《智能仓储控制系统设计》由会员分享,可在线阅读,更多相关《智能仓储控制系统设计(3页珍藏版)》请在装配图网上搜索。
1、智能仓储控制系统设计作者:滕俊杰来源:科技资讯2012年第13期滕俊杰(许昌技师学院河南许昌461000)摘要:本文系统地介绍了整个仓储系统的运行模式和如何运用PLC实现仓储自动化的工作 原理。首先根据已经给定的仓储模型,选择中小型、安装要求不高、维护方便的各个点的行程开 关、颜色传感器和气缸。运用气压驱动关节型机器人来实现物料的拾取和搬运。确保在拾取物 料的准确度和稳定性。本文给出了利用三菱PLC控制系统完成智能拾取、分拣机构、入库的程 序设计。该智能仓储控制系统给出了一种智能化、经济型的仓库自动化设计方案。关键词:关节型机器人运动矩阵行程开关物流智能化分拣机构中图分类号:TP242文献标识
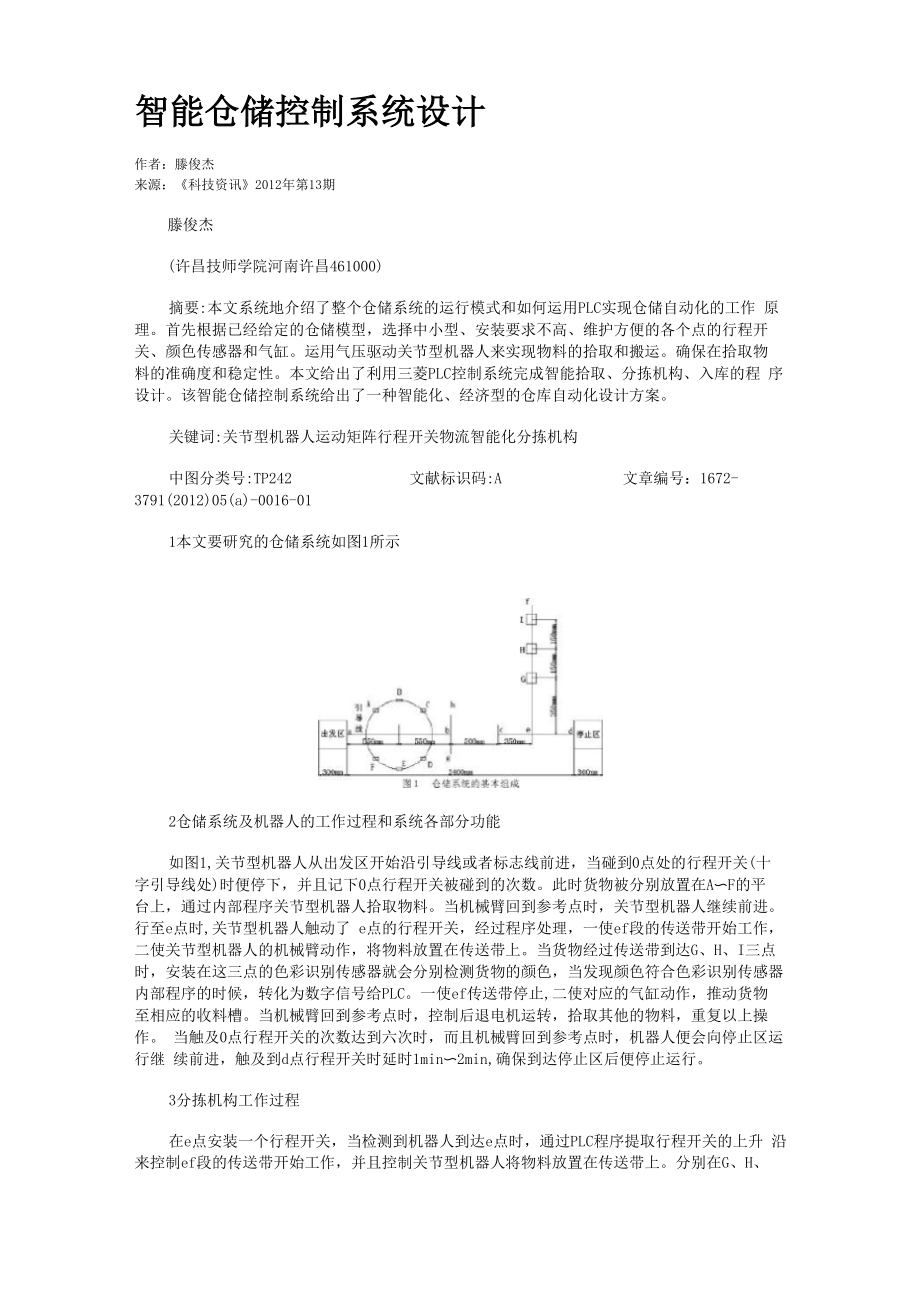
2、码:A文章编号:1672-3791(2012)05(a)-0016-011本文要研究的仓储系统如图1所示2仓储系统及机器人的工作过程和系统各部分功能如图1,关节型机器人从出发区开始沿引导线或者标志线前进,当碰到0点处的行程开关(十 字引导线处)时便停下,并且记下0点行程开关被碰到的次数。此时货物被分别放置在AF的平 台上,通过内部程序关节型机器人拾取物料。当机械臂回到参考点时,关节型机器人继续前进。 行至e点时,关节型机器人触动了 e点的行程开关,经过程序处理,一使ef段的传送带开始工作, 二使关节型机器人的机械臂动作,将物料放置在传送带上。当货物经过传送带到达G、H、I三点 时,安装在这三点
3、的色彩识别传感器就会分别检测货物的颜色,当发现颜色符合色彩识别传感器 内部程序的时候,转化为数字信号给PLC。一使ef传送带停止,二使对应的气缸动作,推动货物 至相应的收料槽。当机械臂回到参考点时,控制后退电机运转,拾取其他的物料,重复以上操作。 当触及0点行程开关的次数达到六次时,而且机械臂回到参考点时,机器人便会向停止区运行继 续前进,触及到d点行程开关时延时1min2min,确保到达停止区后便停止运行。3分拣机构工作过程在e点安装一个行程开关,当检测到机器人到达e点时,通过PLC程序提取行程开关的上升 沿来控制ef段的传送带开始工作,并且控制关节型机器人将物料放置在传送带上。分别在G、H
4、、I三点安装红、白、黑三色颜色传感器,传送带将工件运送至G点时,当G点颜色传感器(红色) 检测到工件为红色时,G点颜色传感器发出信号,通过PLC程序,此时一使传送带停止便于物料停 止位置和收料槽在一条直线上,二使G点的气缸动作,从而将红色工件送入对应的收料槽;若检测 到G点工件不是红色,则G点气缸不采取任何动作,而是由传送带将该工件运送至H点;当H点颜 色传感器(白色)检测到工件为白色时,H点颜色传感器发出信号,通过PLC程序,一使传送带停止 便于物料停止位置和收料槽在一条直线上,二使H点的气缸动作,从而将白色工件送入对应的收 料槽;若检测到H点工件不是白色,则H点气缸不采取任何动作,而是由传
5、送带将该工件运送至I 点;当I点颜色传感器(黑色)检测到工件为黑色时,I点颜色传感器(X004)发出信号,通过PLC程 序,一使传送带停止便于物料停止位置和收料槽在一条直线上,二使I点的气缸(Y004)动作,从而 将黑色工件送入对应的收料槽。当机器人的机械臂回到参考点并且末端执行器没有物料时候,机 器人回头拾取第二个物料。4实现关节型机器人的控制过程工件装卸检测电路,若机器人经过距离a点550mm处的工件装载点时,通过光电传感器一来 控制机器人暂停前进,同时给PLC发信号启动关节型机器人实现物料的抓取。在抓取的过程中, 根据6个物料分布在以机器人停止点为圆心的圆周上面,末端执行器采用气动真空抽
6、吸和真空吹 气的形式。当末端执行器吸有物料的时候,光电传感器检测到有物料,此时机械臂返回参考点,当 参考点的位置开关被触动,才能使得机器人继续前进。送物料的时候同样的原理,真空吹气,末端 执行器上面的传感器检测到没有物料,而且机械臂回到参考点才能启动机器人进行下一个物料的 拾取和循环。此时为了保证装载有工件的机器人能平稳运行,必须将机器人手臂的位置(参考点) 调整至与运行方向在同一平面内。直到从AF工件全部装载完毕。5机器人运动矩阵方程式为了便于理解,我们以三自由度的关节机器人为例,然后按照机座、关节及机械接口坐标系 的确定方法确定坐标系的方向。地撇H陽删船砒朋参考文献1 冯辛安工业机器人设计J.机械制造装备设计,2005,12:213239.2 耿学文,华熔微机可编程控制器原理、使用及应用实例M.北京电子工业出版 社,1996:178 183.3 王永华现代电气控制及PLC应用技术M.北京航空航天大学出版社,2003.4 鲁晓春.仓储自动化M.北京:清华大学出版社,2002.5 李科杰新编传感器技术手册M.哈尔滨:哈尔滨工业大学出版社,2002.
 智能仓储控制系统设计
智能仓储控制系统设计