 弹性力学课程学习指南
弹性力学课程学习指南

《弹性力学课程学习指南》由会员分享,可在线阅读,更多相关《弹性力学课程学习指南(12页珍藏版)》请在装配图网上搜索。
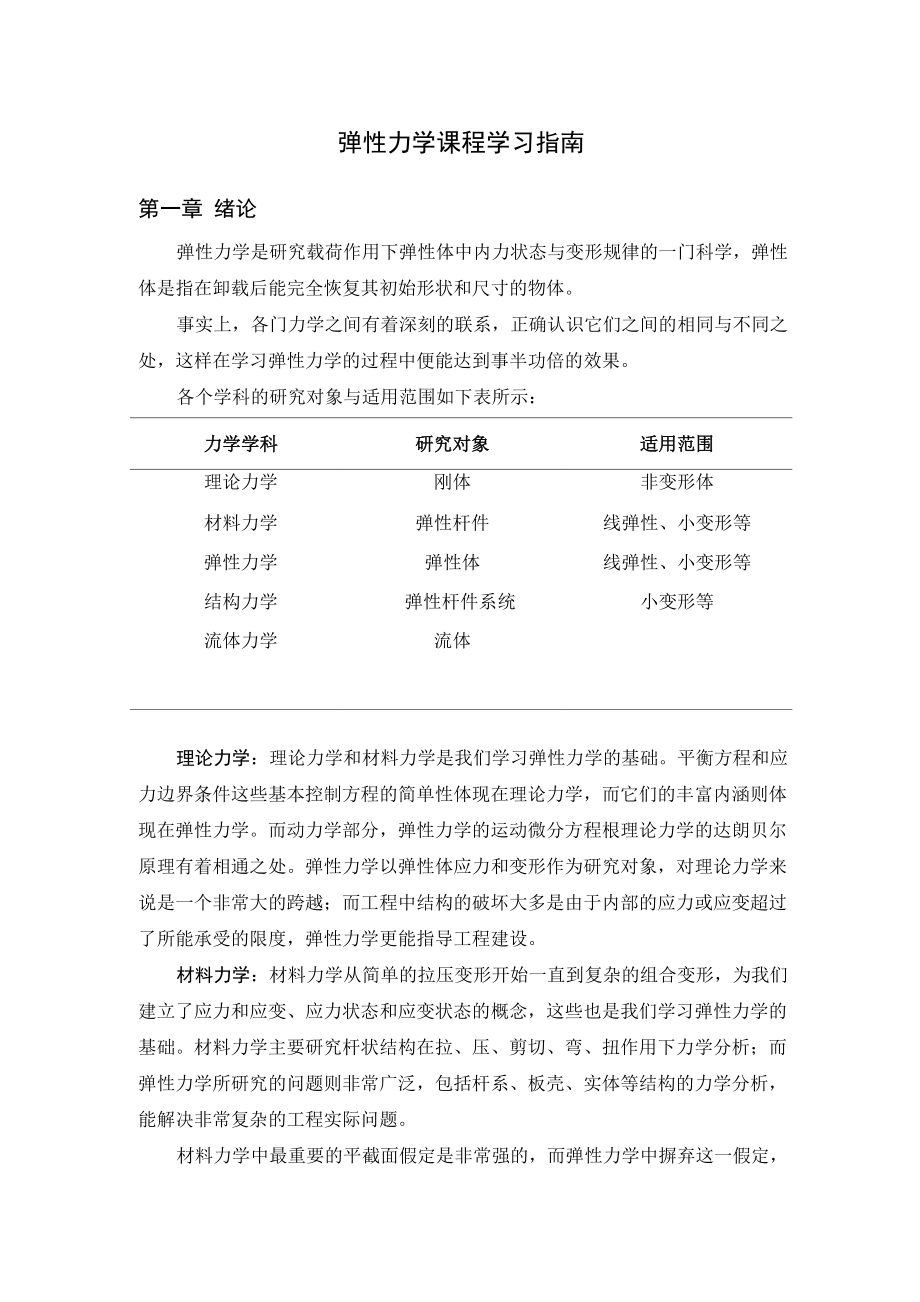
1、弹性力学课程学习指南第一章 绪论弹性力学是研究载荷作用下弹性体中内力状态与变形规律的一门科学,弹性 体是指在卸载后能完全恢复其初始形状和尺寸的物体。事实上,各门力学之间有着深刻的联系,正确认识它们之间的相同与不同之 处,这样在学习弹性力学的过程中便能达到事半功倍的效果。各个学科的研究对象与适用范围如下表所示:力学学科研究对象适用范围理论力学刚体非变形体材料力学弹性杆件线弹性、小变形等弹性力学弹性体线弹性、小变形等结构力学弹性杆件系统小变形等流体力学流体理论力学:理论力学和材料力学是我们学习弹性力学的基础。平衡方程和应 力边界条件这些基本控制方程的简单性体现在理论力学,而它们的丰富内涵则体 现在
2、弹性力学。而动力学部分,弹性力学的运动微分方程根理论力学的达朗贝尔 原理有着相通之处。弹性力学以弹性体应力和变形作为研究对象,对理论力学来 说是一个非常大的跨越;而工程中结构的破坏大多是由于内部的应力或应变超过 了所能承受的限度,弹性力学更能指导工程建设。材料力学:材料力学从简单的拉压变形开始一直到复杂的组合变形,为我们 建立了应力和应变、应力状态和应变状态的概念,这些也是我们学习弹性力学的 基础。材料力学主要研究杆状结构在拉、压、剪切、弯、扭作用下力学分析;而 弹性力学所研究的问题则非常广泛,包括杆系、板壳、实体等结构的力学分析, 能解决非常复杂的工程实际问题。材料力学中最重要的平截面假定是
3、非常强的,而弹性力学中摒弃这一假定,其基本假定为:连续性假定(即连续介质)、均匀性假定(即认为物体由同一类 型材料均匀组成)、各向同性假定(采用各向同性的本构关系)、线弹性假定(外 力与变形线性变化)、小变形假定、无初应力假定。弹性力学解要更准确,但同 时求解也更加复杂。例如,以均布压力作用下梁的弯曲问题为例,材料力学给出 的梁的弯曲应力为Mc = y, c = 0x Iy2y其中M为弯矩,I为截面惯性矩;而弹性力学的解答为1+其中q为均布力大小,h为截面高度;可见弹力的解能满足应力边界条件,是精 确的解,而材力给出的为近似解。流体力学:流体力学跟弹性力学也有着非常密切的关系,二者的研究对象流
4、 体和弹性体都是宏观意义上的连续介质,可以认为它们都是连续介质力学的分 支。当然流体与固体内在属性是不同的,流体不能承受拉力,在静止状态下也是 不能承受剪力的,由于这些原因,这两个学科处理问题的出发点和方式也是不同 的,关于这方面更详细的了解可以参考连续介质力学类教材。第二章 张量分析张量分析是研究张量和以张量为自变量的函数的性质和运算规则的数学工 具。而张量是不依赖与坐标系的选择而改变的不变量。已知物理量的大多数都可 以表示未张量;如时间、长度、温度、质量等基本物理量,是0 阶张量,也称为 标量;位移、速度、加速度、力等物理量则是1 阶张量,也称矢量;而我们弹性 力学中的应力、应变等量则是
5、2阶张量;描述一种材料弹性性质的弹性张量则为 4 阶张量。总之张量普遍存在,而且在各个学科,特别是连续介质力学,有着广泛的应 用。张量凭借其严密的理论基础,非常简洁的表达形式,现在已经成为大多数现 代应用力学文献的基本语言。因此掌握张量不光对我们弹性力学的学习非常有帮 助,而且也会使我们阅读文献变得更加容易。张量的简洁性毋庸置疑,如笛卡尔坐标系下的平衡微分方程可以表示为:do比Qt石+斗+ 注+ f = 0QxQyQzxQtQoQt密 + y + 密 + f = 0QxQyQzyQtQtQozx + 徑 + z + f = 0QxQyQzz而用张量指标符号可表示为O + f 二 0ji ,j
6、i在张量的学习过程中,首先要掌握张量的基本概念、爱因斯坦求和约定。如果在表达式的某项中,某指标重复地出现两次,则表示要把该项在该指标的取值范围内遍历求和(即爱因斯坦求和约定)。重复的指标称为哑标,在书写张量方 程时要注意,某项中某个指标最多只能出现两次,如o二0便不是一个正确的ii,i张量方程;另外只出现一次的指标为自由指标,要注意的是一个方程中各项的自 由指标必须相同,否则就是一个错误的张量方程。可以通过做题加深对张量的理 解。另外有两个非常重要的张量5 (单位张量)和e(置换张量)是需要我们ij rst掌握和理解的;5和e分别于矢量代数中的点积和叉积有关,即ij rste e =5i j
7、ija,b,c = a-(bxc) = e.b cijk i j k其中e.为单位矢量,a,b,c为任意矢量。i同样还可以用置换张量来表示三阶行列式的值a a a111213a a a = a a a + a a a + a a a a a a a a a a a a21222311 22 3321 32 1331 12 2331 22 1321 12 3311 32 23a a a313233=e a a a =e a a aijk i1 j2 k3 ijk 1i 2j 3ke 5 恒等式为e e = 5 5 5 5ijk ist js kt ks jt退化形式为e e = 25ijk rj
8、k ire e =6ijk ijk另外一个非常重要的知识点是坐标与坐标转换,实际问题中我们可能知道一 个坐标系下的应力或者应变分量,需要求其在其他坐标系下应力应变分量,用张 量进行处理则会非常简单,而且也比较方便得到应力应变的主值。通过坐标转换 也可以比较容易得多柱坐标或者球坐标系的平衡方程、几何方程。关于坐标转换 的详细内容可参考课本或者课件。第三章 应力理论本章要掌握外力、内力与应力的基本概念。应力有名义应力与真实应力之分, 但是弹性力学主要研究小变形问题,因此二者并无差别。本章介绍了应力分量转换、主应力、应力不变量等内容,需要具有一定的张 量知识。另外通过对微元体的平衡分析可以得到弹性力
9、学的平衡微分方程o + f 二 0ji ,j i 有一点需要注意的是,在对微元体列平衡方程时参与平衡的量一定是力而不能是 应力。柯西公式(即面力边界条件)是本章非常重要的一个知识点,其公式如下p = v - CT其中p为面力矢量,v为法向单位矢量,o为应力张量。在实际问题中要求我们 能够快速、正确写出系统的边界条件。第三章 应变理论本章用运动学观点研究物体的变形。在连续介质力学中有两种描述位移的方法:拉格朗日描述法:以物体变形前的初始构型 B 为参考构型,质点变形前的 坐标a =(a ,a ,a )为基本未知量。将变形后物体的位置x表示为a ,a ,a的函数i 1 2 3 1 2 3x=x(a
10、), x =x (a ,a ,a )i i 1 2 3欧拉描述法:以物体变形后的新构型 B 为参考构型,质点变形后的坐标x = (X ,x ,x)为基本未知量。将变形前物体的位置a表示为x ,x ,x的函数i 1 2 3 1 2 3a =a(x), a =a (x ,x ,x )i i 1 2 3变形梯度为F da变形梯度是非常重要的一个物理量。借助于变形梯度,我们可以写成格林应 变张量变形梯度的表达式也可写为该式是非常重要的一个公式,即包含大小又有方向的变化dxda,v 一dSdS)T .(F -v)-(dS )2 C -Ft -F -v)2G s +Xe 8ijkk ijvd S F -
11、vdS , v0n(dS ) (dS )(F - v00认清这一点,可以很方便的求解伸长比与变形后线元的方向第四章 本构关系本章中比较重要的两个知识点是广义胡克定律和应变能密度。广义胡克定律:1 +v vij=Ec ij - E c kk 厂 c ij在本构关系的应用中要注意平面应变与平面应力的区别,没有应力不代表该 方向没有应变,反之也是如此。弹性力学中研究的是线弹性体,因此总可以找到一个应变能密度函数W (s.)使dWW (s ) j eijc ds , Q ij 0 ij ij ijdsij在线弹性小变形情况下,可以将应变能密度展开为1W ic s s2 ijkl ij kl其中c.“为
12、4阶弹性张量。ijkl借助于应变能密度表达式和应力应变张量的对称性,我们可以很容易得到弹 性张量的对称性C = C = C C = Cijkl jikl ijlk ijkl klij第六弹性理论的微分提法、解法及一般原理本部分内容首先给出弹性理论的微分提法,把弹性力学问题归结为偏微分方程的边值问题。学好本章的内容后,再学习平面问题,必然会比较容易。 控制方程是弹性力学的基石首先,给出笛卡尔坐标系下的弹性力学控制方程平衡方程b + f 二 0 ij ,i jGV 2u + (G + 1)0 + f = 0i, iiII物理方程ij其中,剪切弹性模量Gb8 , b = 2G +九 5E ij E
13、kk ij ij ij kk ij,梅拉常数九=EV2(1+v )(1+v )(1-2v)III几何方程=(U + U )c ij 2 i, jj ,i(b) n = fij s j i其中应力边界S与位移S满足S I S =0 .bub u以上各式共同组成了弹性力学的基本体系(u) ui s i一些讨论:1) 一般地,i, j = 1,2,3,即为空间问题,共15个未知量,15个控制方程,方程组封闭.若b = 0,t =t = 0,则问题蜕化为平面应力问题,若z zx zy =0,t =t =0,问题转化为平面应变问题z zx zy此外,弹性力学问题总是超静定问题,因此需要联立平衡方程、物理
14、方程、几何方程方能求解。2)对于平面问题,借助直角坐标和极坐标的转换关系(也可仿照直角坐标下推导控制方程的方法推导),可得极坐标下的控制方程:平衡方程da1 6ta a宀 +p + p4 + f = 0dpp 6pp1 da6t2t4 + p + p + f = 0p ddpp II物理方程8 =j-5 aij2GE ij kkIII几何方程du8 =p-pdpu 1 du8 = P +令申 p p d申1 duduuY =p +4 p p 64dp p物理方程对各类问题均是适用的,因为不管是直角坐标、极坐标、球坐标、 柱坐标,它们的共同点都是正交的坐标系需要指出的是,在不同坐标系下,控制方程
15、形式上有所不同,但推导基本原 理一致,基本内涵也一致比如平衡微分方程是根据静力学平衡原理推导的,物 理方程反应了研究对象的物性,几何方程则紧扣应变的定义。E3)由平面应力问题到平面应变问题转换,只需将E替换为,-替换为1 - 2即可;由平面应变问题解答转换为平面应力问题解答将E替换为, 1 -(1 + - J24)上述任何一个方程只要作适当修改,便可推广到塑性、温度应力、波动等问题如波动问题,与静力问题相比,物理方程、几何方程一致,运动微分方 程增加一惯性力项,形式如下a + f - pU& 二 0ij ,ij j类似地,对于温度应力问题,假设温度变化仅引起线应变,并且膨胀系数 各向同性,那么
16、物理方程成为8 = j -8 c +aAT8ij 2G E ij kkij相应地,应力分量表达二 2G8 +X8 8 + (3九 + 2G)aAT8ijijij kkij由此可见,我们可以根据适当的条件,引入相应的假设,对弹性力学的基本 控制方程作合理修改,即可得到更加符合实际情况的控制方程也就是说,弹性 力学基本方程为整个固体力学控制方程构建提供了基本框架求解思路 在整个弹性力学体系中,控制方程求解占据着重要位置如果说控制方程是 弹性力学大厦的基础,那么对控制方程求解则构成了这座大厦的主体主要求解 方法可分为解析法和近似法用解析法求解,有两大思想贯穿始终,即:“尽可能减少方程中未知数的数 目
17、”,“将边界条件人为放松”前者诞生了各种应力函数、位移函数,后者则诞 生了圣维南原理可以说,这两种思想为整个弹性力学求解体系的完善和发展注 入了强大活力根据选取的基本未知量的不同,基本方程求解方法大体上分为三种:按应力 求解,按位移求解以及混合求解位移解法是以位移分量U为基本未知量,利用位移表示的平衡方程解出U ,ii 再代回几何方程和本构方程,求出应变和应力分量8 ,c 。当全部边界给定位移 ij ij时,用位移法较简单。应力解法则是以应力分量为基本未知量。对于全部边界给定外力的边值问 题,应力解法可以直接解出工程中关心得应力分量,但是应力解法处理位移边界 条件非常困难。在应力解法中可以引进
18、某些自动满足平衡方程的函数,即应力函数,合理利 用应力函数可以有效减少未知量个数(但方程阶数会相应升高),给求解带来简 便,特别是针对平面问题,通过引入 Airy 应力函数,可以将三个应力分量减少 为只用求一个未知量应力函数,而只用求解一个双协调方程。由于弹性力学的线弹性小变形假设,我们可以利用迭加原理求解复杂载荷作 用下力学分析;另外还有解的唯一性原理、圣维南原理,理解这些一般原理对我 们更深入地理解弹性力学非常有帮助。本章建立了弹性力学解题的一般思路,因此也是非常重要的,需要多做练习, 加深理解。另外要说明的,在实际问题中能得到解析解的问题非常少,大部分问 题我们都无法得到解析解,这时候就
19、需要用数值方法(近似法)来求解。第七章 柱形杆问题柱形杆问题是最早应用圣维南原理的典型例子。通过本章的学习可以看到, 对于均匀拉压(杆结构)、纯弯和圆轴扭转问题,材料力学解是精确的。但是对 于一般弯曲和非圆截面扭转问题,弹性力学可以提供更通用的解法和更精确的结 果。本章要掌握什么是柱形杆问题、柱形杆自由扭转的位移解法和应力函数解 法。更详细的内容可以参加教材。第八章 平面问题平面问题是空间问题的特殊情况。弹性力学解题的基本思路在第六章已经说 明。这一章首先要明确平面应力和平面应变的概念。本章重点介绍了平面问题的应力函数解法。需要我们根据应力函数的性质, 利用边界载荷估计应力函数的分布规律,从而
20、给出应力函数的一个合理假设,这 对解题非常重要。第九章 能量原理在第六章中我们建立了弹性力学的微分提法,是从微元入手,建立基本微分 方程,在给定边界条件下求解微分方程的边值问题。而本章介绍弹性力学的另一 个提法变分提法(又称能量原理),变分方法考虑整个系统的能量关系,建 立泛函变分方程,为在给定约束条件下,求泛函极值的变分问题。能量原理在弹性力学体系中是非常重要的一环。实际问题中大部分问题都不 可能得到解析解,需要寻求数值解,而能量原理为数值解的获得创造了可能性。变分问题有欧拉法和直接法两种解法。该章中有很多基本概念需要掌握和理 解,比如弹性力学的三类基本关系:变形关系、静力关系、本构关系;真
21、实状态、 静力可能状态、变形可能状态,变形功、可能功与虚功,应变能、应变余能、势 能;这些基本概念的理解非常重要。可能功原理:可能外力(体力和面力)在可能位移上所做的功等于可能应力 在相应可能应变上所做的功。可能功原理推导中与本构关系无关,适用于任何连 续介质力学,但是用到了小变形的几何方程,因此只适用于小变形。在可能功原 理用于线弹性体就可以导出功的互等定理,即线弹性体受两组不同的力作用,则 第一组力在第二章力引起的位移上所做的功等于第二组力在第一组力引起的位 移上所做的功。功互等定理的优点是可以避免求解物体内应力、应变和位移场的 复杂过程,直接从整体变形的角度来处理问题。最小势能原理:在一
22、切变形可能的状态中,真实状态的总势能最小。目前大 部分有限元软件,如ABAQUS等,都是以最小势能原理为基础来求解弹性力学 问题。理解最小势能原理也能帮助我们更好的理解和应用有限元。最小余能原理是指在一切应力可能的状态中,真实状态的总余能最小。最小势能原理通过假设位移模式求解,因此系统偏刚硬,求出的位移解总体 偏小;而最小余能原理通过假设应力模式求解,系统偏柔软,求出的应力解总体 偏大。能量原理是弹性力学中非常重要的一个方法。更详细的内容可以参考课本或 者课件。第十章 热应力通常的材料都具有热胀冷缩的性质,当温度改变时,弹性体各部分就会因膨 胀或收缩而变形。当物体受外部约束或者内部变形不协调时
23、,物体内就会产生附 加的应力(热应力)。在前面各章中,我们学习了在外载作用下弹性体的力学分 析,本章内容就相对简单。本章主要考虑线性热弹性问题,由于所有基本方程和 边界条件都是线性的,因此当温度变化与载荷作用同时存在时,可以利用迭加原 理进行解题。由于热的存在,材料的本构关系发生变化,即应变由热变形和应力所致变形 两部分组成,即Q V8 = j -8 q+aAT8ij2GE ij kkij结束语弹性力学是一门理论性非常强的一门课程,因此要学好弹性力学,必须投入 一定的时间与精力,做好课前预习,上课时要认真听讲,做好笔记,以理解为主, 有问题时一定要及时跟老师沟通或者跟同学讨论,共同促进本课程的学习。
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
