 下水箱液位前馈
下水箱液位前馈

《下水箱液位前馈》由会员分享,可在线阅读,更多相关《下水箱液位前馈(24页珍藏版)》请在装配图网上搜索。
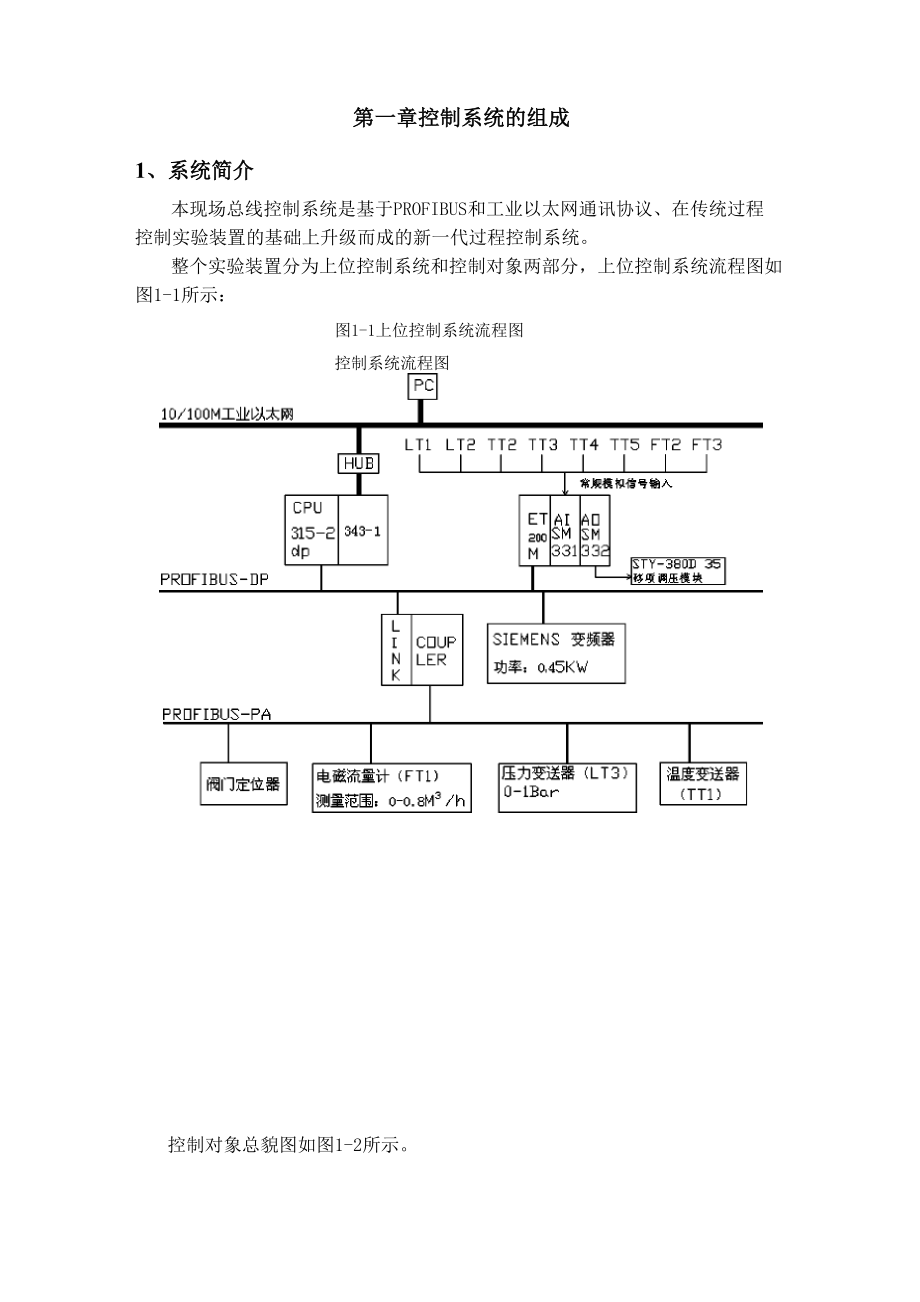
1、第一章控制系统的组成1、系统简介本现场总线控制系统是基于PROFIBUS和工业以太网通讯协议、在传统过程 控制实验装置的基础上升级而成的新一代过程控制系统。整个实验装置分为上位控制系统和控制对象两部分,上位控制系统流程图如 图1-1所示:图1-1上位控制系统流程图控制系统流程图控制对象总貌图如图1-2所示。1-2控制对象总貌图13薈盲沖4SP2、系统组成本实验装置由被控对象和上位控制系统两部分组成。系统动力支路分两路: 一路由三相(380V交流)磁力驱动泵、气动调节阀、直流电磁阀、PA电磁流量 计及手动调节阀组成;另一路由变频器、三相磁力驱动泵(220V变频)、涡轮流 量计及手动调节阀组成。1
2、. 被控对象被控对象由不锈钢储水箱、上、中、下三个串接圆筒形有机玻璃水箱、4.5Kw 电加热锅炉(由不锈钢锅和锅炉夹套构成)、冷热水交换盘管和敷塑不锈钢管路组 成。水箱:包括上水箱、中水箱、下水箱和储水箱。上、中、下水箱采用淡蓝色 圆筒型有机玻璃,不但坚实耐用,而且透明度高,便于学生直能接观察到液位的 变化和记录结果。上、中水箱尺寸均为:d=25cm,h=20 cm ;下水箱尺寸为: d=35cm,h=20 cm。每个水箱有三个槽,分别是缓冲槽,工作槽,出水槽。储水箱 尺寸为:长X宽X高=68cmX52cmX43cm。储水箱内部有两个椭圆形塑料过滤网 罩,防止两套动力支路进水时有杂物进入泵中。
3、模拟锅炉:此锅炉采用不锈钢制成,由加热层(内胆)和冷却层(夹套)组 成。做温度实验时,冷却层的循环水可以使加热层的热量快速散发,使加热层的 温度快速下降。冷却层和加热层都装有温度传感器检测其温度。盘管:长37米(43圈),可做温度纯滞后实验,在盘管上有两个不同的温 度检测点,因而有两个不同的滞后时间。在实验过程中根据不同的实验需要选择 不同的滞后时间。盘管出来的水既可以回流到锅炉内胆,也可以经过涡轮流量计 完成流量滞后实验。管道:整个系统管道采用敷塑不锈钢管组成,所有的水阀采用优质球阀,彻 底避免了管道系统生锈的可能性。有效提高了实验装置的使用年限。其中储水箱 底有一个出水阀,当水箱需要更换水
4、时,将球阀打开让水直接排出。2、检测装置压力传感器、变送器:采用SIEMENS带PROFIBUS-PA通讯协议的压力传感器 和工业用的扩散硅压力变送器,扩散硅压力变送器含不锈钢隔离膜片,同时采用 信号隔离技术,对传感器温度漂移跟随补偿。压力传感器用来对上、中、下水箱 的液位进行检测,其精度为0.5级,因为为二线制,故工作时需串接24V直流电 源。温度传感器:本装置采用六个PtlOO传感器,分别用来检测上水箱出口、锅 炉内胆、锅炉夹套以及盘管的水温。六个PtlOO传感器的检测信号中检测锅炉内 胆温度的一路到SIEMENS带PROFIBUS-PA通讯协议的温度变送器,直接转化成数 字信号;另外五路
5、经过常规温度变送器,可将温度信号转换成420mADC电流 信号。Pt100传感器精度高,热补偿性能较好。流量传感器、转换器:流量传感器分别用来对调节阀支路、变频支路及盘管 出口支路的流量进行测量。涡轮流量计型号:LWGY-10,流量范围:01.2m3/h, 精度:1.0%。输出:420mA标准信号。本装置采用两套流量传感器、变送器分 别对变频支路及盘管出口支路的流量进行测量,调节阀支路的流量检测采用 SIEMENS带PROFIBUS-PA通讯接口的检测和变送一体的电磁式流量计。3 执行机构调节阀:采用SIEMENS带PROFIBUS-PA通讯协议的气动调节阀,用来进行控 制回路流量的调节。它具
6、有精度高、体积小、重量轻、推动力大、耗气量少、可 靠性高、操作方便等优点。由CPU直接发送的数字信号控制阀门的开度,本气动 调节阀自动进行零点校正,使用和校正都非常方便。变频器:本装置采用SIEMENS带PROFIBUS-DP通讯接口模块的变频器,其输 入电压为单相AC220V,输出为三相AC220V。水泵:本装置采用磁力驱动泵,型号为16CQ-8P,流量为32升/分,扬程为 8米,功率为180W。泵体完全采用不锈钢材料,以防止生锈,使用寿命长。其中 一只为三相380V恒压驱动,另一只为三相变频220V输出驱动。可移相SCR调压装置:采用可控硅移相触发装置,输入控制信号为420mA 标准电流信
7、号。输出电压用来控制加热器加热,从而控制锅炉的温度。电磁阀:在本装置中作为气动调节阀的旁路,起到阶跃干扰的作用。电磁阀 型号为:2W-160-25 ;工作压力:最小压力为OKg/cm 2,最大压力为7Kg/cm 2 ; 工作温度:一580C。4. 控制器控制器采用SIEMENS公司的S7300 CPU,型号为315-2DP,本CPU既具有能 进行多点通讯功能的MPI接口,又具有PROFIBUS-DP通讯功能的DP通讯接口。5、空气压缩机用于给气动调节阀提供气源,电动机的动力通过三角胶带传带动空压机曲轴 旋转,经连杆带动活塞做往复运动,使汽缸、活塞、阀组所组成的密闭空间容积 产生周期变化,完成吸
8、气、压缩、排气的空气压缩过程,压缩空气经绕有冷却翅 片的排气铜管、单向阀进入储气罐。空压机设有气量自动调节系统,当储气罐内的气压超过额定排气压力时,压 力开关会自动切断电源使空压机自动停止工作,当储气罐内的气体压力因外部设 备的使用而下降到额定排压以下0.2-0.3Mpa时,气压开关自动复位,空压机又 重新工作,使储气罐内压缩空气压力保持在一定范围内。3、电源控制台(仅早期控制系统需依赖电源控制台,升级后的现场总线控制 系统本身已集成电源控制部分)电源控制屏面板:充分考虑人身安全保护,带有漏电保护空气开关、电压型 漏电保护器、电流型漏电保护器。仪表综合控制台包含了原有的常规控制系统,由于它预留
9、了升级接口,因此 它在总线控制系统中的作用就是为上位控制系统提供信号。4、总线控制柜总线控制柜有以下几部分构成:1、控制系统供电板:该板的主要作用是把工频AC220V转换为DC24V,给主 控单元和DP从站供电。2、控制站:控制站主要包含CPU、以太网通讯模块、DP链路、分布式I/O DP 从站和变频器DP从站构成。3、温度变送器:PA温度变送器把PT100的检测信号转化为数字量后传送 给DP链路。5、系统特点 被控参数全面,涵盖了连续性工业生产过程中的液位、压力、流量及温度等 典型参数。 本装置由控制对象、综合上位控制系统、上位监控计算机三部分组成。 真实性、直观性、综合性强,控制对象组件全
10、部来源于工业现场。执行器中既有气动调节阀,又有变频器、可控硅移相调压装置,调节系统除 了有设定值阶跃扰动外,还可以通过对象中电磁阀和手动操作阀制造各种扰 动。 一个被调参数可在不同动力源、不同执行器、不同的工艺管路下演变成多种 调节回路,以利于讨论、比较各种调节方案的优劣。系统设计时使2个信号在本对象中存在着相互耦合,二者同时需要对原独立 调节系统的被调参数进行整定,或进行解耦实验,以符合工业实际的性能要 求。能进行单变量到多变量控制系统及复杂过程控制系统实验。各种控制算法和调节规律在开放的实验软件平台上都可以实现。6、装置的安全保护体系(仅早期控制系统有此电源控制部分,升级后的现场总线控制系
11、统本身已集成电源控制部分)1、三相四线制总电源输入经带漏电保护器装置的三相四线制断路器进入系 统电源后又分为三相电源支路和不同的单相支路,每一支路给各自的负载供电。 总电源设有通电指示灯和三相指示表。2、控制屏电源由接触器通过起、停按钮进行控制。屏上装有一套电压型漏电保护装置和一套电流型漏电保护装置。控制屏内 或强电的输出(包括实验中的连线)若有漏电现象,即告警并切断总电源,以确 保实验安全。3、控制屏设有服务管理器(即定时器兼报警记录仪),为指导老师对学生 实验技能的考核提供一个统一的标准。4、各种电源及各种仪表均有可靠的保护功能。5、实验强电接线插头采用封闭式结构,防止触电事故的发生。6、
12、强、弱电连线插头采用不同的结构插头,以防止强弱电用电插头的混淆。第二章上位机组态软件简介本套控制系统上位机监控软件采用SIEMENS公司的上位监控组态软件SIMATIC WINCC。1、町NCC概述西门子视窗控制中心 SIMATIC WinCC(Windows Con trol Cent er)是 HMI/SCADA 软件中的后起之秀,1996年进入世界工控组态软件市场.当年就被美国Control Engineering杂志评为最佳HMI软件,以最短的时间发展成第三个在世界范围内 成功的SCADA系统;而在欧洲,它无可争议地成为第一。在设计思想上,SIMATIC WinCC秉承西门子公司博大精
13、深的企业文化理念, 性能最全面、技术最先进、系统最开放的HMI/SCADA软件是WinCC开发者的追求。 WinCC是按世界范闱内使用的系统进行设计的,因此从一开始就适合于世界上各 主要制造商生产的控制系统。如A-B,Modicon,GE等,并且通讯驱动程序的种类 还在不断地增加。通过OPC的方式WinCC还可以与更多的第三方控制器进行通汛。WinCC V6.0 采用标准 Microsoft SQL Server2000(WinCC V6.0 以前版本 采用Sybase)数据库进行生产数据的归档,同时具有Web浏览器功能,可使经理、 厂长在办公室内看到生产流程的动态画面,从而更好地调度指挥生产
14、,是 工业企业中从MES和ERP系统首选的生产实时数据平台软件。作为SIMATIC WinCC全集成自动化系统的重要组成部分,WinCC确保与 SIMATIC S5,S7和505系列的PLC连接的方便和通讯的高效;WinCC与STEP7 编程软件的紧密结合缩短了项目开发的周期。此外,WinCC还有对SIMATIC PLC 进行系统诊断的选项,给硬件维护提供了方便。2、WINCC的通讯连接和画面组态方法WINCC的通讯连接是组态上位机监控界面的第一步。在WINCC的变量管理器 里添加新的驱动程序之后,你就会看到WINCC有很多种通讯连接方式,根据你的 通讯硬件配置选取正确的通讯连接方式。WINC
15、C比较常用的的通讯方式有MPI、 PR0FIBUS和工业以态网,本系统在上位监控机和控制器之间采用工业以太网方 式通讯,在控制器和现场装置之间采用PROFIBUS方式通讯。PROFIBUS (过程现场总线)和工业以太网都是一种用于单元级和现场级的子 网。PROFIBUS用于在少数几个通讯伙伴之间传送少量数据或中等数量的数据, 通过DP (分散设备)协议,PROFIBUS可与智能型现场设备通讯,这种通讯类型 具有快速、周期性传送数据的特点。工业以太网用于许多站之间长距离、大数据量的传送。下面详述在WINCC中建立和PLC通讯连接所必须的组态步骤。1、通讯驱动程序WINCC中的通讯通过使用各种通讯
16、驱动程序来完成,对于不同总线系统上不 同PLC的连接,会有相应的通讯驱动程序可用。将通讯驱动程序添加到WINCC资源管理器内的变量管理器中。具体做法是鼠 标右键单击变量管理器,从弹出式菜单中选择“添加新驱动程序”来完成该添加 过程。该动作将在对话框内显示计算机上安装的所有通讯驱动程序。通讯驱动程 序是具有.chn扩展名的文件,计算机上安装的通讯驱动程序位于WINCC安装文 件夹的BIN子文件夹内,每个通讯驱动程序只能被添加到变量管理器中一次,添 加通讯驱动程序的界面如图3-1所示。将通讯驱动程序添加到WINCC项目中之后,就会在WINCC资源管理器中列出 在变量管理器下与内部变量相邻的子条目。
17、2、通道单元变量管理器中的通讯驱动程序条目包含一些子条目,这就是通常所说的通讯 驱动程序的通道单元,每个通道单元构成一个确定的从属硬件驱动程序,PC通讯 模块的接口必须对通道单元寻址的通讯模块进行定义。在系统参数对话框中定义通讯模块。通过右键单击相应的通讯连接条目,从 弹出式菜单中选择“系统参数”来打开对话框,其操作如图3-2所示。通常,在此处打开的对话框中指定通道单元使用的模块,少数情况下,可能自E 5IMATIC57PROTOCOL 5UITEIndustria Ethernet田甲甲由田Industrial EthernetMPINamed Connection! 杳曲fFl PROFI
18、B疔莊贴迪TCP/IP新建驰动程序连接勉”来打开对话框需要指定附加的通讯参数。3、连接通道单元要读写PLC的过程值,必须建立与该PLC的连接。通过右键单击相应的通道单元条目,并从弹出式菜单中选择“新建驱动程序连接”来建立WINCC 与PLC之间的连接。4、WINCC 变量要获得PLC中的某个数据,必须组态WINCC变量,相对于没有过程驱动程序 连接的内部变量,我们称这些变量为外部变量。要创建新的WINCC变量,可通过右键单击相应的条目,从弹出式菜单中选择 “新建变量”。在WINCC变量属性对话框中,可以定义不同的变量属性,其操作界面如图 3-3所示。图3-3新建变量在WINCC中建立了通讯连接
19、和WINCC变量之后,接下来重要的一步就是画面 组态了。用鼠标左键单击WINCC变量管理器窗口中的“图形编辑器”条目,再在右边 窗口空白处右键单击,选择“新建画面”条目,右边窗口就会出现新建的画面, 鼠标左键双击,进入图形编辑器。图形编辑器具有如下特点:带有工具和图形选项板的用户界面;A具有组态好的集成对象和图库;开放的图形导入方式;可动态提示画面组态; 通过脚本组态可链接附加的函数;可以与创建的图形对象链接。在图形编辑器中组态好画面,并把画面中的对象和WINCC变量相连接,保存 组态好的画面,进入WINCC资源管理器,点击即可进入运行环境。第三章下位机软件中的硬件配置和程序结构本套控制系统下
20、位机编程软件采用SIEMENS公司的下位编程软件STEP 7。1、STEP 7 简介STEP 7是用于SIMATIC S7-300/400站创建可编程逻辑控制程序的标准软件, 可使用梯形逻辑图、功能块图和语句表。它是SIEMENS SIMATIC工业软件的组成 部分。STEP 7以其强大的功能和灵活的编程方式广泛应用于工业控制系统,总 体说来,它有如下功能特性: 可通过选择SIMATIC工业软件中的软件产品进行扩展为功能摸板和通讯处理器赋参数值强制和多处理器模式全局数据通讯使用通讯功能块的事件驱动数据传送组态连接2、STEP 7的硬件配置和程序结构3、般来说,要在STEP 7中完成一个完整自动
21、控制项目的下位机程序设计,要 经过设计自动化任务解决方案、生成项目、组态硬件,生成程序、传送程序到 CPU并调试等步骤,其结构流程图如图2-1所示。选择r、选择2图2-1程序设计结构流程图从其流程图来看,设计自动化任务解决方案是首要的,它是根据实际项目的要求进行设计,本实验指导书对此不做过多地阐述。在生成项目和传送程序到 CPU并调试步骤之间,有先组态硬件后生成程序和先生成程序后组态硬件两种方 案可供选择,两种方案本质都是一样的,设计者可根据具体情况和自己的习惯来 选择其中一种。下面,我们就选择第一种方案,从生成项目开始,逐步介绍如何 完成一个自动化控制项目的下位机程序设计。2.1生成项目1、
22、双击桌面上的“SIMATIC Manager”图标,则会启动STEP 7管理器及STEP 7新项目创建向导如图2-2所示。XJSTEP 7 Wizard: New ProjectE皱 Introduction1(4)STEP 7 Wizard: New ProjectYou can create STEP 1 projects quickly and easily using the STEP 7 Wizard. You can then start programming immediately.Click one of the following options:Next to creat
23、e your project step-by-stepFinish to create your project according to the preview.7 Display Wizard on starting the SIMATIC ManagerPreview I吩 S7 Fro1 三圖 SIMATIC 300 Station j匚FuaiaciTi S7 Program|T|BlocksBlock Name | Symbolic Name|口 0 B1Drcle Ewecution 寸Fjnish ICancelCFTTC r-j ?| . YrU 1 1 /SrHelp图2
24、2 STEP 7新项目创建向导2、按照向导界面提示,点击“NEXT”,选择好CUP型号,本示例选择的CPU 型号为CPU315-2DP,设置CPU的MPI地址为2,点击“NEXT”,在出现的界面中 选择好你所熟悉的编程语言(有梯形图、编程指令、流程图等可供选择),点击 “FINISH”,项目生成完毕,启动后STEP 7管理器界面如图2-3所示。SIMATIC Manager - S7_Prol (Component.驛 File Edit Insert PLC View Options Window Help-Ifflxl口|剧剽歸I紂輛皂I 曹邑-1 S7 Prol- 爾 SIMATIC 3
25、00 Station-CFU315-2DF (1)ST Pr o gr am t.l.) 蛮| CoriXLecti onE-21J ST Program (1) _DJ Som-c me BlocksPress Fl to get Help.图 2-3 STEP 7 管理器界面JnlProfi遛遛遛旦S-S-S-S-S-EI-2、TKd1 Hs.Module.FBOFIBUS-DP slaves for 图2kt、硬件配置 窗口 (,di s tr i but ed r ackj12Q CFU315-2DF (1)置窗口分为四部分,七卜亠方为为模块 f / 7 / 7 /_ 7,“架,左下方
26、为机架上2.2组态硬件硬件组态的主要工作是把控制系统的硬件在STEP 7管理器中进行相应地配 置,并在配置时对模块的参数进行设定。1、鼠标左键单击STEP 7管理器左边窗口中的“SIMATIC 300 S tat ion”项, 则右边窗口中会出现“ Hardware”和“ CPU315-2DP(1)”两个图标,双击图标 “Hardware”,打开硬件配置窗口如图2-4所示。gSHW Config - SIMATIC 300 Station (Configuration)-.Ojjticms Window Help -Igl13中 Station Edit Insert PLC View2d说明
27、和订货号。3、要配置一个新模块,首先要确定模块放置在机架上的什么地方,再在硬 件列表中找到相对应的模块,双击模块或者按住鼠标左键拖动模块到安放位置, 放好后,会自动弹出模块属性对话框,设置好模块的地址和其他参数即可。4、按照上面的步骤,逐一按照实际硬件排放顺序配置好所有的模块,编译 通过后,保存所配置的硬件。5、点击“开始设置控制面板”,鼠标左键双击控制面板中的“Set PG/PC Interface”图标,选择好你的PC机和CPU的通讯接口部件后点击“OK”按钮退 出。6、把控制系统的电源打开,把CPU置于STOP或者RUN-P状态,回到硬件配 置窗口,点击图标,下载血 配置好的硬件到CPU
28、中,把CPU置于RUN状态(如 果下载程序时CPU置于三(0) UR FRDFIBUS DFFROFIBUS-FA SIMATIC 300 SIMATIC 400SIMATIC FC Based Control 300/-4SIMATIC FC Station RUN-P状态,则可省略这一步),如果CPU的SF 灯不亮,亮的只有绿灯,表明硬件配置正确。7、如果CPU的SF灯亮,则表明配置出错,点击硬件配置窗口中图标,则配 J 置错的模块将有红色标记,反复修改出错模块参数,保存并下载到CPU,直到CPU的SF灯不亮,亮的只有绿灯为止。2.3程序结构配置好硬件之后,回到STEP 7管理器界面窗口,
29、鼠标左键单击窗口左边的 “Block”选项,则右边窗口中会出现“OB1 ”图标,“0B1”是系统的主程序循环 块,“OB1”里面可以写程序,也可以不写程序,根据需要确定。STEP 7中有很 多功能各异的块,分别描述如下:1、组织块(Oganization Block,简称0B)。组织块是操作系统和用户程序 间的接口,它被操作系统调用。组织块控制程序执行的循环和中断、PLC的启动、 发送错误报告等。你可以通过在组织块里编程来控制CPU的动作。2、功能函数块(Function Block,简称FB)。功能函数块为STEP 7系统函 数,每一个功能函数块完成一种特定的功能,你可以根据实际需要调用不同
30、的功 能函数块。3、函数(Function,简称FC)。函数是为了满足用户一种特定的功能需求而 由用户自己编写的子程序,函数编写好之后,用户可对它进行调用。4、数据块(Data Block,简称DB)。数据块是用户为了对系统数据进行存储 而开辟的数据存储区域。5、数据类型(DataType,简称UDT)。它是用户用来对系统数据定义类型的 功能模块。6、变量标签(Variable Table,简称VAT)。用户可以在变量标签中加入系 统变量,并对这些变量加上用户易懂的注释,方便用户编写程序或进行变量监视。如果你要加入某种块,可在右边窗口(即出现“OB1”的窗口)空白处单击 鼠标右键选择“ Ins
31、ert New Objec t”选项,在其下拉菜单中鼠标左键单击你所 要的块即可。添加好了你所要的块之后就是程序编写了,鼠标左键双击你所要编写程序的 块即可编写程序了(编写程序的指令和语法可参考SIEMENS A&D网站上的S7-300 CPU 31xc指令表一书)。程序写好并编译通过之后点击STEP 7管理器界面窗口中的嗣 图标,下 载到CPU中,把CPU置于RUN状态即可运行程序。第四章下水箱液位前馈反馈控制本实验的被控制量为下水箱的液位,主扰动量为变频器支路的流量。本实验 要求下水箱液位稳定至给定值,将压力传感器LT3检测到的下水箱液位信号作为 反馈信号,它与给定量比较后产生的差值为调节
32、器的输入,其输出控制电动调节 阀的开度,以达到控制下水箱液位的目的。而扰动量经过前馈补偿器后直接叠加 在调节器的输出,以抵消扰动对被控对象的影响。本实验系统的结构图和方框图 如图4-1所示。图4-1下水箱液位前馈-反馈控制系统(a)结构图(b)方框图由图可知,扰动F (s)得到全补偿的条件为F(s)G (s)+F(s)G (s)G (s)=0fF0/、 G (s)/ 、G (s)=- f(4-1)FG (s)0上式给出的条件由于受到物理实现条件的限制,显然只能近似地得到满足, 即前馈控制不能全部消除扰动对被控制量的影响,但如果它能去掉扰动对被控制 量的大部分影响,则认为前馈控制已起到了应有的作
33、用。为使补偿器简单起见, G (s)用比例器来实现,如图其值按本章式(4-1)来计算。F静态放大系数K的整定方法。F1. 开环整定法开环整定法是在系统断开反馈回路的情况下,仅采用静态前馈作用,来克服 对被控参数影响的一种整定法。整定时,K由小到大缓慢调节,观察前馈补偿的F作用,直至被控参数基本回到给定值上,即实现完全补偿。此时的静态参数即为 最佳的整定参数值K,实际上K值符合下式关系,即FFKK = -f(4-2)F -0式中:K、K分别为扰动通道、控制通道的静态放大系数。f 0开环整定法适用于在系统中其他扰动不占主要地位的场合,不然有较大偏 差。2. 前馈-反馈整定法图4-2前馈-反馈系统参
34、数整定方框图在图4-2所示系统反馈回路整定好的基础上,先合上开关K,使系统为前馈 -反馈控制系统,然后由小到大调节K值,可得到在扰动f (t)作用下如图4-3F所示的一系列响应曲线,其中图4-3 (b)所示的曲线补偿效果最好。T *T *T 1(a)欠补偿(b)补偿合适(c)过补偿图4-3前馈-反馈系统卡的整定过程3. 利用反馈系统整定K值F待图7-2所示系统运行正常后,打开开关K,则系统成为反馈控制。1、待系统稳定运行,并使被控参数等于给定值时,记录相应的扰动量F和0 调节器输出u。02、人为改变前馈扰动,使F变为F,待系统进入稳态,且被控参数等于给0 1 定值时,记录此时调节器的输出值U。
35、13、按下式计算K值F(4-3)u uK 二 oF F F1 0实验控制系统流程图本实验控制系统流程图如图4-4所示。控制系统流程图图4-4实验控制系统流程图本实验主要涉及三路信号,其中两路为现场测量信号,它们分别是下水箱液 位和变频器支路的管道流量;另外一路是控制阀门定位器的控制信号。本实验中的变频器支路的管道流量信号是标准的模拟信号,与SIEMENS的模 拟量输入模块SM331相连,SM331和分布式I/O模块ET200M直接相连,ET200M 挂接到PROFIBUS-DP总线上,PROFIBUS-DP总线上挂接有控制器CPU315-2 DP (CPU315-2 DP为PROFIBUS-D
36、P总线上的DP主站),这样就完成了现场测量信号 向控制器CPU315-2 DP的传送。本实验中的执行机构(阀门定位器)和下水箱液位检测装置(压力变送器) 均为带PROFIBUS-PA通讯接口的部件,挂接在PROFIBUS-PA总线上,PROFIBUS-PA 总线通过LINK和COUPLER组成的DP链路与PROFIBUS-DP总线交换数据, PROFIBUS-DP总线上挂接有控制器 CPU315-2 DP,由于PROFIBUS-PA总线和 PROFIBUS-DP总线中信号传输是双向的,这样既完成了现场检测信号向CPU的传 送,又使得控制器CPU315-2 DP发出的控制信号经由PROFIBUS
37、-DP总线到达 PROFIBUS-PA总线来控制执行机构阀门定位器。实验内容与步骤本实验选择中水箱和下水箱串联作为被控对象,实验之前先将储水箱中贮足 水量,然后将阀门 Fl-1、Fl-2、Fl-7、F2-1、F2-4 全开,将阀门 Fl-10、F1-11 开至适当开度(阀F1-10F1-11),其余阀门都关闭。1、接通控制系统电源,打开用作上位监控的的PC机,进入的实验主界面。2、在实验主界面中选择本实验项即“下水箱液位前馈-反馈控制实验”系 统进入正常的测试状态,呈现的实验界面如图4-5所示。|褥 Win匸匸-Runtime3、在实验界面中点击“启动变频器”按钮启动变频器。并在变频器频率设
38、定输入框中给变频器一个适当的工作频率。4、合上三相电源空气开关,使磁力驱动泵上电打水。5、按单回路的整定方法整定调节器参数,并按整定的参数进行调节器设定。 按前面静态放大系数的整定方法整定前馈放大系数kf。F6、待液位稳定于给定值时,打开阀门F2-4或F2-5,给变频器设定较小频 率给中水箱(或下水箱)打水加干扰(要求扰动量为控制量的5%15%,干扰过 大可能造成水箱中水溢出),观察计算机记录下的水箱液位的响应过程曲线。7、将前馈补偿去掉,即构成双容液位定值控制系统,重复步骤6,用计算 机记录系统的响应曲线,比较该曲线与加前馈补偿的实验曲线有什么不同。第五章实验结果和分析实验图下水箱PI的前馈
39、-反馈控制11测:fr (PV)输出值(0P;变频器频至.用”用0發区D.003.00前馈系数Trnd in th* for Agro tiridl spl实验梳程实时曲践数据报表返冋主菜单十九.下水箱液位前馈反馈控制实验14.5%100500 0480 7459 8-43B9-4110397 V37& 2355l3:334 43135292B-271.7-25询229 9;209 0109 V1672146 312514104.5183662 7141.8-茨90012/14/10 2:51 00 RS 5?00PM53 00 E3 54 00 PM:55:00 讯弱 00 H0 57:00
40、 PI458 00 讯 5000 P00 00 PM设定值SV)下水箱PI的前馈-反馈控制实验十九5下水箱液位前馈反馈控制实验11变频器期至.1:3S:Q0 PRI4Q 00 PI 41:00 PM 42 00 PW 43t00 PM 44- 00 PM 45:00 P豔0&QQ 用 47:Q0 PMt48 00 刊20.90012/14/10100 itirTi500 0490 7459 843B9397137EL2 355l3334 43135292E271.7250 6229 920SD1S&1167J146 31254104 53 6设定值(SV)Trfln.d in th forAg
41、rotindl spl实验流程I输出值(OP)13.0死区0.00前馈系数姿时血我l 散据报丢I逅冋上菓单下水箱PI的前馈-反馈控制实验十九、下水箱液位前馈-反馈控制实验设定值SV)变坝器频至.459 843B941 ao355.3334 43135292 E271722993090143397137B2104 563 Sieai1B72100 mm0 012/14/10 1:56 00 FH 57 00 PM:5e 00 PH 5&00 PM:0000 Fig 01 00 P 厝陰 00 Ptt 03 00 Ptt 04;00 P 05 00 PM定整数参30%IriTQnd in th*
42、fw a ground spL实验流程11实时曲线1数据报表1逅回主菓单下水箱PID的前馈-反馈控制实验十九、下水箱液位前馈-反45SLB1438 9柚0soao:4807旦测呈值(PV)输出值(OP)变频器频率.0死区0.003.00前馈系数Trn.d in th for a graundl30比裟用397.137E235533135232 EH2717250 82090125.4104 5ie&i167.2209彳00 J12/14/1021800 PiaiSOO PQ:20 00 FW 21:00 叩:22:QQ 刑 23tOQP 址斟:Q0 FT3 2 5 00 Pit: 26 00
43、HS 27 00 PM1100 mr100 mm H 0.0%设定值(SV)实验流程1实时曲线1数据报表返口主菜单下水箱PID的前馈-反馈控制Trand in th for a ground spl设定值(SV)100比例度代)积猪间微帶间输出上限输岀下限定整数参测星憤(PV)变坝器频亜.0.0rnrr变坝器频亜.0.01100 mrT1.Q20000.020000.0200 000.00输出值(OP;比鍍用比裟;用死区前馈系数0.00实验菰程实时曲线数据报表返回主菜单下水箱PID的前馈-反馈控制分析通过上位机改变不同的参数得到了上面的6个下水箱液位前馈反馈控制的 历史曲线图。在前馈系数不变的
44、情况下我们可以看出改变P,I,D三个参数可以让我们获 得不同的历史曲线。其中参数不变的有设定值和变频器频率的数值分别设为 100mm和30%。输出上限和输出下限分别为200.00和0.00。死区时间不设定。 下面从PI和PID分别控制来说明控制的效果。PI的下水箱液位前馈-反馈控制:首先关闭微分作用也就是PID当中的D这 个参数让它对系统无影响。按照对一般的系统测试我们先设定比例值(P)通常 为0.3-10.0,积分值(I)越大越好,通过不断的调整比例值和积分值就可以达 到很好的响应曲线,是系统更快更稳的达到设定值。前三幅图片即为PI控制的 下水箱液位前馈-反馈控制。我们可以看出比例值(P)越
45、大,系统达到稳定的时 间就越短,反之则时间越长,但是比例值(P)太大也会引起系统的严重超调进 而导致系统不能达到预期效果。积分值(I)的作用是使系统无偏差即消除系统 的残差是系统达到预期效果。积分时间要根据不同的系统来决定,对于液位控制 当然是越大越好,这样效果很好,但是时间会很长,综上所述我们可以选择一个 适当的比例值(P)和积分值(I)是系统完全满足我们的需要。PID的下水箱液位前馈-反馈控制:和PI控制一样先设定比例值(P)为 0.310.0之间的一个适当值,积分值(I)越大越好,微分值(D)也是越大越 好,通过不断的修改这3个值我们就能得到我们想要的曲线达到预期的效果。与 PI控制不同
46、的是这里有一个微分时间(D),它的作用是减小超调,因为如果超 调量太大的话会产生不能预知的不良反应,对系统有很大的影响。所以微分时间 的选择也是有要求的,通过对后三幅图的研究可以看出微分时间也应该选择比较 大的数值,但它是以牺牲系统能达到稳定的时间为代价的。因此我们要根据工程 的需要来确定它的数值。接下来我们来研究前馈系数对系统的影响,我们加上前馈系数是因为要让系 统更快的达到稳定。我们通常使用的反馈控制对于变化幅度较大而且十分频繁的 负荷扰动往往是不能满足要求的。而前馈控制却能把影响过程的主要扰动因素预 先测量出来,再根据对象的平衡条件,计算出适应该扰动的调节量然后进行控制。前馈控制与反馈控
47、制之间存在着一个根本的差别,即前馈控制是开环控制而 不是闭环控制,它的控制效果将不能通过反馈来加以检验;而而反馈控制是闭环 控制,它的控制效果却能通过反馈加以检验。我们还可以看出加了前馈的系统是快的,有智能的和敏感的,但是它是不准 确的;反馈是慢的但是准确的,而且在负荷条件不明的情况下还有控制能力。这 2个回路的相互补充,相互适应构成了一种十分有效的控制方案。在实践中,前馈-反馈控制系统正越来越多的得到了采用,而且收到了十分显著的效果,我们这次的实验也很好的证明了前馈-反馈系统是有效的。结束语下水箱前馈-反馈控制是关于过程控制系统的学习,是对所学课程的深入研 究。通过动手练习,将理论与实际生产
48、实际联系起来,让知识从书本中解放出来。这次课程设计,让我们多了一次接近生产实习的机会。通过一步步的思考、 设计、操作、验证等步骤,让我们对PLC、Step7、WinCC等过程控制的软硬件 有了更加充分的理解和掌握。同时,这个过程也离不开老师的辛勤指教和同学们 的热情帮助。这种对于实际工程的了解和认识,对于我们即将毕业的大学生来说 是多么珍贵的经验和财富。我非常感谢能有这次课设的机会,同时感谢帮助我的 同学和老师们。参考文献【1】.金以慧.过程控制.北京:清华大学出版社,1993【2】.蒋慰孙.俞金寿.过程控制工程电子工业出版社,1988【3】.孙洪程李大字翁维勤.过程控制工程高等教育出版社,2006【4】.潘立登.过程控制.机械工业出版社,2008【5】.崔坚西门子S7可编程控制器.机械工业出版社,2007【6】.西门子(中国)有限公司自动化与驱动集团深入浅出西门子自动化产 品系列丛书.北京航天航空大学出版社,2004
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
