 (seconds)分析:通过比较12,得出,在增大幅值,改变相角后,对飞行角度的影响没有质上的差距, 仅仅是相应的幅值增大,相角改变。通过比较23得出,姿态角趋于稳定的时间不同,对 比知,幅值为20度的阶跃信号趋于稳定的速度比正弦信号慢。(2) 飞行器的角速度选择的信号为幅值为0.7rad的正弦信号,频率为pi/2,相角为pi/3.得到的时序图如图所示:-2 0 1 2 3 4
14、 5 6 7 8 9 10时间 (seconds)6543210atad选择的信号为幅值为0.347rad的正弦信号,频率为pi/2,相角为0.得到的时序图如图所示:4atad-20 12 3 4 5 6 7 8 9 10时间 (seconds)3选择幅值为 20的阶跃信号,得到的时序图如图所示:4atadpfai-2 0 1 2 3 4 5 6 7 8 9 10时间 (seconds)分析:通过比较12,知参考信号的幅值和相位改变之后,角速度仅仅是相应相位和幅值上产生变化,在其他量上没有发生变化。通过比较23,得出,阶跃信号会出现不稳定的 突变峰值,这对飞行器的控制可能会产生一定影响。(3)
15、控制输入:选择的参考信号为幅值为0.7rad的正弦信号,频率为pi/2,相角为pi/3.得到的时序图如图 所示:16001I1时序图11110000006 4 200 1 2 3 4 5 6 7 8 9 10时间 (seconds)选择的信号为幅值为0.347rad的正弦信号,频率为pi/2,相角为0.得到的时序图如图所示:atad0000503310005000023456时间 (seconds)7 8 9 103 选择幅值为 20的阶跃信号,得到的时序图如图所示:s宀030atad15001000500001 2 3 4 5 6 7 8 9 10时间 (seconds)分析:由12可以得出
16、,w1,w3在趋于稳定时均有周期性的波动,并且随着参考信号幅值 的减小波动相应的减小。w2,w4则稳定性良好,没有波动,且w1,w2波动的周期一致,另 外, w1,w3,w4的幅值在一个水平线上波动,而w2始终在0值附近波动。(4) 角度跟踪误差:选择的信号为幅值为0.7rad的正弦信号,频率为pi/2,相角为pi/3.得到的时序图如图所示:12345678910atad86440602020-0.80时间 (seconds)选择的信号为幅值为0.347rad的正弦信号,频率为pi/2,相角为0.得到的时序图如图所示:3选择幅值为 20的阶跃信号,得到的时序图如图所示:分析:姿态角跟踪,即an
17、gle(有动力学结构控制的三个姿态角)-R(参考信号的三个姿态角),由时 序图12知,均在经过大约3s时,姿态跟踪趋于正常。通过123比较知,姿态角的跟踪实 现同步的时间几乎均为3s。但是对于参考信号为20度的阶跃信号,在初始阶段,有峰值出 现,正弦信号相对峰值较小。因此,综上所述,在运用多回路方法控制飞行器的三个姿态角时,在初始阶段,容易出现突 变峰值,但是,综合比较,选用参考信号为正弦信号产生的尖峰更小相比于阶跃信号。因此, 为了避免此类峰值出现,最好选用正弦信号;另外,三个姿态角在角度,角速度的变化情况 上,基本上与参考信号变化成正比。六.课题研究的科学意义和应用前景 设计四旋翼飞行器,
18、主要解决飞行控制问题,这也是四旋翼无人直升机研制的的关键, 经研究,主要有三个方面的困难。首先,对其进行精准的建模非常的困难。飞行过程中,它 不但同时受到多种物理效应的作用,比如:空气动力,重力和陀螺效应等,还很容易受到气 流等外部环境的干扰。因此,很难获得准确的气动性能参数,难以建立有效,准确的动力学 模型。其次,微小型四旋翼无人直升机是一个具有六个自由度,而只有四个控制输入的欠驱 动系统(underratuated sysrem).它具有多变量,非线性,强耦合和干扰敏感的特性,使得 飞行器系统的设计变得非常困难。再次,利用惯性测量单元信息,通过状态估计方法获得必 要的状态反馈是实现自主飞行
19、控制的一大工程难点。这三个问题能否解决,是实现微小型四 旋翼无人直升机飞行控制的关键,具有非常重要的研究价值。微小型四旋翼无人直升机具备VTOL飞行器的特点,具备广阔的应用前景。军事上可用于情 报获取,地面战场侦查和监视,近距离空中支持和禁飞巡逻,电子战,通信中继等方面。在 民用方面,可分为;在重大火灾之后的搜索与救援,巡逻监视和目标跟踪,缉毒和反走私, 高压线和大桥,水坝,地震后路段的检查,船舶和成图等。 总之,微小型四旋翼直升机飞行器控制技术的研究,从和理论和工程的角度都具有重要意义。 七.总结通过这门课程设计,让我们学会了根据设计要求开展设计工作,能联系实际深入掌握关 于飞行器控制设计专
20、业的理论专业知识,培养了我们综合运用所学专业基础课程的知识分析 和独立解决实际问题的能力。通过专业课程设计是我们掌握了旋翼飞行器的控制系统的设计 步骤,包括查阅资料,系统实验方案的设计,系统模型的建立以及控制器的设计等,并可以 对所学设计的系统方案进行仿真验证以及学会分析系统性能,进而牢固掌握所学的基础知识。参考文献:1 An integral predictive/nonlinear H control structure for a quadrotor helicopter,G.V.Raffo, M.G. Ortega,F.R.Rubio,Automatica,vol.46,no.1,pp
21、.29-39,Jan.2010.2 Hao liu,tongqiang Bai:Brief Paper Robust attitude control of uncertain quadrotors.20133 Peng,K,Cai,G,Chen,B,Dong,M,Lun:Design and implementation of an autonomous flight control law for a UAV helicopter ,Automatica,2009,45,(10),pp.2333-2338.4 Liu,H,Lu,G,Zhong,Y:Robust LQR attitude c
22、ontrol of a 3-DOF lab helicopiter for aggressive maneuvers,IEEE Trans.Ind Electron, 2013,60,(10),pp.4627-4636.5 FARREL J,SHARMA M,POLYCARPOU M:Backstepping-based flight control with adaptive function approximation,J Guid. Control Dyn.,2005,28,(6),pp.1089-1102.n胡宇群微型飞行器的若干动力学问题研究D,南京航空航天大学,2002杨超,宋寿峰
23、对直升机动力学的现状与发展分析J.北京航空航天大学学报,4,1995王适存等直升机空气动力学M 南京航空航天大学,1976邓星钟,周祖德,邓坚,机电传动控制M.华中理工大学,199810孙世贤,理论力学教程M.国防科技大学,1997.11李兹刚,万德钧,捷联式惯性导航技术M.中国船舶信息中心,200112周祥龙,赵景波,欠驱动非线性控制方法综述J,工业仪表和自动化装置,2004年第五 期.13胡春华纵列式无人直升机建模及非线性控制D清华大学,2004.14吴剑,蝶形无人直升机总体设计技术研究D.南京航空航天大学,2004.15苏位峰,异步电机自抗扰矢量控制调速系统D.清华大学,2004.16韩
24、京清.非线性误差反馈控制率一NLSEFJ.控制与决策,5,2005.17王帅;魏国;卡尔曼滤波在四旋翼飞行器姿态测量中的应用J;兵工自动化;2011年01期18岳基隆;张庆杰;朱华勇;微小型四旋翼无人机研究进展及关键技术浅析J;电光与控 制;2010 年 10 期19詹镭;贺人庆;谢阳;龙妍;基于微型四旋翼无人机的智能导航系统J;电子测量技术;2011 年 06 期20李秀英;刘彦博;基于PWM的四旋翼飞行器控制方法J;吉林大学学报(信息科学版);2011 年 05 期21梁延德;程敏;何福本;李航;基于互补滤波器的四旋翼飞行器姿态解算J;传感器与微系 统;2011 年 11 期22李俊;李运
25、堂;四旋翼飞行器的动力学建模及PID控制J;辽宁工程技术大学学报(自然科 学版);2012 年 01 期23庞庆霈;李家文;黄文浩;四旋翼飞行器设计与平稳控制仿真研究J;电光与控制;2012年03 期24甄红涛济晓慧;夏明旗;赵红瑞;四旋翼无人直升机飞行控制技术综述J;飞行力学;2012 年 04 期25刘志军;吕强;王东来;小型四旋翼直升机的建模与仿真控制J;计算机仿真;2010年07期26刘羽峰;宁媛;六轴旋翼碟形飞行器控制系统软件设计及仿真研究J;计算机测量与控 制;2011 年 05 期18郑伟光;四旋翼无人机飞行姿态控制系统研究D;长春理工大学;2010年19李航;小型四旋翼飞行器实
26、时控制系统研究D;大连理工大学;2010年20刘高同;基于FPGA的无人直升机协控制器的设计与开发D;天津大学;2010年21于琰平;基于FlightGear的四旋翼无人机三维可视仿真系统研究D;天津大学;2010年22周权;四旋翼飞行平台飞行控制和惯性导航研究D;南京航空航天大学;2009年23王威;基于DSP的无人机飞控计算机的设计与实现D;南京航空航天大学;2009年24周文霞;基于ARM的某型无人机飞控计算机开发平台的研究D;南京航空航天大学;2009 年25黄牧;基于反步法的微型四旋翼无人飞行器非线性自适应控制研究D;天津大学;2009年26彭贞慧;小型四旋翼无人直升机控制系统设计D;南京理工大学;2010年27张祥;小型飞机起落架电动转变控制系统研究D;中南大学;2010年28王俊生;马宏绪;蔡文澜;税海涛;聂博文;基于 ADRC 的小型四旋翼无人直升机控制方法研 究J;弹箭与制导学报;2008年03期29于雅莉;孙枫;王元昔;基于多传感器的四旋翼飞行器硬件电路设计J;传感器与微系统;2011 年 08 期30杨庆华;宋召青;时磊;四旋翼飞行器建模、控制与仿真J;海军航空工程学院学报;2009年 05 期
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 新人版英语八年级下册Unit5总复习ppt课件
- 新人教部编版一年级语文上第五单元ppt课件(全套)
- 高鸿业经济学基础第十五章-总需求-总供给模型-授课-河北工大宋建林课件
- 新人教版高中数学《等差数列前n项和》课件
- 新人教部编版五年级语文上册第六单元测试卷课件
- 高鸿业微观经济学课件第4章生产论
- 高鸿业--微观经济学-第一章课件
- 新人教版部编本五年级下册语文13 人物描写一组 ppt课件
- 新人教版高中化学必修第一册——电解质的电离ppt课件
- 新人教版部编教材二年级下册第一单元3《贝的故事》优质课教学ppt课件
- 高风险作业培训讲义_002
- 新人教版语文三年级下册第五单元全套ppt课件部编版
- 新人教版英语八年级上册第二单元全部ppt课件
- 《走一步再走一步》重点课件
- 新人教版语文一年级上册:识字1《天地人》课件
