 动力学中的传送带模型
动力学中的传送带模型

《动力学中的传送带模型》由会员分享,可在线阅读,更多相关《动力学中的传送带模型(6页珍藏版)》请在装配图网上搜索。
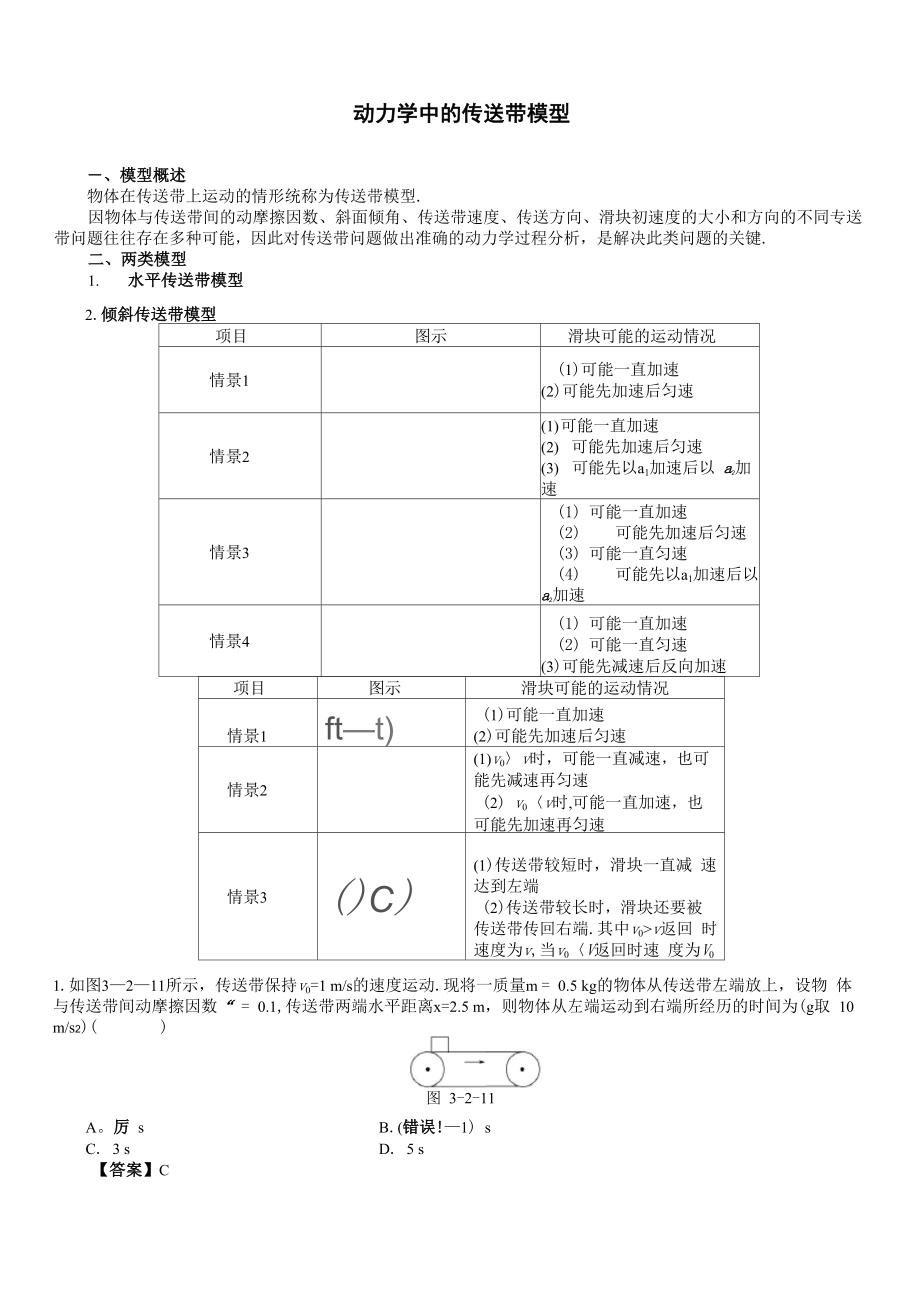
1、动力学中的传送带模型、模型概述物体在传送带上运动的情形统称为传送带模型.因物体与传送带间的动摩擦因数、斜面倾角、传送带速度、传送方向、滑块初速度的大小和方向的不同专送 带问题往往存在多种可能,因此对传送带问题做出准确的动力学过程分析,是解决此类问题的关键.二、两类模型1. 水平传送带模型2.倾斜传送带模型项目图示滑块可能的运动情况情景1(1)可能一直加速(2)可能先加速后匀速情景2(1) 可能一直加速(2) 可能先加速后匀速(3) 可能先以a1加速后以 a2加速情景3(1) 可能一直加速(2) 可能先加速后匀速(3) 可能一直匀速(4) 可能先以a1加速后以 a2加速情景4(1) 可能一直加速
2、(2) 可能一直匀速(3)可能先减速后反向加速项目图示滑块可能的运动情况情景1ftt)(1)可能一直加速(2)可能先加速后匀速情景2(1)v0v时,可能一直减速,也可 能先减速再匀速(2) v0v时,可能一直加速,也 可能先加速再匀速情景3()C)(1)传送带较短时,滑块一直减 速达到左端(2)传送带较长时,滑块还要被 传送带传回右端.其中v0v返回 时速度为v,当v0V返回时速 度为V01.如图3211所示,传送带保持v0=1 m/s的速度运动.现将一质量m = 0.5 kg的物体从传送带左端放上,设物 体与传送带间动摩擦因数“ = 0.1,传送带两端水平距离x=2.5 m,则物体从左端运动
3、到右端所经历的时间为(g取 10 m/s2)()图 3-2-11A。厉 sB.(错误!1) sC. 3 sD. 5 s【答案】C2、(2014届大连模拟)如图32 19所示,水平传送带A、B两端相距x=3.5 m,物体与传送带间的动摩擦因数“A. 若传送带不动,vB=3 m/sB. 若传送带逆时针匀速转动,vB一定等于3 m/sC. 若传送带顺时针匀速转动,vB一定等于3 m/sD. 若传送带顺时针匀速转动,vB有可能等于3 m/s【解析】 当传送带不动时,物体从A到B做匀减速运动=0。1,物体滑上传送带A端的瞬时速度VA=4 m/s,到达B端的瞬时速度设为vB.下列说法中正确的是(错误!,a
4、二/dg 1 m/s2 /物体到达B点的速度vB二3 m/s。当传送带逆时针匀速转动时物体滑上传送带后所受摩擦力不变物体以相同的加速度一直减速至BB当传送带顺时针匀速转动时,传送带的速度不同,物体滑上传送带后的运动情况不同如果传送带速度大于4m/s,则物体可能一直加速,也可能先加速后匀速;当传送带速度等于4 m/s时,物体匀速;当传送带速度小于4 m/s 时,物体可能一直减速,也可能先减速后匀速.【答案】ABD3、如图32 8所示,水平传送带AB长L=10 m,向右匀速运动的速度v0=4 m/s,一质量为1 kg的小物块(可视 为质点)以v1 = 6 m/s的初速度从传送带右端B点冲上传送带,
5、物块与传送带间的动摩擦因数=0。4,取10 m/s2。求:图 32 8(1)物块相对地面向左运动的最大距离;(2)物块从B点冲上传送带到再次回到B点所用的时间.【解析】 设物块与传送带间的摩擦力大小为ffdmgf ma0 - v错误! - 2as物s 物4。5 m(2)设小物块经时间t1速度减为0,然后反向加速,经过时间t2与传送带速度相等0 。 - atJ 1.5 s二叫t2 1 s设反向加速时,物块的位移为U ,则有$如/错误!-2 m物块与传送带共速后,将做匀速直线运动,设经 时间t3再次回到B点s 物-S v0t3t3 0。625 s所以 t 总二+ /2 + /3-3.125 s【答
6、案】(1)4。5 m (2)3.125 s 4.(2014.长沙一中模拟)传送机的皮带与水平方向的夹角为a如图3 1 19所示,将质量为m的小物块放在皮带传送机上,随皮带保持相对静止一起向下以加速度a(agsin a)做匀加速直线运动,则下列关于小物块在运动过程的说法中正确的是()A 支持力与静摩擦力的合力大小等于mgB. 静摩擦力沿斜面向下C 静摩擦力的大小可能等于mgsin aD.皮带与小物块的动摩擦因数一定大于tan a【解析】 物块随皮带保持相对静止一起向下做匀加速运动,物块所受合外力不为零,所以支特力与静摩擦力 的合力大小不等于mg.故A错;加速度agsin a ,说明静摩擦力沿传送
7、带向下,B对;由牛顿第二定律知mgsin a+f ma,因为a比gsin a大多少不知道,所以静摩擦力的大小可能等于mgsin a , C对;由以上分析可知,静摩擦力f是有可能小于mgsin a的,由仁叭二卩mgcos a ,因此说“皮带与小物块的动摩擦因数一定大于tana”是 错的,D错.【答案】BC5、(12分)如图327所示,绷紧的传送带,始终以2 m/s的速度匀速斜向上运行, 传送带与水平方向间的夹角0=30.现把质量为10 kg的工件轻轻地放在传送带底端P 处,由传送带传送至顶端Q处.已知P、Q之间的距离为4 m,工件与传送带间的动 摩擦因数为=错误!,取g=10 m/s2。(1)通
8、过计算说明工件在传送带上做什么运动;(2)求工件从P点运动到Q点所用的时间.【审题指导】(1)工件受的摩擦力为动力.(2 )传送带匀速,工件放到传送带上后做初速为零的匀加速直线运动,要判断工件的运动有没有转折.【规范解答】(1)工件受重力、摩擦力、支持力共同作甩摩擦力为动力 由牛顿第二定律得屮mgcos 0 - mgsin 0二ma代入数值得:a二2。5 m/s2则其速度达到传送带速度时发生的位移为X二错误!二错误!m = 0.8 m4 m可见工件先匀加速运动0.8 m,然后匀速运动3。2 m(2 )匀加速时,由x = |t得二0.8 s 匀速上升时t2二错误!二错误! s二1.6 s 所以工
9、件从P点运动到Q点所用的时间为t 二片 +12 二 2.4 s 评分标准式每式2分【答案】(1)先匀加速运动0。8 m,然后匀速运动3.2 m (2) 2。4 s6.(多选)如图5 1 1所示,在皮带传送装置中,皮带把物体P匀速带至高处,在此过程中,下述说图 5 1 1法正确的是()A. 摩擦力对物体做正功B. 摩擦力对物体做负功C. 支持力对物体不做功D. 合外力对物体做正功【解析】 物体P匀速向上运动过程中,受静摩擦力作用,方向沿皮带向上对物体做正功,支持力垂直于皮 带,做功为零,合外力为零,做功也为零,故A、C正确,B、D错误.【答案】AC7、(14分)(2013西安一中模拟)如图542
10、1所示,倾角为30的光滑斜面的下端有一水平传送带,传送带正以 6 m/s的速度运动,运动方向如图所示.一个质量为2 kg的物体(物体可以视为质点),从h=3.2 m高处由静止沿斜 面下滑,物体经过A点时,不管是从斜面到传送带还是从传送带到斜面,都不计其动能损失.物体与传送带间的动 摩擦因数为0.5,物体向左最多能滑到传送带左右两端AB的中点处,重力加速度g取10 m/s2,则:(1) 物体由静止沿斜面下滑到斜面末端需要多长时间?(2) 传送带左右两端AB间的距离l至少为多少?(3) 上述过程中物体与传送带组成的系统产生的摩擦热为多 T少?(4) 物体随传送带向右运动,最后沿斜面上滑的最大高度h
11、为多少?【解析】(1)对物体:mgsin 0-ma错误!二错误!at2可得 t 二 1.6 s.(2 )由能的转化和守恒得:mgh二“mg错误!解得:l 二 12。8 m。(3 )物体与传送带间的相对位移x相二错误!带ti而错误!二错误! 错误!,摩擦热Q二“mgx相,以上三式联立可得Q二160 J.(4)物体随传送带向右匀加速运动,设当速度为v带二6 m/s时向右的位移为x ,则“mgx二错误! mv错误!,得x 二3。6 m错误!,即物体在到达A点前速度与传送带相等,最后以v带二6 m/s的速度冲上斜面,根据机械能守恒有 错误!mv错误!二mgh,得h二 1.8 m.【答案】(1) 1。6
12、 s(2) 12。8 m (3) 160 J (4) 1。8 m8、 (15 分) (2013安徽师大附中、安庆一中联考)如图8所示,传送带以v=10 m/s速度向左匀速运行,AB段长L 为2 m,竖直平面内的光滑半圆形圆弧槽在B点与水平传送带相切,半圆弧的直径BD=3.2 m且B、D连线恰好在 竖直方向上,质量m为0.2 kg的小滑块与传送带间的动摩擦因数“为0。5, g取10 m/s2,不计小滑块通过连接处的 能量损失.图中OM连线与水平半径OC连线夹角为30,求:(1) 小滑块从M处无初速度滑下,到达底端B时的速度;(2) 小滑块从M处无初速度滑下后,在传送带上向右运动的最大距离以及此过
13、程产生的热量;(3)将小滑块无初速度地放在传送带的A端,要使小滑块能通过半圆弧的最高点D,传送带AB段至少为多长?【解析】(1 )根据机械能守恒定律:mgR ( 1 - cos 60 )二错误! mv错误!,得 vB = 4 m/s。(2 )小滑块做匀减速运动至停止时距离最大,0-v错误!二 -2ax a =g = 5 m/s2x=1.6 m , t 二错误!二0。8 s,x 相二 vt + 错误!vBt 二 9.6 mQ = Fx 相二mgx 相=9。6 J.(3 )小滑块能通过D点的临界条件:mg二m错误! 根据机械能守恒:-mg2R =错误! mv2 -错误! mv错误! 小滑块在传送带
14、上加速过程:v错误!二2ax ,x二8 m.【答案】(1) 4 m/s (2) 1。6 m 9.6 J (3)8 m9、如图547所示,质量为m的物体在水平传送带上由静止释放,传送带由电动机带动,始终保持以速度v匀 速运动,物体与传送带间的动摩擦因数为,物体在滑下传送带之前能保持与传送带相对静止,对于物体从静止释 放到与传送带相对静止这一过程,下列说法中正确的是( )电动机多做的功为mv2物体在传送带上的划痕长错误!传送带克服摩擦力做的功为|mv2电动机增加的功率为“mgvA.B.C.D.【解析】 小物块与传送带相对静止之前,物体做匀加速运动,由运动学公式知x物二错误! t ,传送带做匀速 运
15、动,由运动学公式知x传二vt,对物块根据动能定理“mgx物二错误! mv2,摩擦产生的热量Q二“mgx相二“mg (x传-x 物),四式联立得摩擦产生的热量Q=|mv2,根据能量守恒定律电动机多做的功一部分转化为物块的动能,一部分转 化为热量,故电动机多做的功等于mv2 , A项错误;物体在传送带上的划痕长等于x传-x物二x物二错误! , B项错 误;传送带克服摩擦力做的功为“mgx传二2“mgx物二mv2,C项错误;电动机增加的功率也就是电动机克服摩擦力做功 的功率为“mgv,D项正确.【答案】D10、(16分)(2013届山师大附中检测)如图546所示,传送带与水平面之间的夹角0=30。,
16、其上A、B两点间的距离L=5 m,传送带在电动机的带动下以v = 1 m/s的速度匀速运动.现将一质量m = 10 kg的小物体(可视为质点) 轻放在传送带的A点,已知小物体与传送带之间的动摩擦因数错误!,在传送带将小物体从A点传送到B点的 过程中,求:(取g=10 m/s2)(1)传送带对小物体做的功.(2)电动机做的功.【规范解答】 (1)小物块加速过程根据牛顿第二定律有:“mgcos 3 - mgsin 3 二 ma ( 2 分)物块上升的加速度a二错误! g二2.5 m/s2(1分)当物块的速度v = 1 m/s时,位移是:x二错误! =0O 2 m(2分)即物块将以v二1 m/s的速
17、度完成4o 8 m的路程,(1分)由功能关系得:W=人样 + AEk 二 mgLsin 3 + gmv2 255 J -( 2 分)(2 )电动机做功使小物体机械能增加同时小物体与传送带间因摩擦产生热量Q,由v二at得t二V二0.4 s(2分)a相对位移 x / 二 vt - 错误!vt = 0o 2 m(2 分)摩擦生热 Q 二 ymgx x cos 3 - 15 J(2 分)故电动机做的功W电-W+Q-270 J . (2分)【答案】 (1)255 J (2) 270 J总结:一、模型概述传送带模型是高中物理中比较成熟的模型,典型的有水平和倾斜两种情况.一般设问的角度有两个:1. 动力学角度:首先要正确分析物体的运动过程,做好受力情况分析,然后利用运动学公式结合牛顿第二定律, 求物体及传送带在相应时间内的位移,找出物体和传送带之间的位移关系.2. 能量角度:求传送带对物体所做的功、物体和传送带由于相对滑动而产生的热量、因放上物体而使电动机 多消耗的电能等,常依据功能关系或能量守恒定律求解.二、传送带模型问题中的功能关系分析1 功能关系分析:WF=AEk+AEp+Q.2.对WF和Q的理解:(1)传送带的功:WF=Fx传;F传(2)产生的内能Q=Ff相对.
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
