 主轴伺服调试说明
主轴伺服调试说明

《主轴伺服调试说明》由会员分享,可在线阅读,更多相关《主轴伺服调试说明(8页珍藏版)》请在装配图网上搜索。
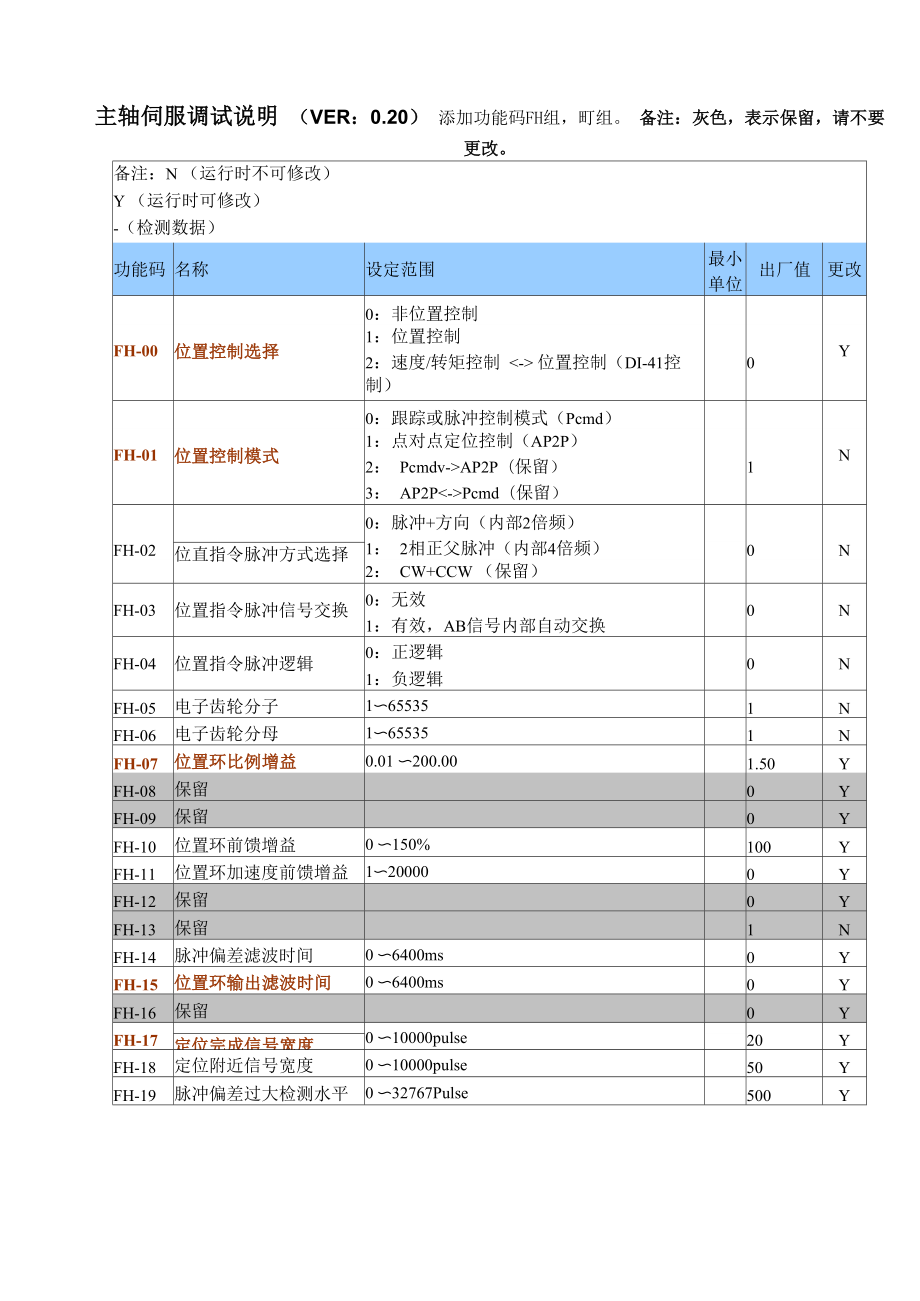
1、主轴伺服调试说明 (VER:0.20) 添加功能码FH组,町组。 备注:灰色,表示保留,请不要更改。备注:N (运行时不可修改)Y (运行时可修改)-(检测数据)功能码名称设定范围最小 单位出厂值更改0:非位置控制FH-00位置控制选择1:位置控制2:速度/转矩控制 位置控制(DI-41控制)3:位置控制 速度/转矩控制(DI-41控制)0Y0:跟踪或脉冲控制模式(Pcmd)FH-01位置控制模式1:点对点定位控制(AP2P)2: Pcmdv-AP2P(保留)3: AP2PPcmd(保留)1NFH-020:脉冲+方向(内部2倍频)1: 2相正父脉冲(内部4倍频)0N位直指令脉冲方式选择2: C
2、W+CCW (保留)FH-03位置指令脉冲信号交换0:无效1:有效,AB信号内部自动交换0NFH-04位置指令脉冲逻辑0:正逻辑1:负逻辑0NFH-05电子齿轮分子1655351NFH-06电子齿轮分母1655351NFH-07位置环比例增益0.01 200.001.50YFH-08保留0YFH-09保留0YFH-10位置环前馈增益0 150%100YFH-11位置环加速度前馈增益1200000YFH-12保留0YFH-13保留1NFH-14脉冲偏差滤波时间0 6400ms0YFH-15位置环输出滤波时间0 6400ms0YFH-16保留0YFH-170 10000pulse20Y定位完成信号
3、宽度FH-18定位附近信号宽度0 10000pulse50YFH-19脉冲偏差过大检测水平0 32767Pulse500YFH-20脉冲偏差过大检测时间0 10000ms100YFH-21原点检索速度0.00Hz上限频率5.00NFH-22原点检索方向0:正向1:反向2:当前方向0NFH-23定位零点选择0:编码器z信号1:端子开关0NFH-24伺服停机方式0:以转矩限定值紧急停车1:切换到速度控制停机1YFH-25传动比0.05020.0001.000YFH-26PG卡安装位置0:电机轴1:机床主轴0YFH-27脉冲控制的位置指令脉 冲的釆样滤波时间0 6400ms30YFH-28保留FH-
4、29定位完成后偏差极限0 1000pulse4Y在输出定位完成信号之后,若位置偏差小于该 功能码,则位置环不进彳丁调节。FH-30位置环比例增益20.01 200.001.50YFH-31FH-32保留 保留12000012000000YYFH-33位置环加速度前馈增益2120000150YFH-34切换频率10.00Hz切换频率2(FH-35)0.00YFH-35切换频率2切换频率1(FH-34)最大频率0.00Y当切换频率1(FH-34)和切换频率2(FH-35) 都为0时,位置环参数FH-30FH-33无效。FH-36脉冲端子UP/DOWN速率065535 pulse/s (4 倍频之后
5、)10 pulse/sYFH-37脉冲步讲量065535 pulse/次 (4 倍频之后)10 pulse/次YFJ-00第0位置低位0 99990YFJ-O1第0位置高位0655350YFJ-02第1位置低位0 99990YFJ-O3第1位置高位0655350Y FJ-62第31位置低位0 99990YFJ-63第31位置高位0655350Y位置指令=高位X 10000+低位。 单位为脉冲数。可通过U0-22杳看当前位置。通过DI-42,43,44, 45,46可选择第几位置FJ-64位置指令偏移脉冲数-9999327670NFJ-65位置指令单位脉冲数1655351NFJ-66位置指令单位
6、脉冲数小数 占八、-3: *0.001-2: *0.01-1: *0.10: *11: *102: *1003: *10000NFJ-67定位控制模式0:增量式1:绝对式2、分度盘2NFJ-68多段位置指令加速时间0.1s 6500.0s4.0sNFJ-69多段位置指令减速时间0.1s 6500.0s4.0sNFJ-70定位控制S曲线选择0:直线加减速1: S曲线1NFJ-71定位控制S曲线起始段结 束段比例0.1% 50.0%20.0%NFJ-72定位的开始速度10.00Hz最大频率20.00HzYFJ-73分度式定位方向选择0:正向1:反向2:当前方向3:与当前方向相反0Y设置为固定方向,
7、可基本消除齿轮间隙,提高 在不同运行方向下的定位精度。FJ-74定位的开始速度2 (反向 定位)0.00Hz最大频率1.00HzYFJ-75保留-1000+10005YFJ-76脉冲控制时的主机编码器 线数0655351024YFJ-77脉冲控制时速度偏差过大 检测值0.00Hz 50.00Hz5.00HzYFJ-78脉冲控制时速度偏差过大 检测时间0ms 65535ms500msYFJ-79脉冲控制时速度偏差过大 /脉冲偏差过大处理方式0:偏差过大时,报Err50/511:以第二频率运行其它:不检测Err50/Err512YF2-19速度反馈PG卡AB相序0-A超前B1-B超前A0NInov
8、ance当编码器AB相序接反时,可将该功能码设置 为1。F2-20速度反馈PG选择0-扩展PG1-本地PG1NF4-00F4-09DI端子功能选择41: SON:位置控制ON信号42:多段位置指令选择端子143:多段位置指令选择端子244:多段位置指令选择端子345:多段位置指令选择端子446:多段位置指令选择端子547:零点位置DI输入端子50:脉冲控制时,指令脉冲UP端子 51:脉冲控制时,指令脉冲DOWN端子 (UP/DOWN速率见功能码FH-36)52:脉冲控制时,扌曰令脉冲步进端子 (步进量见FH-37)DO21 :定位兀成信号22:定位接近信号23:脉冲控制的速度偏差过大24:速度
9、偏差过大AO编码器反馈速度-13F4-09F5-00保留 保留F5-01DO1F5-02DO2F5-03DO3F5-04RELAYF5-14DO端子有效状态选择0310Y脉冲偏差过大故障Err50说明。脉冲控制时,当脉冲偏差大于FH-19,且连续时间超过FH-20, 产生脉冲偏差过大标志。若FH-19为0,表示不检测该故障。脉冲控制时速度偏差过大故障Err51处理。例如,主机的AO(13)表示电机实际运行频率, 接至从机的AI2,从机的频率源为AI2。根据AI2的检测值和FJ-76,可得到主机运行频率, 与从机的反馈速度进行比较,若偏差值大于FJ-77,且持续时间大于FJ-78,则产生脉冲控I
10、novance制速度偏差过大标志。这样可以防止主机运行而从机不运行。当有脉冲控制时速度偏差过大/脉冲偏差过大标志时,根据FJ-79有多种处理方式。 0:报Err50/51,自由停车。1:以速度控制方式运行,根据AI2的检测值和FJ-76,可得到主机运行频率。 2:不报 Err50/51 故障。另外,当脉冲控制时速度偏差过大/脉冲偏差过大时, DO-23 输出信号。U0 组,仅作显示使用功能码名称最小单位出厂值更改U0-00运行频率0.01Hz-U0-01设定频率0.01Hz-U0-02母线电压-U0-03输出电压-U0-04输出电流-U0-05输出功率-U0-06保留-U0-07DI输入状态-
11、U0-08DO输出状态-U0-09AI1电压-U0-10AI2电压-U0-11保留-U0-12计数值-U0-13长度值-U0-14负载速度显示-U0-15PID设定-U0-16PID反馈-U0-17PLC步骤-U0-18PULSE IN脉冲频率-U0-19反馈速度0.1Hz-U0-20脉冲控制的给定脉冲频率-U0-21脉冲控制给定,电子齿轮之后对应的频率-U0-22当前位置-U0-23定位控制目标位置设定-U0-24位置偏差(4倍频之后)-U0-25脉冲控制的当前位置给定脉冲,电子齿轮之前U0-26脉冲控制的当前位置给定脉冲,电子齿轮之后U0-27反馈脉冲U0-29编码器Z信号的脉冲数-U0-
12、33辅助频率源Y显示-F5-14DO输出端子有效状态选 择出厂值0设定范围031按位设定DO输出端子的有效状态。0:正逻辑(闭合有效); 1:反逻辑(断开有效)。BIT位与DO的对应关系如下表:其余BIT4BIT3BIT2BIT1BIT0保留DO5DO4DO3DO2DO1若要设定某DO为反逻辑(断开有效),则将对应的BIT位设置为1,再将此二进制数转换为 十进制设于本功能码。主轴伺服的AI说明:1、AI2,与 320 致。2、AI1,改为了 4个点的曲线。F4-37,38,39,40,41,42,43,44,AI1设定曲线,4个点,最小值,最大值,2个中间点F4-37AI1最小输入-10.00
13、 V +10.00V0.00VYF4-38AI1最小输入对应设定-100.0% +100.0%0.0%YF4-39AI1拐点1输入-10.00 V +10.00VYF4-40AI1拐点1输入对应设定-100.0% +100.0%YF4-41AI1拐点2输入-10.00 V +10.00VYF4-42AI1拐点2输入对应设定-100.0% +100.0%YF4-43AI1最大输入-10.00 V +10.00V10.00VYF4-44AI1最大输入对应设定-100.0% +100.0%100.0%Y当定位端子(DI-41)有效时,若FH-OO设置为1 (位置控制)或者1 (速度/转矩控制-位置
14、控制)时,也可进行定位。通讯协议修改:D0xx/D1xx:写FH/FJ(掉电不记忆)E0xx/E1xx:读 FH/FJ,写 FH/FJ (掉电记忆)端子说明1 ) 控制板端子A+B+Z+PGPPEHDIDI1DI2DI3DI4DI5DI6DI7DI8DI9DI10DI11DI12AI1AI2AI3A-B-Z-COMCMEOPCOM24VDO1DO2DO3COMHDO24VCOM485+485-GNDGND10VAO1Inovance其中,A+,A-,B+,B-,Z+,Z-,PGP,COM为扩展 PG 卡端子,PGP 为 5V 电源。HDI 为 pulse in 端子;HDO 为 pulse o
15、ut 端子。DI1DI10 可用,DI11 和 DI12 保留。AI的范围为-10V+10V。CME和OP为DI和DO的外部电源端子,OP为电源,CME为地。 在控制板上,有跳线J5, J6选择外部电源。(2)本;机 PG卡端子A+A-B+B-Z+Z-COM5V分度控制简易调试说明:1、在进行定位控制之前,保证闭环矢量运行正常。2、将位置控制选择(FH-00)设为1 (位置控制)或者2 (速度/转矩控制-位置控制), 位置控制模式(FH-01)设为1 (点对点定位控制)。3、将定位控制模式(FJ-67)设为2 (分度盘)。4、根据现场设置位置环比例增益(FH-07), 般范围为0.503.50
16、。不能设置过大,否则 容易振荡。5、根据需要修改多段位置指令加速时间(FJ-68),多段位置指令减速时间(FJ-69)。6、若定位完成后有抖动,可设置FH-15(位置滤波时间),一般为30300mso或者,设置 FH-29 (定位完成后偏差极限),根据需要设定。脉冲跟踪调试说明:1、保证闭环矢量运行正常。2、将位将位置控制选择(FH-00)设为1 (位置控制),位置控制模式(FH-01)设为0 (跟 踪或脉冲控制模式)。3、正确设置电子齿轮比例。例如, 1200线编码器,发1 个脉冲,要求走1,则电子齿轮 为1200: 360,电子齿轮分子(FH-05)设为10,电子齿轮分母(FH-06)设为
17、3。4、将位置环比例增益(FH-07)设置为0,位置环前馈增益(FH-10)设为1.00,位置环加 速度前馈增益(FH-11)设置为0o5、确认位置控制的运行方向是否正确。 注意:变频器先运行,数控系统再发脉冲。否则电机会剧烈振动。若方向不正确,将位置指令脉冲逻辑(F H-04)设为1 (负逻辑)。6、确认变频器接收脉冲的个数和频率正确。7、 根据现场设置位置环比例增益(FH-07), 般范围为0.503.50。不能设置过大,否则 容易振荡。8、保持加速度前馈增益(FH-11)为0。逐渐增大比例增益,看停机位置是否准确。9、若停机时过冲较大,可设置加速度前馈增益(FH-11), 般范围为0.503.50。
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
