《三相混合式步进电机驱动器设计原理和控制详解》由会员分享,可在线阅读,更多相关《三相混合式步进电机驱动器设计原理和控制详解(9页珍藏版)》请在装配图网上搜索。
1、上海昀研自动化科技有限公司自 2004年起致力于三相混合式步进电机及驱动器 的开发,42 系列低压三相混合式步进电机,57 系列低压、高压三相混合式步进 电机,86 系列低压、高压三相混合式步进电机,110、130 系列高压三相混合式 步进电机,YK3605MA, TK3411MA, YK3822MA, YKA3722MA等多款产品已成功应用 于市场。上海昀研自动化科技有限公司生产的三相混合式步进电机采用交流伺服 原理工作,转子和定子的直径比高达 50%,高速时工作扭矩大,低速时运行极其 平稳,几乎无共振区。其配套驱动器YK3822MA具有单相220V/50Hz输入,三相 正弦输出,输出电流可
2、设置,具有十细分和半流额定值 60%功能;控制方式灵活, 有“脉冲+方向控制”,也有“正转脉冲+反转脉冲”控制方式;有过热保护功能, 因此使用起来十分的方便。1 前言 步进电机是一种开环伺服运动系统执行元件,以脉冲方式进行控制,输出角位移。 与交流伺服电机及直流伺服电机相比,其突出优点就是价格低廉,并且无积累误 差。但是,步进电机运行存在许多不足之处,如低频振荡、噪声大、分辨率不高 等,又严重制约了步进电机的应用范围。步进电机的运行性能与它的驱动器有密 切的联系,可以通过驱动技术的改进来克服步进电机的缺点。相对于其他的驱动 方式,细分驱动方式不仅可以减小步进电机的步距角,提高分辨率,而且可以减
3、 少或消除低频振动,使电机运行更加平稳均匀。总体来说,细分驱动的控制效果 最好。因为常用低端步进电机伺服系统没有编码器反馈,所以随着电机速度的升 高其内部控制电流相应减小,从而造成丢步现象。所以在速度和精度要求不高的 领域,其应用非常广泛。因为三相混合式步进电机比二相步进电机有更好的低速平稳性及输出力矩,所以 三相混合式步进电机比二相步进电机有更好应用前景。传统的三相混合式步进电 机控制方法都是以硬件比较器完成,本文主要讲述使用 DSP 及空间矢量算法 SVPWM 来实现三相混合式步进电机控制。2细分原理 步进电机的细分控制从本质上讲是通过对步进电机的定子绕组中电流的控制,使 步进电机内部的合
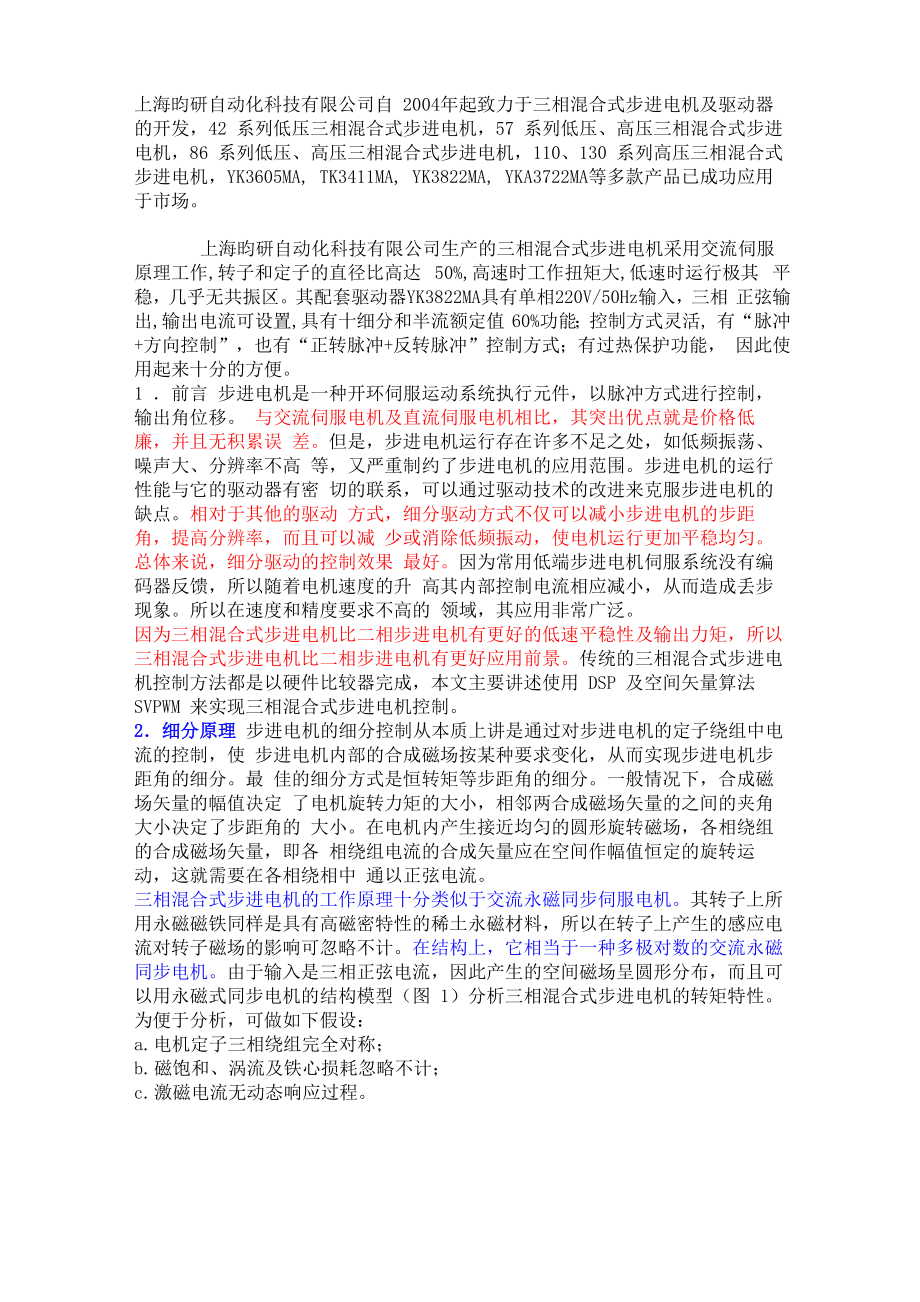
4、成磁场按某种要求变化,从而实现步进电机步距角的细分。最 佳的细分方式是恒转矩等步距角的细分。一般情况下,合成磁场矢量的幅值决定 了电机旋转力矩的大小,相邻两合成磁场矢量的之间的夹角大小决定了步距角的 大小。在电机内产生接近均匀的圆形旋转磁场,各相绕组的合成磁场矢量,即各 相绕组电流的合成矢量应在空间作幅值恒定的旋转运动,这就需要在各相绕相中 通以正弦电流。三相混合式步进电机的工作原理十分类似于交流永磁同步伺服电机。其转子上所 用永磁磁铁同样是具有高磁密特性的稀土永磁材料,所以在转子上产生的感应电 流对转子磁场的影响可忽略不计。在结构上,它相当于一种多极对数的交流永磁 同步电机。由于输入是三相正
5、弦电流,因此产生的空间磁场呈圆形分布,而且可 以用永磁式同步电机的结构模型(图 1)分析三相混合式步进电机的转矩特性。 为便于分析,可做如下假设:a. 电机定子三相绕组完全对称;b. 磁饱和、涡流及铁心损耗忽略不计;c. 激磁电流无动态响应过程。图 1 三相永磁同步电机的简单结构模型U、V、W 为定子上的 3 个线圈绕组,3 个线圈绕组的轴线成 120。电机单相 绕组通电的时候,稳态转矩可以表达为:T=f (i, theta)。其中,i为绕组中通 过的电流;theta为电机转子偏离参考点的角度。由于磁饱和效应可以忽略不计, 并且转子结构是圆形,其矩角特性为严格的正弦,即: T=k *I*sin
6、(theta), k 为转矩常数若理想的电流源以恒幅值为I的三相平衡电流iU、iV、iW供给电机绕组,即: iU=I*sin(wt)iV=I*sin(wt+2*PI/3)iW =I*sin(wt+4*PI/3)则电机各相电流产生的稳态转矩为: TU=k*I*sin(wt) *sin(theta)TV=k*I*sin(wt+2*PI/3) *sin(theta+2*PI/3)TW=k*I*sin(wt+4*PI/3) *sin(theta+4*PI/3)稳态运行时,theta=wt,则三相绕组产生的合成转矩为:T=TU+TV+TW=3/2*k*I*sin(PI/2-wt+theta) =3/2*
7、k*I 以上分析表明,对于三相永磁同步电机,当三相绕组输入相差 120的正弦电流 时,由于在内部产生圆形旋转磁场,电机的输出转矩为恒值。因此,将交流伺服 控制原理应用到三相混合式步进电机驱动系统中,输入的220V交流,经整流后 变为直流,再经脉宽调制技术变为三路阶梯式正弦波形电流,它们按固定时序分 别流过三路绕组,其每个阶梯对应电机转动一步。CBCBAACBCBACBCBAf通过改变驱动器输出正弦电流的频率来改变电机转速,而输出的阶梯数确定了每 步转过的角度,当角度越小的时候,那么其阶梯数就越多,即细分就越大,从理 论上说此角度可以设得足够的小,所以细分数可以是很大,而交流伺服控制的每 步角度
8、与反馈的编码器的精度有很大的关系,一般使用的为 2500线,所以每一 步转过的角度仅为 0.144 度,而此方法控制的步进电机,比如其细分数为 10000, 则每一步转过的角度为 0.036 度,所以比一般的伺服控制精度高很多。当然,步 进电机转动时,电机各相绕组的电感将形成一个反向电动势,频率越高,反向 电动势越大。在它的作用下,电机随频率(或速度)的增大而相电流减小,从 而导致力矩下降,通过恒流方式可以使在电机低频和高频时保持同样的相电流从而使高频的力矩特性有所改善,这只能是在低速时,所以其综合性能(高低速噪声,高速力矩,高速平稳性等)很难赶超交流伺服控制系统。图 2 给出相差 120 的
9、三相阶梯式正弦电流三相混合式步进电机一般把三相绕组连接成星形或者三角形,按照电路基本定 理,三相电流之和为零。即IU+IV+IW=O。所以通常只需产生两相绕组的给定信 号,第三相绕组的给定信号可由其它两相求得。同样,只需要对相应两相绕组的 实际电流进行采样,第三相绕组的实际电流可根据式求得。3三相混合式步进电机驱动器的系统构成驱动器的总体方案如图3所示,主要包括单片机电路、电流追踪型SPWM电路和 功率驱动电路组成。图 3 驱动器的整体框图3.1 DSP 模块设计 在这里,我们选择了 TI公司的DSP作为CPU芯片,DSP (Digital Signal Processor)实际上也是一种单片
10、机,它同样是将中央处理单元、控控制单元和 外围设备集成到一块芯片上。但它又有自身鲜明的特点因为采用了多组总线 技术实现并行运行的机机制,从而大大提高了运算速度,具有更强的运算能力和 更好的实时性。本文选用的DSP (TMS320LF2407A)是一款电机控制专用芯片, 144 引脚,具有丰富的 IO 资源,含有四个通用定时器,具有两路专用于控制三 相电机的PWM发生器(可产生六路PWM信号),另外还有专用接收外部脉冲和方 向的I/O 口,从而简化了电路设计和程序开发。DSP输入信号包括步进脉冲信号CP、方向控制信号、脱机信号,过流保护信号。 这几种信号均通过高速光耦连接到DSP的引脚上,另外还
11、有细分步数及电流选择 信号。当脱机信号为有效时,驱动器输出到电机的电流被切断,电机转子处于自 由状态(脱机状态)。反馈电流通过DSP自带的的10位模数转换器(AD)采样, 反馈的电流通过一定的算法后,由DSP自带的PWM 口输出控制电机。3.2 电流追踪型回路 这种传输方式以模拟电压的幅值代表采样电流或者电压的大小,其主要用来采样 a, b 两相电流及母线电压检测,实现电机电流控制以及过压、欠压、过流保护。 驱动器通过采样电阻检测步进电机绕组的实际电流,与设定电流相比较后经过滞 环比较器调节器,调节器输出信号由 20KHz 频率的三角波载波输出,形成脉宽 调制信号(PWM),通过功率驱动接口电
12、路来控制大功率半导体器件的导通与关 断,使步进电机的绕组实际电流跟踪给定参考信号,按给定的正弦规律变化。3.3 功率驱动电路 驱动器的主回路采用交-直-交电压型逆变器形式,由整流滤波电路、三相逆变器 以及步进电机等组成。整流滤波电路构成直流电压源,完成220V、50Hz交流电 源到直流电源的变换。逆变器实现从直流电到变频变压交流电的转换,为三相混 合式步进电机的定子绕组提供要求的交流电流。逆变器由仙童公司生产的六只 G30N60B3DMOS 管组成,构成三相逆变桥。驱动器采用两只电阻检测步进电机相 电流的瞬时值。功率驱动电路的核心是功率模块(MOS管)。MOS管 与电流追踪型PWM输出之 间必
13、须通过专用高速光耦连接。根据MOS管的过流值和电机峰值线电流来选用合 适的MOS管,即电机的线电流的峰值小于MOS管的最大电流值。本设计中电机最 大相电流为8.1A,该电流是相电流的有效值,峰值相电流为8.1* sqrt(2)= 11.312A 。此外,电机绕组在三角形接法时,线电流是相电流的 3 倍,所以线 电流峰值为19.6A。由G30N60B3DPDF文档知,其最大流值为30A,故可以保证正 常使用,正常工作要求适当的散热设计保证内部结温永远小于150摄氏度,因此 要外加散热器并强制风冷,以保证MOS管正常工作。3.4 并口通讯 为了避免在控制过程中停电或者其它特别原因掉电时造成损失,使
14、用带电 RAM 存储电机位置,保证来电后工件可继续完成加工。并口 RAM比传统使用的E2ROM 速度传输更快更可靠,可更有效的记录电机运行状态,但占用CPU的I/O 口较多, 这里 CPU 有足够的资源可以使用。3.5 控制软件流程图 4 主程序流程图定旳器中斷眾护信号?是I计障比校耦时1S并I吒辽以护:卞腿两t目相荃1M度的设 宦电丽由時都脇冲数馬 计址理再由希坏算法帶鴛矢畫U诗取电礎甭祥值陽询 并逬讦眩注处理斗J关斷巩啲井律保护灯牺坐标卑换距阵计录u夬覇在区间黄眄PWM图 5 中断部分的流程图为减少功耗和保护电机,设置了自动半流功能,它由滞环比较器自动进行调节。 4结论 实践证明本文所讲的
15、驱动方法其适应性很强,基本上可以适应所有的三相混合式 步进电机。特别对三相绕组星形接法,低频时运行平稳,无振荡,有效地抑制了 振荡、噪声。另外,驱动器内部设计多种保护电路,使整个驱动器的可靠性大大 提高。一、三相混合式步进电动机驱动原理 1.工作原理根据三相混合式步进电动机的 转动原理可知,在平面转矩的矢量表示方法中,用 T_U 表示相绕组正向通电时产 生的电磁转矩,当U相绕组反向通电时,产生的转矩与上述情况相反,用(?)_U,表 示:则T_V、(?)_V和T_W、(?)_W分别表示V相和W相绕组正、反相通电时所产 生的电磁转矩,T_U、T_V、T_W三个转矩矢量之间相互差120度电角度。即T
16、_U、 T_V、T_W、(?)_U、(?)_V、(?)_W六个转矩矢量之间相互差60度电角度。 上海昀研专业生产二、四相混合式步进电机,混合式细分步进电机驱动器,三相 混合式步进电机,三相混合式步进电机驱动器,并根据客户要求订做正齿轮减速 步进电机,行星减速步进电机,丝杠步进电机,直线步进电机,给予求购步进电 机、步进电机驱动器单位的单位优惠的步进电机价格,步进电机驱动器价格,上 海昀研除了销售步进电机产品,还提供步进电机单轴控制器,步进电机双轴控制 器,步进电机三轴控制器,并针对用户开发步进电机控制系统,用户可以在中国 步进电机网察看步进电机资料,步进电机图片,步进电机价格。上海旳研的步进电
17、机产品,20BYG250, 28BYG250, 35BYG250, 39BYG350, 42BYG250, 42BYG350, 56BYG250, 57BYG250, 57BYGH250, 60BYG250, 86BYG250, 86BYGH250, 85BYG250, 90BYG250, 90BYG350, 110BYG250, 110BYGH250, 110BYG350, 130BYG250, 130BYG350等步进电机、驱动器产品可以替代目前市场上相近的步进电机产 品:YKA2204MA, YKA2304ME, YKA2304MF、 YKA2404MA、 YKA2608MG、 YKA3
18、611MA、 YKA3722MA、 YKA3606MA、 2HB504MA、 2HB504MAE、 2HB605MAE、 2HB1108MAE、 YAK2811MA, D3HB68M, MC881C, Q2HB44MA(B), Q2HB44MC(D), Q2HB68MG(H), HB220M, MC881B, MC883C, SH-20403, SH-20504, SH-20803N, SH-20806ND, SH-20806N, SH-21006AN, MS-2H057M,MS-2H090M,MS-2H110M,MS-2H130M,MSA-3H057M,MSA-3H090M,MSA-3H0 90MH,MSA-3H110M,中国步进电机网,步进电机批发,上海步进电机,上海步进 电机驱动器,上海步进电机控制系统, step motor,step motr,step motor driver,stepping motor driver,
 三相混合式步进电机驱动器设计原理和控制详解
三相混合式步进电机驱动器设计原理和控制详解