 可编程逻辑控制器PLC通用课件4
可编程逻辑控制器PLC通用课件4

《可编程逻辑控制器PLC通用课件4》由会员分享,可在线阅读,更多相关《可编程逻辑控制器PLC通用课件4(67页珍藏版)》请在装配图网上搜索。
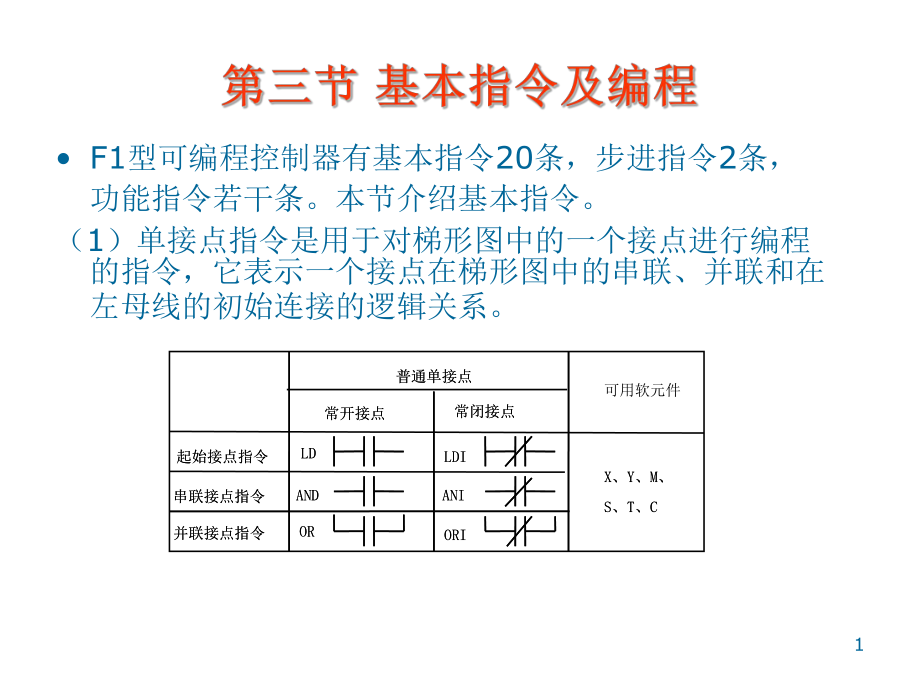
1、1 F1型可编程控制器有基本指令20条,步进指令2条,功能指令若干条。本节介绍基本指令。(1)单接点指令是用于对梯形图中的一个接点进行编程的指令,它表示一个接点在梯形图中的串联、并联和在左母线的初始连接的逻辑关系。起始接点指令串联接点指令并联接点指令常开接点常闭接点LDLDI ORORIANDANIX、Y、M、S、T、C普通单接点起始接点指令串联接点指令并联接点指令常开接点常闭接点LDLDI ORORIANDANI可用软元件X、Y、M、S、T、C普通单接点2 普通单接点指令有:LD、LDI、OR、ORI、AND、ANI。普通单接点指令的使用并联输出 连续输出 X410X411X412X413X
2、414X415X416X417X410X411Y430Y431Y432Y433LDLDIORORIANDANDANDANIANIORORLDLDIORORIANDANDANDANIANIOUT OUT OUTOUT X410X411X412X413X414X415X416X417X410X411012345678910111213(a)梯形图(b)指令表Y432Y431Y430Y433程序步 指令 软元件3 设PLC内逻辑运算器用符号A表示 LD 将常开接点的逻辑值装入A。通为“1”,断为“0”。LDI 将常闭接将常闭接点的逻辑值装入A。OUT 将运算结果赋给指定线圈。OUT指令后出现LD或L
3、DI,A的值将被LD、LDI所刷新。OUT 可连续使用,即可将A的值赋给不同的线圈,形成线圈并联。X400Y Y4 43 30 0M M1 10 00 0Y Y4 43 30 0地地址址 指指令令 编编号号梯梯形形图图0 0 L LD D X X4 40 00 0 1 1 O OU UT T Y Y4 43 30 02 2 L LD DI I Y Y4 43 30 03 3 O OU UT T M M1 10 00 0 助助记记符符指指令令格格式式逻逻辑辑运运算算器器A AX X4 40 00 0Y Y4 43 30 0X X4 40 00 0 ,A A=X X4 40 00 0A A/Y Y
4、4 43 30 0M M1 10 00 0=/Y Y4 43 30 0 ,A A=/Y Y4 43 30 0M M1 10 01 14 4O OU UT T M M1 10 01 1M M1 10 01 1=/Y Y4 43 30 0 ,A A=/Y Y4 43 30 0;4AND 指令“与”,取后跟标号值和A进行“与”运算。用于串联常开接点。ANI 指令“与非”,取后跟标号值的非和A进行“与”运算。用于串联常闭接点。OR 指令“或”,取后跟标号值和A进行“或”运算。用于并联单个单个常开接点。ORI 指令“或非”,取后跟标号值的非和A进行“或”运算。用于并联单个单个常闭接点。X402M101X
5、400Y430X401M100Y433M100Y431Y434X405Y433ANDANIORORI0 LD X4021 AND M1012 OUT Y4333 LD X4004 ANI Y4305 OUT M1006 LDI X401 7 OR M1008 OUT Y4319 LD X40510 ORI Y43311 OUT Y434;常开的串联;常闭的串联;常开的并联;常闭的并联5M103Y435X407X410M103M110AND、ANI、OR、ORI指令的混合使用0 LD Y4351 AND X4072 OR M1033 ANI X4104 OR M1105 OUT M1036 一个
6、线圈后面又通过单接点连接线圈输出称为连续输出 连续输出与非连续输出电路X410X411Y432Y433ANDX410X411Y432Y433X412X410X411Y432Y433M100S602ANDANDY432(a)连续输出电路(b)非单接点电路1(c)非单接点电路27A AN NB BX X4 40 00 0X X4 40 01 1X X4 40 02 2X X4 40 03 3X X4 40 04 4X X4 40 05 5Y Y4 43 36 6X X4 40 00 0X X4 40 01 1X X4 40 02 2X X4 40 03 3X X4 40 04 4X X4 40 0
7、5 5X X4 40 06 6Y Y4 43 30 0X X4 41 10 0X X4 40 00 0X X4 40 01 1X X4 40 02 2X X4 40 03 3X X4 40 04 4X X4 40 05 5X X4 40 06 6Y Y4 43 37 7O OR RB BO OR RB BO OR RB BO OR RB BA AN NB B0 0 L LD D X X4 40 00 01 1 A AN ND D X X4 40 01 12 2 L LD D X X4 40 02 23 3 A AN ND D X X4 40 03 34 4 O OR RB B 5 5 L LD
8、 DI I X X4 40 04 46 6 A AN ND D X X4 40 05 57 7 O OR RB B8 8 O OU UT T Y Y4 43 36 69 9 L LD D X X4 40 00 02 20 0 L LD D X X4 40 00 02 21 1 A AN ND D X X4 40 01 12 22 2 L LD D X X4 40 02 22 23 3 A AN NI I X X4 40 03 32 24 4 O OR RB B2 25 5 L LD DI I X X4 40 04 42 26 6 A AN ND D X X4 40 05 52 27 7 O O
9、R R X X4 40 06 62 28 8 A AN NB B2 29 9 O OU UT T Y Y4 43 37 71 10 0 O OR R X X4 40 01 11 11 1 L LD D X X4 40 02 21 12 2 A AN ND D X X4 40 03 31 13 3 L LD DI I X X4 40 04 41 14 4 A AN ND D X X4 40 05 51 15 5 O OR RB B1 16 6 O OR R X X4 40 06 61 17 7 A AN NB B1 18 8 O OR R X X4 41 10 01 19 9 O OU UT T
10、 Y Y4 43 30 0非非单单行行串串联联非非单单接接点点行行并并联联单单接接点点并并联联8X X4 40 00 0X X4 40 01 1X X4 40 02 2X X4 40 03 3X X4 40 04 4X X4 40 05 5Y Y4 43 36 6O OR RB BO OR RB BA A B B C C D D E E F F G G H H0 0 1 1 2 2 3 3 4 4 5 5 6 6 7 71 1字字节节 8 8个个逻逻辑辑运运算算器器非非单单接接点点行行并并联联 0逻辑运算器A取值A=X400 1与运算A=X400*X401 2没有没有OUT又出现又出现LD指令
11、指令,保持A不变,将X402值取入新逻辑运算器BB=X402 3对B与运算B=X402*X403 4ORB指令:A=A+B,B放弃A=X400*X401+X402*X403 5没有OUT再次出现LDI指令,保持A不变,将/X404赋给BB=/X404 6对B与运算B=/X404*X405 7ORB指令:A=A+B,B放弃A=X400*X401+X402*X403+/X404*X405 8OUT指令,将A赋给Y436,A放弃但A值未改变。Y436=X400*X401+X402*X403+/X404*X405 9LD指令,A被刷新=X400A=X400109 ANB指令的使用X400X401X40
12、2X403X404X405X406Y430Y431ANBANBANBX400X401X402X403X404X405Y430X407Y431X406X407LDLDLDLDOROROROROUTOUTX400X401X402X403X404X405X406X407Y430Y431ANBANBANB0123456789101112(a)ANB指令的应用(b)梯形图的一般画法(c)指令表1接点组接点组接点组X410X410ANDX41013LDLDLDLDOROROROROUTOUTX400X401X402X403X404X405X406X407Y430Y431ANBANBANB012345678
13、9101112(d)指令表2接点组接点组接点组ANDX4101310 也可以把一个单接点或多个单接点看成是接点组。单接点看成是接点组 M100M102M101M101M103LDOROUTANDM101M100M101M102ANBANIM103LDOROUTANDM101M100M101M102LDIM103接点组(b)2个单接点50123012344M100M102M101M101LDOROUT M101M100M101LDIM102LDOROUT M101M100M101M102ANBANI接点组(a)1个单接点012311SB1SB2SB3SQ1SQ2SQ3SQ4FRX400 X401
14、 X402 X403 X404 X405 X406 X407 COM可编程控制器Y430Y431KM1KM2KM2KM1FRCOM1FUL1N现场信号输入控制输出到现场 工作台自动往返的PLC控制I/O接线图同一电器仅需1常开信号输入12SB1FR34KM1KM2SB259SB376810KM2KM1SQ2SQ1SQ3SQ41112KM1KM2SB1FR34KM1KM2SB259SB376810KM2KM1SQ2SQ1SQ3SQ41112KM1KM2SB3SB21314SB3SB213142213X400X401Y430X404X407X402X403X405Y430X402Y431X403Y
15、431X401X404X406END自锁停保护换向Y431Y430互锁 工作台往返控制PLC程序梯形图 1M10 OUT Y430 块A0 LDI X4001 ANI X4072 LD X4013 OR Y4304 OR X4045 ANB6 ANI X402块B7 ANI X4038 ANI X4059 ANI Y431 M点直接代换、存在病程序A=/X400*/X407*(X401+Y430+X404)*/X402*X403*/X405*/Y43114X400X401Y430X404X407X402X403X405Y430X402Y431X403Y431X401X404X406END自锁停
16、保护换向Y431Y430互锁MX400X407重复使用10 OUT Y430 11 LDI X40012 ANI X40713 LD X40214 OR Y43115 OR X40316 ANB17 ANI X40118 ANI X40419 ANI X40620 ANI Y43021 OUT Y43122 END块A0 LDI X4001 ANI X4072 LD X4013 OR Y4304 OR X4045 ANB6 ANI X402块B7 ANI X4038 ANI X4059 ANI Y431 M点病句消除15X400X401Y430X404X407X402X403X405Y430X
17、402Y431X403Y431X401X404X406END自锁停保护换向Y431Y430互锁 工作台往返控制PLC程序梯形图 2X400 X407重复使用0 LD X4011 OR Y4302 OR X4043 ANI X4004 ANI X4075 ANI X4026 ANI X4037 ANI X4058 ANI Y4319 OUT Y430并联语句换位,程序指令减少16逻辑线圈指令用于梯形图中接点逻辑运算结果的输出或复位。各种逻辑线圈应和右母线连接,当右母线省略时逻辑线圈只能在梯形图的右边,注意输入继电器X不能作为逻辑线圈。逻辑线圈指令可用软元件OUTSETMCMCRRST普通线圈指令
18、置位线圈指令复位线圈指令主控线圈指令主控复位线圈指令SET M103RST M103MC M100MCR M101Y430Y、M、S、T、CY、M、S、T、C、DY、M、S、Y、M指令梯形图符号SET M103RST M103MCR M101Y430MC M10017普通线圈的指令为OUT,用于表示Y、M、S、T、C的线圈,是最常用的指令之一。例例 用一个按钮控制电动机的起动和停止,要求起动时按下按钮先预警5秒钟后电动机起动。停止时再按下按钮先预警5秒钟后电动机停止。单按钮预警起动和停止X401T450C060Y430Y431K50K1RSTT450C060Y430Y431T450C060Y4
19、30Y431T450C060Y430Y431T450T450C060Y430Y431C060012567811121415LDLDLDOROUTOUTOUTOUTANIANDX401X401K50K1RST起动预警预警(a)梯形图(b)指令表(c)时序图起动预警T45018 使用对象:M100M177。这里没有串联接点,可以编程可用普通编程的共用接点电路有串联接点,编程困难不能用普通编程的共用接点电路2613457819反复使用共用接点12134345786X400X401X402X403X404X405X406Y430Y431Y432Y433不能常规编程X407Y434 MC和MCR指令的使
20、用0 LD X4001 OUT M1002 MC M1002 MC M1003 LD X4014 OUT Y4305 LD X4026 OUT Y4317 AND X4038 OUT M1019 MC M1019 MC M101 10 LD X404 11 OUT Y432 12 LD X405 13 OR X406 14 OUT Y433 15 MCR M101 15 MCR M101 16 LD X407 17 OUT Y434 临时母线 2MCRM101X400M100M100X401X402X403Y430Y431M101Y432Y433M101X404X405X406X407Y434
21、临时母线 1ABABAB20 MC指令后连接的接点必须用指令后连接的接点必须用LD、LDI指令指令编程。主控程序块后必须用主控返回指令主控程序块后必须用主控返回指令MCR撤销临时母线。主控指令MC可嵌套,这时B前的M101常开要接起始母线。B所代表的临时母线起源于M101线圈前的接点X403处。不论使用了多少次MC,最后只用一条MCR指令返回起始母线。一个完整的主控程序由一个完整的主控程序由OUT、MC、和、和MCR三条指令组三条指令组合构成合构成。0 LDI X4001 ANI X4072 OUT M1002 OUT M1003 MC M1003 MC M1004 LD X40111 OUT
22、 Y430 10 ANI Y431 12 LD X40213 OR Y43114 OR X40315 ANI X40116 ANI X40417 ANI X40618 ANI Y43019 OUT Y43121 END5 OR Y4307 ANI X4028 ANI X4039 ANI X4056 OR X40420 MCR M10020 MCR M10021X400X401X407X402X403X405ENDY431Y430X404Y430X402Y431X403Y431X401X404X406自锁换向Y430互锁M100M100MCR M100SB1FR34KM1KM2SB259SB37
23、6810KM2KM1SQ2SQ1SQ3SQ41112KM1KM2SB3SB2131422置位线圈指令为SET,用于对Y、M和S线圈的置位。复位线圈指令为RST,用于对Y、M、S、T、C的线圈复位。应用对象M200M377、Y和S S M202RM202X401X402LD X401S M202 LD X402R M202 S/R 指令的使用方法一旦X401接通,M202即通电自锁,即使随后X401断开M202也不会释放。一旦X402接通,M202即释放,不管X402后来是否继续接通。23X401SETY430X400RSTY430X400X401Y430Y430(a)停止优先电路X401Y43
24、0X400Y430X400X401RSTY430SETY430()()(d)起动优先电路X401Y430X400X401Y430X400(b)复位优先电路(c)停止、复位优先时序图(e)置位优先电路(f)起动、置位优先时序图LDLDX401Y430X400RSTSETY430LDLDX401Y430X400RSTSETY43001230123指令表指令表SET、RST指令的应用24二分频电路(置位、复位指令)SETRSTRSTSETM100Y430X400Y430M100Y430M100Y430X400M100X400M100Y430梯形图及时序图25八个人进行智力竞赛抢答,编号分别为07#,
25、每个抢答台上放一个按钮和一个指示灯。主持人用一个按钮控制八个抢答台。当主持人报完题目后,按一下主持人按钮,抢答者才可按按钮,否则无效。抢答开始后,先按按钮者的灯亮,同时蜂鸣器响,并保持一直响,后按按钮者灯不亮。当主持人再按一下主持人按钮时,所有指示灯和蜂鸣器复位。智力竞赛抢答PLC接线图Y417Y430Y431Y432Y433Y434Y435Y436Y437COM1COM2COM4COMX400X401X402X403X404X405X406X407X410HL0HL1HL2HL3HL4HL5HL6HL7HA12VSB0SB1SB2SB3SB4SB5SB6SB7SB8主持人抢答人12V电源1#
26、2#3#4#0#5#6#7#1#2#3#0#4#5#6#7#抢答指示灯蜂鸣器26智力竞赛抢答梯形图X400X401X402X403X404X405X406X407SETSETSETSETSETSETSETSETY430Y431Y432Y433Y434Y435Y436Y437Y417X410ENDRSTY430 Y437抢答器梯形图开始信号蜂鸣器X410M100M100Y417Y430Y431Y432Y433Y434Y435Y436Y437MCRM100M10027它在输入信号上升沿接通一个T后断开。仅用于M和Y。P PL LS SM M1 10 03 3P PL LS SM M1 10 04
27、4S SM M2 20 05 5R RM M2 20 05 5X X4 40 01 1X X4 40 02 2M M1 10 03 3M M1 10 04 40 0 L LD D X X4 40 01 11 1 P PL LS S M M1 10 03 32 2 L LD D X X4 40 02 23 3 P PL LS S M M1 10 04 44 4 L LD D M M1 10 03 35 5 S S M M2 20 05 56 6 L LD D M M1 10 04 47 7 R R M M2 20 05 5X X4 40 01 1X X4 40 01 1X X4 40 02 2M
28、 M1 10 03 3M M1 10 03 3M M1 10 04 4M M2 20 05 5M M2 20 05 528用于对寄存器内容作移位操作。指令使用对象为:M100M360。共有12个,每个由16个辅助继电器构成,并以最小编号代表。移位顺序为从小向大。例如M100寄存器由M100M117构成,移位顺序为M100M101M117。SFT指令可用集中编程或分别编程法。一个完整的移位操作由三组指令完成,即数据输入、时钟输入和复位输入。输入接点接通时,“1”送入寄存器最低位,否则把“0”送入最低位。时钟输入端前接点每通、断一次,该寄存器的内容就由低向高移动一位。复位输入端接点接通时,寄存器的
29、内容全部被清“0”。IN、R、CP常可省略不标出。在F1系列中,移位寄存器最低位由数据输入端的接点状态决定,与移位时钟无关 29OUTSFTRSTM100X400X401X402INCPR0 LD X4001 OUT M1002 LD X4013 SFT M1004 LD X4025 RST M100 移位指令的集中编程M100INCPSFT M100RST M100RX400X401X402LD X400OUT M100LD X401SFT M100LD X402RST M100 指令的分别编程X401X400X407X402X400X407OUTSFTRSTOUTSFTRSTM100M12
30、0X403X400X407M106M124M142OUTSFTRSTM140Y430ENDX400(CP)ABCDEFCK1CK1CK2CK2CK3CK3X401X402X403KM合格不合格012345X400ABCDEFGM100CK101020304050606M1202122232424CK2M140414242CK3检查检查30程序ACJP 700X400程序BEJP700程序C程序AX400=ON?程序B程序CYN CJP/EJP执行过程一般使用方法31指令梯形图符号ENDENDNOP空操作指令程序结束指令空操作和结束指令空操作和结束指令空操作指令空操作指令如果在调试程序时加入一定
31、量的NOP,在追加程序时可以减少步序步号的变动。在修改程序时可以用NOP指令删除接点或电路,也就是用NOP代替原来的指令,这样可以使步序号不变动。NOP指令的应用X400X401X402X403X404X405Y430Y431ANBANBORORLDLDX403X404LDX402X405789LDNOPX400X401ANDY430Y431OUTOUT0123456ANBANBLDX405LDX400X401Y430Y431OUTOUTNOPNOP789012345632 结束指令为END。PLC所执行的程序从第0步到END指令结束。如果在程序结束后不加END指令,PLC将继续读NOP空指令
32、,一直读到最大步序号。在调试程序过程中,也可以在程序中插入END指令,把程序分成若干段,由于PLC只执行从第0步到第一个END指令之间的程序,如果有错误就一定在这段程序中,将错误纠正后将第一个END删除,再调试或检查下一段程序。33定时器相当于通电延时型时间继电器,在梯形图中起时间控制作用。F1系列系列 PLC 32个定时器,相当于继电-接触器控制系统中的时间继电器,它能提供无数对常开、常闭延时触点供用户编程使用。定时器的延时时间是由编程中的设定值K来决定的。定时器按时钟脉冲分有10 ms、100 ms两挡。定时器的类型定时器编号定时范围设定格式1设定格式2T050T057T450T457T5
33、50T5570.1999 sK0.1 =0.1secK99.9=99.9sec3位10进制1位小数K1 =1secK999=999sec3位十进制整数T650-T657 0.01-99.9sK0.01=0.01secK99.9=99.9secK1 =0.01secK999=9.99sec34 起动条件有效时开始计时,到达设定值时,接点动作。起动条件失效定时器立即复位,接点恢复初始状态。定时完成后若想再次起动该定时器,必须先使起动条件失效。X400T4510 LD X400定时常数定时起动条件X400T450T450T451K19Y434T450K10Y430Y4311 OUT T451 1 O
34、UT T451 2 K 192 K 19LD T451OUT Y434设定定时器起动条件设定定时常数定时时间到动作X400Y430Y43110s5s10s不累计35 如果要求断电延时,可以采用图示的电路。X400T450Y430Y430X400T450K1919sY430X400 定时器断电延时的编程方法36通用定时器FX2N系列 积算定时器T450K123Y430X400T450123秒Y430X400T450通用型定时器T250K123Y0X0T25012.3秒Y0X0T250RSTT250X1X1积算型定时器37T T4 45 50 0K K1 1X X4 40 00 0X401T T4
35、 45 50 0Y Y4 43 30 0END定定时时时时间间到到刚刚扫扫描描完完此此行行本本次次执执行行结结果果仍仍认认为为定定时时未未到到滞后TKK1T4500T4501Y4301(内内部部)Y Y4 43 30 0输输出出刷刷新新滞滞后后2 2T T定时器接点在线圈下方最最大大滞滞后后2 2T TT450T450K1K1X400X400X401T450T450Y430Y430END定时时间到定时时间到刚扫描完此行刚扫描完此行本次执行结果仍本次执行结果仍认为定时未到认为定时未到滞后TKK1T4500T4500,Y4300T4501(内部)(内部)Y4301输出刷新Y4301输出刷新滞后2T
36、滞后2T定时器接点在线圈上方最大滞后3T最大滞后3TY4300Y4300K2T4501,Y4301(内部)(内部)滞后3T滞后3T38(1)断电延时型定时器 (2)通断电均延时型定时器 断电延时型定时器通断电均延时型定时器X400Y430T450X400Y430T45OK5X400Y4305ST450K2X400Y430T451T451K3T450X400Y4303S2SX400Y43039(3)定时脉冲电路(4)震荡电路定时脉冲电路震荡电路T450T450 K4M100T450T450 K4M100T4504S4S4S定时脉冲电路1定时脉冲电路2Y430Y430T450T450Y430T45
37、0T450K1Y4301S1S1S1SX400X400T45040(5)占空比可调震荡电路(6)上升沿单稳态电路占空比可调震荡电路上升沿单稳态电路T451T450T450K2T451T451T450K2T451K5K32S3S2S3S震荡电路1震荡电路2T450Y430T450K1T450X400Y4301SX400Y4301S41(7)下降沿单稳态电路下降沿单稳态电路X40OY43O1S1SX400Y430T450K1T450Y430M100M100X40042 为了保证运行安全,许多大型生产机械在运行起动之前需用电铃或蜂鸣器发出报警信号,预示机器即将起动,警告人们迅速退出危险地段。试设计P
38、LC控制接线图和梯形图。起动报警控制电路SB1SB2X401X400Y431Y430COMCOM1KM电铃X401Y431Y430X400T450T450X401Y431Y430X400运行预警T45O Y431Y430电动机HA起动停止起动停止电动机K3(a)PLC接线图(b)梯形图(c)波形图43 用按钮控制三台电动机,为了避免三台电动机同时起动,起动电流过大,要求每隔5秒起动一台,试设计PLC控制梯形图。三台电动机顺序起动控制Y432Y431Y430X400X401X400X401Y430T450T450Y431Y432Y432T450T450Y431Y430Y431Y430K55S5S
39、(b)波形图(a)顺序定时起动同时停止梯形图 起动起动停止停止第一台第二台第三台第一台第二台第三台44 计数器用于对各种软元件接点的闭合次数进行计数,达到设定值时计数器接点动作。计数值减为0后一直保持为0不变,直到计数器被复位为止。F1系列PLC除C660与C661外,均为减计数器,计数范围为0999;有掉电保护。掉电时保持当前计数值,电源恢复后继续计数。若不需要保留当前值,须用M71初始化脉冲使计数器在上电时复位。计数器可分为两大类:内部信号计数器和外部信号计数器(即高速计数器)。内部信号计数器用于对PLC中的内部软元件(如X、Y、M、S、T、C)的信号进行计数。32个3位计数器:C060C
40、067,C460C467,C560C567,C660C667,其中C660和C661为级联计数器。45M71M71X400X400R RX401X401CPCPRSTRSTC462C462OUTOUTK5K5C462C462Y431Y4310 LD M710 LD M711 OR X4001 OR X4002 RST C4622 RST C4623 LD X401 3 LD X401 4 OUT C4624 OUT C4625 K 55 K 56 LD C4626 LD C4627 OUT Y4317 OUT Y4311 12 23 34 45 5R RX401X4015 54 43 32 2
41、1 10 05 56 67 70 0C462C462当前计数值当前计数值Y431Y431(C462接点控制)(C462接点控制)3位减计数器的编程 3位减计数器的编程集中编程集中编程RSTRST C462C462M71M71X400X400C462C462K5K5X401X401Y431Y431C462C462分散编程分散编程46T T4 45 50 0K K1 1M M1 10 00 0T T4 45 51 1T T4 45 51 1K K1 1T T4 45 50 0Y Y4 43 30 0T T4 45 50 0E EN ND DC C4 46 60 0T T4 45 51 1K K5
42、5M M1 10 00 0C C4 46 60 0X X4 40 00 0R RS ST TC C4 46 60 0X X4 40 00 0Y430下跳沿计数机械自锁X4001s1sT450T451Y430Y431476位计数器编程方法(内部计数模式)使用C660、C661组成6位计数器使用特殊功能辅助继电器M470、M471、M472、M473;M4700为普通计数方式、M4701为高速计数方式;M4710为减计数、M4711为加计数。减计数时,X402动作5001次计数器接点动作;加计数时,X402动作(10000005001)次接点动作。接点动作后必须经过复位计数器操作才能使计数器接点恢
43、复。M470M470M70M70M471M471X400X400X401X401ENDENDC661C661X402X402K5K5C660C660RSTRST C660C660C660C660使用6位普通计数由X400决定加减同时复位C660、C661先高后低K1计数值005001Y430接点采用低位符号复位低位48(1)循环计数器循环计数器C460X400C460C460K10RSTC460Y430循环计数器X4001 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22Y430012345678910012345678910012C
44、46049画梯形图时应注意的以下几点:梯形图中的连接线(相当于导线)不能相互交叉,并且只能水平或垂直绘制,梯形图中的接点一般只能水平绘制,不能垂直绘制,各种继电器线圈只能与右母线连接,不能与左母线连接,接点不能与右母线连接,接点中的“电流”只能从左向右单方向流动,不能出现反向流动的现象。不连接导线和逆流接点的处理SA1SA2SA3SA4SA5KM1KM2KM3Y1Y2Y3X1X2X3X4X5导线不连接导线连接Y2X1X3X4X5Y1X1X2X3X4X5Y3(a)(b)(c)X1X2X3X4X5Y1Y2Y350接点组逆流接点的处理 X400X401X403X404Y430X402X400X401
45、Y430X402X403X400X402X403X404(a)X400X401X403X404Y430X402X400X401Y430X402X403X400X402X403X404(b)Y431Y43151图(a)是不符合规定的梯形图,可以改为图(b)。不能编程梯形图的修正SETM102M103Y430Y431Y432Y433X400X401左母线右母线SETM102M103Y430Y431Y432Y433X400X401左母线右母线MCM100T450K5X405MCM100T450K5X405MCRM100M71M71(a)(b)52 单接点后移可以减少ANB和ORB指令的使用。单接点后
46、移X400X401Y430X402X403X402X403X400X401Y430ANBORBLD X400X402ANDY430OUTLDLD X401X4030123456ORANDLDX400X402ANDY430OUTX401X40301234单接点单接点单接点单接点单接点 单接点(a)(b)53单接点后移ANDORORBLDX400X401X402ANDANDY430LDX403X404X405X406X407OUTANDAND0ORB1ANB212311410596877869543210ANDOUTX407X406X405X404X403LDLDLDLDY430 ANDANDX4
47、02X400X401X401X400Y430LDORBANBX407X402X403X404X405X406X406X405X404X403X402X407Y430X401X400单接点单接点单接点单接点(a)(b)54梯形图中的接点或变量应尽可能用逻辑代数的基本公式进行化简。采用普通非步进编程时,梯形图某一线圈只能出现一次,即不应出不应出现双线圈,现双线圈,除非作为锁存线圈的S和R成对出现;串联接点较多的支路在上、并联支路在左、线圈紧靠右母线。串联接点较多的支路在上、并联支路在左、线圈紧靠右母线。梯形图编译执行方法规定,不允许使用桥式梯形图;不允许使用桥式梯形图;Y430X401X402X4
48、05X403X404错误的桥式梯形图Y430X404 X403 X402X401X401 X403 X405X404正确55多路分支电路的化简T0 K20X0Y0T1T1K30T0X0Y0T0K20X0Y0T1T1K30T0X0Y0(a)化简电路之一(b)化简电路之二Y430X400X401X402X403X404Y431Y432Y430X400X401X402X403X404Y431Y432Y430Y430Y43056 方法方法1:直接按原理图编程:按各线圈供电线路独立编程:直接按原理图编程:按各线圈供电线路独立编程 方法方法2:按各线圈供电线路写出逻辑表达式,分析简化后:按各线圈供电线路写
49、出逻辑表达式,分析简化后编程编程F FR RS SB B1 1S SB B2 2K KM M1 1K KM M2 2K KM M1 1K KT TK KM M2 2K KM M1 1K KT TK KM M2 21 1)控控制制原原理理线线路路X X4 40 00 0X X4 40 01 1X X4 40 02 2Y Y4 43 31 1Y Y4 43 32 2Y Y4 43 31 1X X4 40 02 2Y Y4 43 31 1Y Y4 43 31 1X X4 40 00 0X X4 40 01 1T T4 45 50 0K K0 0.5 5X X4 40 02 2Y Y4 43 31 1
50、X X4 40 00 0X X4 40 01 1T T4 45 50 0Y Y4 43 32 2Y Y4 43 32 2E EN ND D2 2)直直接接按按原原理理图图编编制制梯梯形形图图T450Y432Y432动作时Y431不能通电此并联支路可去Y432T45057原电路的逻辑表达式为 KM1=/FR*/SB1*(SB2+KM1KM2*KT)*/KM2 KT=/FR*/SB1*(SB2+KM1KM2*KT)*KM1 KM2=/FR*/SB1*(KM2+KT*(SB2+KM1)通断条件分析简化:KTKM1;顺序联锁,KT后动 KM1=/FR*/SB1*(SB2+KM1)*/KM2;KM2对K
51、M1有联锁,KM21不可能KM11;KM2*KT项可去掉。KM2/FR*/SB1*(KM2+KT);KT=1隐含KM11 END3)经过逻辑分析化简后的梯形图(tdzu.plc)11 ANI X40013 OUT Y432X402Y431X400 X401Y431T450X400 X401Y432Y432Y431T450K0.5Y4320 LD X4021 OR Y4312 ANI X4003 ANI X4014 ANI Y4325 OUT Y4316 6 L LD D Y Y4 43 31 17 7 O OU UT T T T4 45 50 08 8 K K 0 0.5 59 LD T450
52、10 OR Y43212 ANI X40114 END定时器起动条件定时常数设定58Q1L+I KA1KM1ML-KM3KM2KT2R2R1KM1Q2R4VDR3KM1KA1KA2SB1SB2KM1KT1KT2KM3KM2KM1KT1KA2L+L-1234567891011122021222324252659 分析:原电气控制线路定时器采用断电延时动作触点,不便用直接代换方法编程。动作分析:起动前须先有励磁:电流继电器KA2动作;顺序联锁 起动时串R1、R2,KM1动作、KM2、KM3不动作;经定时先KM2动作切除R1,再定时KM3动作切除R2;采用两个定时器:采用两个定时器:T450(设定时
53、(设定时2s)、)、T451(设定时(设定时1s);起动、运行中若发生过电流,KA1动作则断电停车;KM1断开时KM2、KM3均应断开;60 现场输入信号有:按钮:SB1、SB2;电流继电器触点:KA1、KA2;分配:X400(停车)、X401(起动)、X402(过流)、X403(无励磁)需输出控制的接触器:KM1、KM2、KM3。分配:Y431、Y432、Y433SB1SB2KA1KA2X400 X401 X402 X403COM可编程控制器Y431Y432KM1KM2COM1FUL1N现场信号输入控制输出到现场KM3Y43361KA1KA2SB1SB2KM1KT1KT2KM3KM2KM1K
54、T1567891011KM1X402 X403 X400X401Y431M101M102Y433Y432Y431通电延时直流起动草图1用M*代替原断电延时的KT*M100M100Y431X402 X403 X400X401Y431M101Y433Y432Y431并联前移停磁过流M102M101T450K2T450M101M102T451K1T451M102M100M100M101M101M100Y431END断电延时起动断开X401Y431Y432Y433M100M100M101M101M102M102T450T4512s1s又:M100/Y431故M100的作用可由Y431替代即用Y431常
55、闭替换M100常开Y431的常开替换M100常闭M100即可不用M100断电后延时2s M100断电后延时2s M101断电常闭闭合M101断电常闭闭合 对应KT162方法2:分析起动动作时序:逻辑表达式:KM1:Y431(X401+Y431)*X403*/X402*/X400 ;原控制不含定时器,可直接代换KT1:T450Y431,K2KM2:Y432=T450KT2:T451Y432T450,K1KM3:Y433=T451说明:当有停车(X400)、过流(X402)或欠励磁(X403)发生使Y431(KM1)释放时,T450释放;Y432也释放;进而T451释放,Y432释放。X401Y4
56、31Y432Y4332s1sT450T451定时器起动R1切除R2切除电枢电源接通X403无励磁保护63ENDEND14 OUT Y43314 OUT Y43310 OUT Y43210 OUT Y432X401X401Y431Y431X400X400 X402X402Y431Y431T450T450T451T451X403X403Y431Y431T450T450K2K2Y432Y4320 LD X4010 LD X4011 OR Y4311 OR Y4312 ANI X4002 ANI X4003 ANI X4023 ANI X4024 AND X4034 AND X4035 OUT Y43
57、15 OUT Y4316 LD Y4316 LD Y4317 OUT T4507 OUT T4508 K 28 K 29 LD T4509 LD T45013 LD T45113 LD T45112 K 112 K 115 END15 END定时器起动条件定时器起动条件定时常数设定定时常数设定T451T451K1K1Y433Y43311 OUT T45111 OUT T451;可去;可去励磁励磁过流过流停车停车起动起动64控制要求:控制要求:人靠近门,感应器X400为ON,Y430驱动电机高速开门;碰到开门减速开关X401,变为Y431低速开门;碰开门极限开关X402,电机停车,延时。1秒秒内
58、感应器检测到无人,Y432起动电机高速关门;碰关门减速开关X403时,改为Y433低速关门;碰关门极限开关X404时电机停止。关门期间若感应器X400检测到有人,立即停止关门,延时0.5秒秒后自动转换为高速开门。关门减速X400 X401 X402 X403COM可编程控制器Y430Y431KM1KM2COM1FUL1N现场信号输入控制输出到现场KM3Y432有人开门减速全开全关X404高速开低速开高速关低速关Y433KM4KM2KM3KM4KM1KM3KM4KM1KM2KM4KM1KM2KM3红外65编程分析:编程分析:输出线圈:输出线圈:Y430(高速开)、(高速开)、Y431(低速开)、
59、(低速开)、Y432(高(高速关)、速关)、Y433(低速关)定时(低速关)定时器:器:T450(1s););T451(0.5s)。Y430Y431T450K1Y432Y433K0.5END高速开门低速开门高速关门低速关门T451延时开门停止关门关门中有人梯形图设计第一步 接通条件分析:接通条件分析:Y430(高开):(1)有人(X4001);(2)关门中来人(X4001且0.5s延时到:T4511)。编程要点:能区别两种情况。情形编程要点:能区别两种情况。情形2时应能使情形时应能使情形1接通条件失效。接通条件失效。接通条件接通条件X400(?)(?)T451分析:分析:两种情形均有X4001
60、成立,若直接以X4001为接通条件 将使第二种情形变为无延时接通。情形2的不同在X4001前有关门动作,但关门动作在X4001时会停止。故增加内部继电器记忆关门动作,并令此记忆在开门时失效:M100(Y432Y433自锁自锁M100)/Y430 接通条件接通条件X400/M100T451分断条件:低速限位分断条件:低速限位X401动作。动作。互锁考虑:互锁考虑:与低速开、高速关、低速关形成互锁;自锁考虑自锁考虑:接通条件Y430Y430(接通条件(接通条件Y430/X401/Y431/Y432/Y433 66X400X401Y430Y431 Y432 Y433Y430T451X401X402Y
61、431Y430Y432 Y433Y431X402T450K1X400T450X403Y432Y430 Y431 Y433Y432X400X403X404Y433Y431 Y432 Y430Y433X400X432M100Y431Y430Y433M100K0.5END高速开门低速开门高速关门低速关门关门动作有人低速互锁全开低速M100T451延时开门停止关门M100X400关门中有人低速低速全关有人高速关低速关高速开低速开有人关门关自锁67一辆小车在O点原位(SQ1位置开关动作),按起动按钮后,小车由O点前进行驶到A点后返回原点,再由原点前进行驶到B点,由B点返回到原点,并自动反复执行上述动作过程。要求在小车在运行过程中按停止按钮时,小车立即停止,按前进按钮,小车前进。按后退按钮,小车应退回到原点停止。(其中位置开关SQ1SQ3均为接近开关)。送料车自动循环示意图SQ3SQ2SQ1X404X403AX402BOX400X401后退前进原位停止X405Y430Y431后退前进ABO
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
