 大气数据与惯导系统
大气数据与惯导系统

《大气数据与惯导系统》由会员分享,可在线阅读,更多相关《大气数据与惯导系统(20页珍藏版)》请在装配图网上搜索。
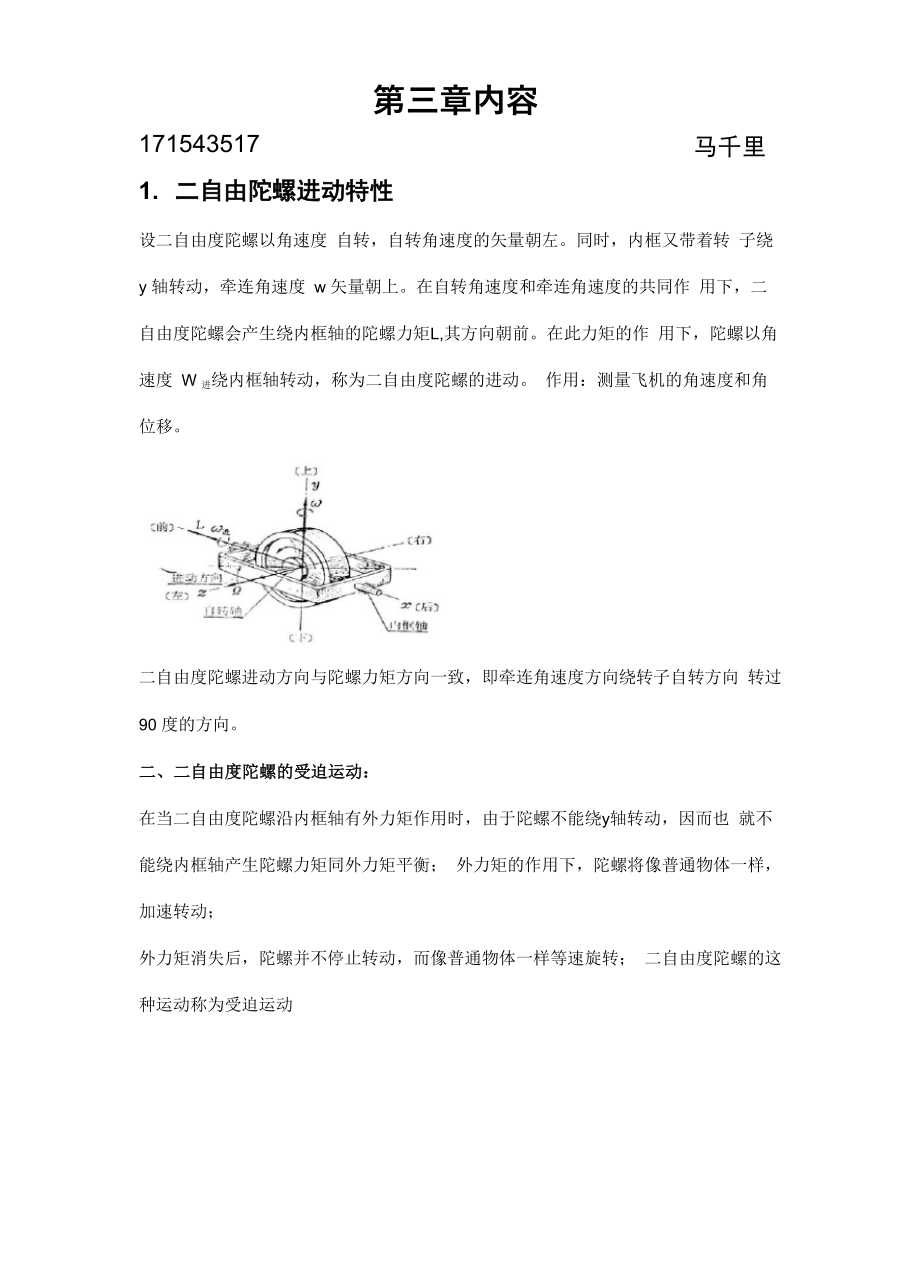
1、第三章内容马千里1715435171. 二自由陀螺进动特性设二自由度陀螺以角速度 自转,自转角速度的矢量朝左。同时,内框又带着转 子绕 y 轴转动,牵连角速度 w 矢量朝上。在自转角速度和牵连角速度的共同作 用下,二自由度陀螺会产生绕内框轴的陀螺力矩L,其方向朝前。在此力矩的作 用下,陀螺以角速度 W 进绕内框轴转动,称为二自由度陀螺的进动。 作用:测量飞机的角速度和角位移。二自由度陀螺进动方向与陀螺力矩方向一致,即牵连角速度方向绕转子自转方向 转过90 度的方向。二、二自由度陀螺的受迫运动:在当二自由度陀螺沿内框轴有外力矩作用时,由于陀螺不能绕y轴转动,因而也 就不能绕内框轴产生陀螺力矩同外
2、力矩平衡; 外力矩的作用下,陀螺将像普通物体一样,加速转动;外力矩消失后,陀螺并不停止转动,而像普通物体一样等速旋转; 二自由度陀螺的这种运动称为受迫运动二自由度陀螺进动与三自由度陀螺进动的区别: 三自由度陀螺在常值外力矩作用下是等速度进动;二自由度陀螺在常值牵连角 速度作用下是加速进动。 三自由度陀螺在外力矩消失后立即停止运动;二自由度陀螺在牵连角速度消失 后维持等角速度进动。二自由度陀螺没有稳定性:二自由度陀螺只有两个自由度,当它受到绕内框轴的冲量矩作用时,不能像三 自由度陀螺那样绕外框旋转(没有外框轴),因而不能借助于陀螺力矩,使陀螺 绕内、外框轴的转动互相影响,形成章动,保持转子轴大方
3、向。当基座绕 y 轴转动时,由于陀螺力矩使陀螺绕内环轴进动,转子轴方位就要改 变,不能保持原来的方位。2. 速度陀螺的基本原理 速度陀螺仪:利用二自由度陀螺测量飞机(或其他航行器)角速度的仪表,称为 二自由度速度陀螺仪,常简称速度陀螺仪。它是飞机上的重要仪表之一。1、组成及作用速度陀螺仪由一自由度陀螺、平衡弹簧和阻尼器等部分组成。一自由度陀螺的Y轴与内框轴和自转轴均垂直,是速度陀螺仪的输入轴,仪表可以测出绕该轴的角 速度E行方向阻尼兴B- 测量轴二自由度陀螺:当飞机转弯时,产生陀螺力矩。 平衡弹簧:产生弹性力矩以平衡陀螺力矩。 阻尼器:用以产生与内框旋转角速度成正比的阻尼力矩,使内框的摆动迅速
4、衰减, 当内框停止转动时,阻尼力矩消失。它只是改善了速度陀螺仪工作的稳定性,对 内框稳定的最终位置并没有影响。2、基本原理设二自由度陀螺以角速度自转,当飞机有绕测量轴的角速度(W)时, 沿内框轴方向便会出现陀螺力矩(L)。在陀螺力矩的作用下,陀螺转子及内框将 绕内框轴转动,从而使平衡弹簧变形,产生与内框转角成正比的弹性力矩(M弹)。 弹性力矩的方向与陀螺力矩的方向相反,当弹簧力矩与陀螺力矩平衡时,内框停 止转动,内框相对初始位置转过的角度,便可表示飞机角速度的大小。3. 速度陀螺运动和转角公式根据陀螺仪技术方程,取x轴(即内环轴)方程为:J + H = Mx x y x3_p;xxc3 =3
5、cos B-3 sin 卩;yyczcM = K P+KP+Mx D By o YyLcz内环坐标系与机体坐标系的位置Z co 0cox代入坐标系的各个参量并整理得:J B+ K B+ K B= H (3 cos P-3 sin B) + J 3 - Mx D yc zc X xc B2、转角公式如果干扰输入(不属于被测量的输入,Wzc, Wxc和Mb)为零,而且卩很小可 以获得二自由度速度陀螺仪的理想特性为:J P+ K P + K P = H 3 cos P H 3x D yc ycHp = p=0P =K3在稳态时 = = 0.,则 K ycP即,输出角3与输入角速度yc成正比,比例系数
6、为K,称为速度陀螺仪的灵 敏度。1. 转弯仪的结构与工作原理转弯仪:一种速度陀螺仪。其作用: 用来指示飞机转弯的方向,并粗略指示飞机转弯的角速度。 指示飞机在某一飞行速度下无侧滑转弯时的倾斜角。转弯侧滑仪的组成:二自由度陀螺、平衡弹簧、空气阻尼器、指示部分(刻度盘、Q扌辭十拨杆传送机构方问!阿駅轴2、二自由度陀螺各轴在飞机上的安装位置拨杆传送机构等)。当飞机没有转弯角速度、内环处于初始位置时,陀螺自转轴与飞机横轴平行,自 转角速度矢量指向左机翼;内框轴与飞机纵轴平行,测量轴与飞机立轴平行 3、基本原理 转弯仪怎样指示飞机的转弯方向 当飞机直线飞行时,没有陀螺力矩的作用,内框在平衡弹簧的作用下,
7、稳定在初 始位置,指针停在刻度盘的中央,表示飞机没有转弯; 当飞机左转弯时,转弯角速度矢量朝上,因而产生指向机头的陀螺力矩,内框向 右旋转,直到陀螺力矩与弹性力矩平衡为止。内框的转角通过拨杆传送机构传给 指针,使指针方向偏向左方,表示飞机正在向左转弯; 当飞机向右转弯时,转弯角速度矢量朝下,因而产生指向机尾的陀螺力矩,内框 向左旋转,带动指针向右偏离初始位置,表示飞机正在向右转弯。 飞机绕横轴或纵轴转动时,转弯仪为什么不指示? 当飞机绕横轴转动时,其角速度矢量与陀螺自转角速度矢量正好一致(或相反),不会产生沿内框轴方向的陀螺力矩,故仪表不指示;当飞机绕纵轴转动时,在内框平衡弹簧的作用下,被迫随
8、表壳一起转动,内框平 面与表壳的相对位置保持不变。这时,虽然有沿测量轴方向的陀螺力矩,但由于 陀螺没有绕测量轴转动的自由度,故仪表也不会指示。二、转弯仪的内框转角公式a = 丫 _ Bk B = H ocosak B = Hocos (y - B )=H o (cos B cosy + sin B siny)Bsin B Q B cos B Q1当 B 较小时:k B = H o(cosy + B siny)HocosyB =K 一 H osiny转弯仪为什么可以指示飞机在某一飞行速度下作无侧滑转弯时的倾斜角?飞机作无侧滑转弯左)时.箭斜 角同惯性离心力和重力的去系F = G tgy惯F =
9、mV o离F = F惯 离所以mV o = G * tgytgy = mV o / mg = V o / go = g * tgy / V而: p =Hco(y - P)K邹较小时有:P =日册旳gHsinyVK所以转弯仪可以测量飞机在某一速度下作无侧滑转弯飞行时的倾斜角侧滑仪:用来指示飞机转弯时有无侧滑及侧滑的方向。 飞机转弯时发生侧滑的原因飞机转弯时破坏横向力平衡,飞机就可能产生侧滑。剩余侧力为 0,飞机无侧滑; 剩余侧力向外,飞机外侧滑;剩余侧力向内,飞机内侧滑。 测量飞机侧滑的基本原理在飞机上安装一单摆,摆锤的受力情况与飞机的受力情况一样,所以摆锤的运动 情况和飞机的侧滑情况一样,通过
10、测量摆锤的运动情况就可以测量飞机的侧滑情 况。2、侧滑仪的工作原理 侧滑仪的敏感部分是一个小球,小球可在弯曲的玻璃管中自由滚动。 玻璃管内装有透明的阻尼液(如甲苯),对小球的运动起阻尼作用。 玻璃管的一端有很小的膨胀室,以便阻尼液因温度升高而容积增大时占用。 当飞机平飞时,小球受重力作用,停在管子中央; 当飞机进行无侧滑转弯时,作用在小球上的侧力为零,小球也处在玻璃管中央当飞机转弯时的倾斜角过小或转弯角速度过大,则在剩余侧力作用下,飞机要发生外侧滑,小球沿着剩余侧力的方向偏离玻璃管中央。总结:在飞机转弯时,剩余侧力为零,小球停在玻璃管中央,表示无侧滑;剩余侧力大于零,小球偏向玻璃管外侧,表示外
11、侧滑;剩余侧力小于零,小球偏向玻璃管内侧,表示内侧滑。略%,小球欲向右例)运动图Z13外側滑时側滑仪的指示玻璃管 阻尼液(b)无侧滑转弯3、侧滑仪和转弯仪在飞行过程中的配合指示 飞机平飞时,转弯侧滑仪的指针和小球都停在中央位置,表示飞机平飞。在盘旋过程中若飞机的倾斜角适当,指针便指在刻度盘的左边,小球处在玻璃管 中央,表示飞机左盘旋,无侧滑。若倾斜角偏小,飞机就会沿着箭头所示的方向 进入外侧滑。此时,指针指在左边,小球偏在玻璃管的右侧。 相反,若倾斜角偏大,飞机就会沿着箭头所指的方向进入内侧滑,此时指针指在 左边,小球偏在玻璃管的左侧3.转弯仪性能指标转弯仪的性能分析 灵敏性:是转弯仪反应飞机
12、转弯角速度的明显程度和快慢程度的特性,主要有灵 敏度和非灵敏区两个指标。准确性:是转弯仪测量飞机在正确转弯时的倾斜角准确程度的特性。 停滞性:是指飞机转弯角速度消失后指针回零能力的特性。稳定性:是指飞机转弯角速度突变时,指针迅速稳定的能力。4. 角速度计的结构与工作原理 角速度传感器主要用来测量飞机绕机体各轴的转动角速率,及俯仰角速率、倾斜 角速率和偏航角速率。这些角速率主要用于自动驾驶仪、偏航阻尼器、机载雷达系统的稳定和阻尼信息。 也有的角速度传感器可输出继电信号去控制地平仪、中心地垂陀螺仪(双轴稳定 平台)、航向陀螺仪、罗盘系统作转弯盘旋时误差修正。角速度传感器主要有比例式和继电式两种。一
13、、比例式角速度传感器1、定义: 是指输出信号的大小与被侧角速度大小成比例的角速度传感器。2、类型:分为一般结构和液浮结构(又分为全液浮和半液浮),液浮结构的陀螺 主要是为了减小轴承的支承力以减小内环轴的摩擦力矩,并得到所需的阻尼3、基本结构 二自由度陀螺仪(包括陀螺电动机、转子、陀螺房等):作用是产生陀螺力矩 定位弹簧(平衡弹簧):作用是产生弹性力矩。 阻尼器:阻尼陀螺仪绕内环轴的振荡(种类有空气、液体等)。 信号传感器:把输出转角变换成成比例的电信号,通常采用电位器或微动传感器。“零”位调整机构:使传感器在被测角速度为“0”时,输出为“0”。冉I Jii翱t:關汕1EU 甘低EEF三百TH贬
14、耳它翊心一艇古古构 曲:川圭 冼陀娴仪匕艸 n- = . 1 r(jfeq羽飞町浮子式測廖陀嫌位JIXR1!结期EJ 2-15 連庫畑编仪古占旳4、技术性能比例式角速度传感器的技术性能一般规定工作条件、角速度的测量范围、灵敏度、 零位输出最大电压、输出特性的线性度、传感器的固有频率等。5、安装方位飞机上一般装有三个角速度传感器(装惯性导航系统的飞机除外)。原则是保证 各陀螺的敏感轴与飞机相应轴平行,这三个传感器一般也同装于一个仪表壳中二、继电式速度陀螺传感器1、定义:是指当被测角速度为某一规定值时,速度陀螺仪输出一个常值信号。2、基本结构:由角速度陀螺仪、延时机构和控制部分组成。 角速度陀螺仪
15、:由二自由度陀螺、平衡弹簧、阻尼器和接触电门组成。 延时机构: 由二相感应电动机、减速器、环形电位计(又称回输电位计)和 环形控制电门等组成。 控制部分3、传感器的工作原理角速度的测量: 飞机的角速度由二自由度速度陀螺仪来感受和测量。当飞机直线飞行时,速度陀螺仪的内框处于初始位置,固定在内框上的电刷处于 接触电门接触片的中央绝缘部分,接触电门没有信号输出,延时机构不工作,控 制机构也不工作。当飞机的转弯角速度大于某一数值(一般为0.1-0.3 度/秒)时,内框上的电刷便根据陀螺力矩的方向转到接触片相应的导电部分。接通了控制电动机的控制绕组 使延时机构和控制电门工作。当飞机角速度小于 0.1-0
16、.3 度/秒时,陀螺内框的转角减小到使电刷脱开左或右导 电部分,与中间绝缘部分接触,断开延时机构的电动机控制绕组电路 延时机构的工作: 主要是把陀螺输出的电信号延迟 5-15”后再输到控制电门 原因是二自由度陀螺比较灵敏,有时飞机受外界干扰摆动和颠簸时,二自由度陀 螺就能感受出来,接触电门就可能接通。为了防止这种情况发生,二自由度陀螺 输出的信号要经过一套延时机构再去控制有关设备。3、传感器的工作原理 当飞机没有转弯时,电动机的控制绕组电路不通,没有电流,电动机不转,环形 控制电门处于断开位置,继电器线圈中无电流,控制电路不发生转换。当飞机转弯并且角速度大于0.1-0.3 度/秒时,二自由度陀
17、螺内框轴进动使接触电 门向左或向右接通了二相电动机的控制绕组,电动机开始转动经减速器带动回输 电位计电刷和控制电门的圆盘一起转动。当飞机停止转弯后,陀螺力矩消失,在恢复弹簧作用下,二自由度陀螺带着电刷 回到中立位置,接触电门断开控制绕组电路,电动机中只剩回输绕组力矩,电动 机反转,经2-10 秒后,所控制电路恢复原状。航空地平仪-工作原理1、飞机姿态角的定义飞机的俯仰角是飞机纵轴与地平面之间的夹角,飞机的倾斜角是飞机绕纵轴的转 角。垂直于地平面的线叫地垂线,因此模拟水平面也可以说是模拟一条当地地垂 线。2、地平仪的功能飞机中指示机身俯仰和倾侧状态的仪表。对保证飞机飞行安全具有极重要的作用3、地
18、平仪的基本组成基本组成:三自由度陀螺、摆式修正器、指示部分和控制机构三自由度陀螺的作用:稳定性好,但不能敏感地垂线 单摆的作用能敏感地垂线,但稳定性不好它们的配合使用:正常情况,用单摆实时对三自由度陀螺进行修正;机动飞行时,用三自由度陀螺的稳定性,将转子的自转轴稳定在地垂线方向。 指示机构: 缩影小飞机,俯仰刻度盘,倾斜刻度盘和人工地平线(指标) 控制机构:摆的控制机构:机动飞行中切断摆对陀螺的修正。陀螺的控制机构:上锁机构、随动框架、监控和故障指示、指示控制等。4、地平仪修正系统分类及工作特性1、修正系统的组成:敏感元件(摆)、力矩器(力矩马达、作动线圈 等)2、敏感元件:液体摆、水银摆、固
19、体摆水银摆(常值式)a、输出:大小-和偏转角大小无关正负-由偏转方向决定b、水银摆由直壁玻璃管、电极和水银珠组成。当玻璃管处于水平位置时,即偏角 为零,水银柱位于图示位置。此时电极 1 和2 以及 1 和 3 间都不导通,力矩器(如力矩马达)没有力矩产生。当出现偏角时,水银珠便立即跑到左端或右端,此时便有常值的信号电流通到力矩马达,马达产 生不变的修正力矩水银珠/SS 00* i 丨M 修正力矩=鳥-Mk、滚珠式(钢珠)(比例式)由滚珠、磁铁、涡流盘、转动架等组成。陀螺自转后,永久磁铁随转子转动,涡流环切割磁力线,产生转动力矩,带动转动架拨动滚珠在圆盘的槽内滚动,利用滚珠相对转轴形成的力矩作为
20、修正力矩。3-8谡球修正原理、滚珠式(钢珠)(比例式)a、输出与e角成比例的电信号修正力矩二k 、液体摆(复合式):也称液体开关。a、工作原理:利用导电液与接触点(导体)接触的面积改变时,导电液与接触 点形成的电路电阻就改变。当输入角位移为零,导电液与左右两接触点的接触面积相等,左右两路电阻相等。 当输出角位移不为零,导电液与左边或右边的接触面积增大,另一边减少,电阻 值随角位移改变。当角位移达到30度时,导电液与其中一边的接触面积不再改变,电阻保持常值。五极点式修正力矩=qc、修正力矩M =-kO (10 |0pp-M 0 0ppb、三极点式、液体摆(复合式)(忖三极点鞭体开关SV9液掉开关
21、结构陀螺室中心电极a后五騷点液休开关结构3、力矩产生器:修正线圈筒,修正电动机(力矩马达),钢珠修正器 等。修正线圈筒b、原理:当两个线圈通过的电流相等时,两个线圈产生的磁场相等,使铁心停在线圈筒的中央,则铁心的重量相对对称轴线不产生力矩。当线圈中通过的电流不等时,如III,则左边丨线圈产生的磁场大于右边II线圈产生的磁场,于是活动铁心被左边线圈吸引过来,铁心重力相对对称轴线产生力矩。力矩马达(也称修正电机)a、组成:转子、定子(两相感应电动机)两组控制线圈、一组激磁线圈。b、原理:与交流感应异步电机相同,不同点只是这种电机不是工作在高速转动 状态,而是工作在静止状态以输出力矩为目的。它有两组
22、控制线圈,一组激磁线 圈。输出力矩方向取决于哪一组控制线圈中的电流大。为修正系统的安装:以液体摆和修正电机组成的修正系统例地平仪通电后,若转子轴没有到达地垂线,则液体摆也不平。如陀螺向左倾斜, 液体摆向左倾斜,液体向左,而气泡向右,中间连接点和左边一个接点被导电液 覆盖的面积就大,电阻减小,右边接点和中间接点间的电阻则增大。横向修正电 动机两个控制绕组中的电流不等,修正电动机则产生力矩,此力矩加到陀螺外环 轴上,方向向右,陀螺按进动规律,使转子轴向右进动,直至地垂线位置。5、地平仪的安装方式与测量1、飞机俯仰角、倾斜角的两种角度定义:定义:真实俯仰角:飞机纵轴与地平面的夹角;真实倾斜角:飞机绕纵轴转过的角度。非真实俯仰角:飞机绕横轴转过的角度;非真实倾斜角:飞机横轴与地平面的夹角真实与非真实的关系:没有倾斜:真实俯仰角=非真实俯仰角;没有俯仰:真实倾斜角=非真实倾斜角飞机倾斜:真实俯仰角非真实俯仰角飞机俯仰:真实倾斜角非真实倾斜角TT纵向安装:则量它们时,使陀螺外框轴与飞机纵轴平行S3-16熹实俯仰廊和 奠真倾斜角的测鼻2、真实俯仰角和真实倾斜角的测量:3、非真实俯仰角和非真实倾斜角的测量:横向 安装 : 测 量它 们 时, 使陀螺外框轴 与 飞机横轴 平行
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
